
北斗定位在内河疏浚船舶管理中的研究与应用
2022-06-30 07:06:50郑文怡章哲颜陈云飞
水运工程 2022年5期
郑文怡,章哲颜,陈云飞
(中交上海航道勘察设计研究院有限公司,上海200120)
在航道疏浚施工过程中,及时掌控船队所有船舶的施工状态与整体施工进度是工程管理的重点和难点[1],可靠的船舶位置数据来源是实现疏浚施工智能管理的基础。目前内河船舶定位数据来源有AIS数据和船载卫星定位模块。
在内河疏浚施工项目中直接使用AIS定位数据存在局限性:1)无法保证部分AIS数据的定位精度(图1)。部分船载AIS设备可能依然采用单点定位,定位精度较低,无法满足工程分析的需求。2)无法保证AIS定位数据的频率(图2)。由于内河AIS基站数量减少,同时内河水域航道地形复杂、跨河临河建筑物对AIS信号衰减产生很大影响[2],造成AIS船台定位数据回传频率不稳定,数据传输丢包率较高,最终导致船舶轨迹不连续或缺失,无法满足管理对于船舶实时监控和分析的要求。

图1 AIS定位精度低导致数据点漂移

图2 AIS数据频率低导致轨迹点丢失
北斗卫星导航系统是我国建设运行的全球定位系统,北斗定位技术在远海施工[3]、船舶监控[4]和内河航运监管[5-6]等方面均已得到成功应用,但在内河疏浚施工中的应用较少。本文将北斗定位技术应用到内河疏浚施工船舶管理中,避免了直接使用内河AIS数据可能导致的问题(图 3),将定位数据的精度提高到亚米级,数据传输频率提高到秒级。同时借助智能算法和GIS(地理信息系统)空间分析技术,在管理业务上开展了自动化监管功能的研究。研究成果提高了管理效能,实现了内河疏浚船舶管理的精细化、智能化,使疏浚船舶最大限度地发挥其生产效益。
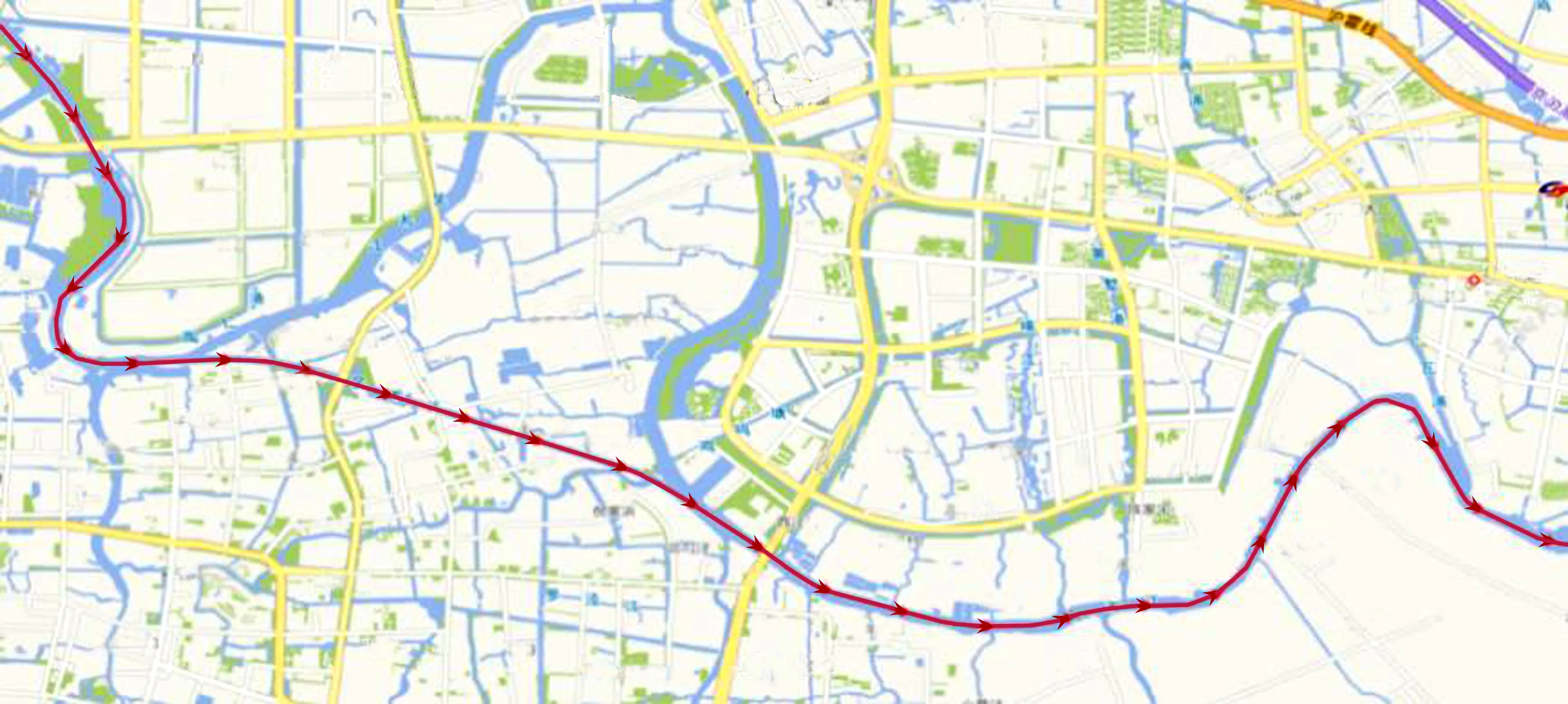
图3 使用北斗定位模块采集得到的平滑轨迹
1 北斗定位的应用
1.1 定位数据的传输
与AIS使用的广播式窄带通讯系统不同,北斗定位模块在城市中使用GSM数字移动通讯网进行信号传输。城市中GSM具有广泛的覆盖范围和良好的稳定性,同时因为技术成熟、具有较好的经济性,对于内河船舶信号通讯是一种较好的解决方案。
通过移动网络(2G/4G/5G),定位模块在互联网上与接收服务器建立端到端的信号传输通道,只要保证二者的网络连接就可将通讯频率维持在秒级,大幅提高数据的传输效率。
云端服务器在接收到定位模块信号后将依据JT808协议[7]与其建立TCP长连接,进行双向通信。同时,服务器将信号解析后可获得位置数据并录入数据库。双向通讯流程为:
1)建立连接。定位模块首先发送终端注册信息,服务器接收到注册信息后回复平台注册应答,表明连接建立。此时可对设备信息进行判断,若数据库中无此设备相关信息则将新设备录入数据库。终端接收到注册应答后将立即发送终端鉴权信息,服务器回复平台通用应答,完成鉴权后定位模块准备发送定位数据。
2)维持连接。定位模块根据设备设定的时间间隔定时发送位置数据,服务器回复平台通用应答。此阶段服务器将进行位置数据入库,并对重复的数据进行过滤。在没有数据包传输时,定位模块会周期性向服务器发送终端心跳信息以维持通讯连接,服务器回复平台通用应答。定位模块若未接收到平台应答将主动再次发送数据,确保数据不会遗漏,直到接收到应答或连接断开。
3)断开连接。定位模块和服务器均可主动断开连接。
由于施工船队通常有多条船舶,意味着服务器要同时与多台北斗终端进行数据通讯。考虑到这种高并发问题以及数据实时采集所需的低延迟要求,采用Netty框架开发通信服务器。Netty使用了IO多路复用技术,能够在同一线程中处理多条消息的收发,在减少计算机资源消耗的同时具备更高的吞吐量,从而实现高并发访问,满足数据采集的开发要求[8]。
1.2 定位数据的存储
由于定位模块数据上传频率很高,并且船舶数量众多,因此定位数据的体量将非常庞大。定位数据有如下特点:1)带有时间属性,数据量不断递增;2)以新增为主,无更新、删除操作;3)数据存储写入并发高。这样的数据称为“时序数据”,常规的关系型数据库对于大量的时序数据处理能力较低,为了提高数据库的读写与存储能力,采用阿里云的时序数据库(TSDB)来存储定位数据。
原始位置数据录入TSDB后,定时从TSDB中拉取位置数据做抽稀处理。因为定位模块的采集频率高(最高可达1 s),而管理平台需要的频率只需维持在30 s即可,因此将数据抽稀后再写入业务数据库中,再基于业务数据库提供船舶实时位置与历史轨迹查询的服务,供管理平台使用。图4为本文北斗定位数据的采集流程。

图4 北斗定位数据采集流程
2 基于北斗定位的疏浚施工智能监管
基于常规定位数据,可实现实时定位、历史轨迹查询等基础功能。当数据的精度和频率提高时,借助GIS技术与智能算法,可以实现更多自动化监管功能(表1)。

表1 高经度北斗定位与常规定位可实现功能对比
GIS技术可以将空间数据转化为地图图形,为用户浏览和分析地理数据提供方便。空间关系的拓扑关系判断是GIS技术中一个非常重要的分析功能,二维空间中2个对象可实现的空间关系有8种(图5)。利用空间关系判断可以对船舶位置进行分析,如是否在预先规划的通行区域内,是否通过预先设置的范围。对挖泥船和吹泥船点位置做缓冲区,判断运泥船与缓冲区的空间关系,可以分析出运泥船的工作状态。
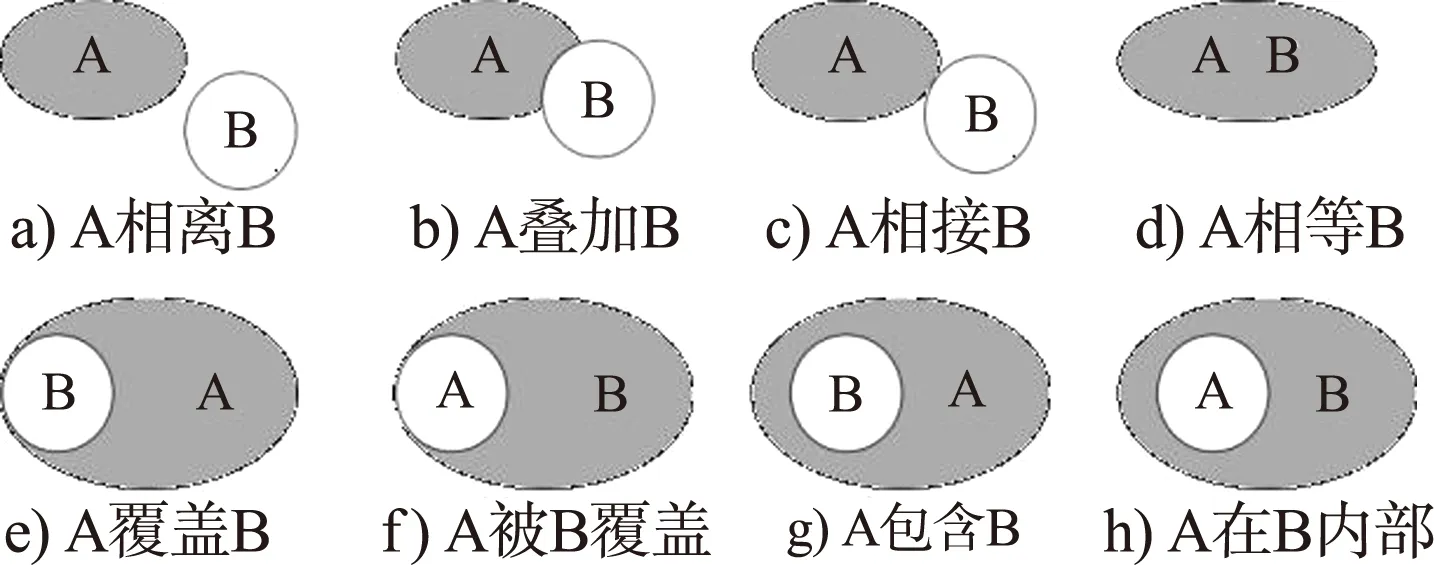
图5 二维空间拓扑关系
2.1 挖运吹全流程自动监管
挖运吹自动监管需要实现的功能有:确保船舶在规划范围内航行(电子围栏)、自动判定船舶的挖运吹状态、自动计算疏浚断面里程、自动记录靠离泊关键点。若要实现以上自动监管功能,需要先将疏浚航道范围、里程信息、关键水闸区域配置到监管系统中作为基础数据。
为了确保船舶是在指定范围内航行,在每次获取到最新的船舶数据时,将位置点和规划的行驶范围(河道边界的面数据)做二维空间拓扑分析,若点不在面内则表示船舶离开了指定范围。
挖运吹状态判定的对象是运泥船,当运泥船停留在挖泥点范围内时,可以判定为正在装泥;而当它停留在吹泥点范围内时,可以判定为正在吹泥。但是在疏浚施工过程中,挖泥点与吹泥点会发生变化,无法预先配置。在实际进行挖运吹状态判定时还需要结合挖泥船与吹泥船的实时数据。将运泥船最新位置数据与所有挖泥船的最新位置数据做拓扑分析,设定在某艘挖泥船的缓冲区内(参考船舶平均长度)停留一定时间(参考平均装泥时间),则判定该运泥船处于装泥状态。同理对所有的吹泥船分析,设定在某艘吹泥船的缓冲区内停留一定时间(参考平均卸泥时间),判定该运泥船处于吹泥状态;已处于装泥状态运泥船离开挖泥船后,未处于任何吹泥船缓冲区内,则判定处于运泥状态。
疏浚断面里程自动计算是在运泥船被判定为装泥状态时,根据航道里程轴线数据与挖泥船所在位置进行GIS中的线性参考分析,可以计算出对应的里程数据。
水闸的靠泊离泊自动记录是将运泥船位置与水闸区域面进行二维空间拓扑分析,在运泥船首次处于水闸范围内时,则判定运泥船进入水闸;在运泥船首次离开水闸时,则判定其为离开状态。
2.2 挖运吹三联工单自动生成
在传统疏浚施工船舶管理中,需要手动填写疏浚工单,记录装泥、卸泥和经过关键点的时间等,需要同时处理大量的数据,无法保证数据的可靠性。
在挖运吹全流程自动监管的基础上,在运泥船进入装泥状态时就可自动生成一条新的工单数据,记录装泥点信息。在船舶靠泊离泊水闸时可自动填写时间。在船舶进入吹泥状态时记录吹泥点信息,完成一条工单。工单自动生成流程见图6。

图6 挖运吹三联工单自动生成流程
3 工程应用实例
苏州河(真北路—蕰藻浜)底泥疏浚工程是“苏四期”工程的子项目,底泥疏浚量为172万m3。工程东起真北路,西至蕰藻浜,干流河道中心线长22.15 km,共涉及长宁、普陀、闵行、青浦和嘉定五区。该工程于2019年上半年开工建设,于2020年底完成。项目使用了112个带有CORS功能的北斗,并开展了相关业务层应用开发。
3.1 实时定位
所有船舶均装载了北斗定位模块,在可视化平台上可以显示所有船舶的实时位置(图7),并且能够自动刷新数据,让使用者能及时掌握整体施工情况。

图7 船舶信息弹窗
3.2 船舶历史轨迹展示
实时轨迹存储后,可通过可视化页面查看历史轨迹,相比于传统的定位手段,北斗可将历史轨迹点间距维持在30 s,大幅提高了轨迹追溯的准确性(图8)。
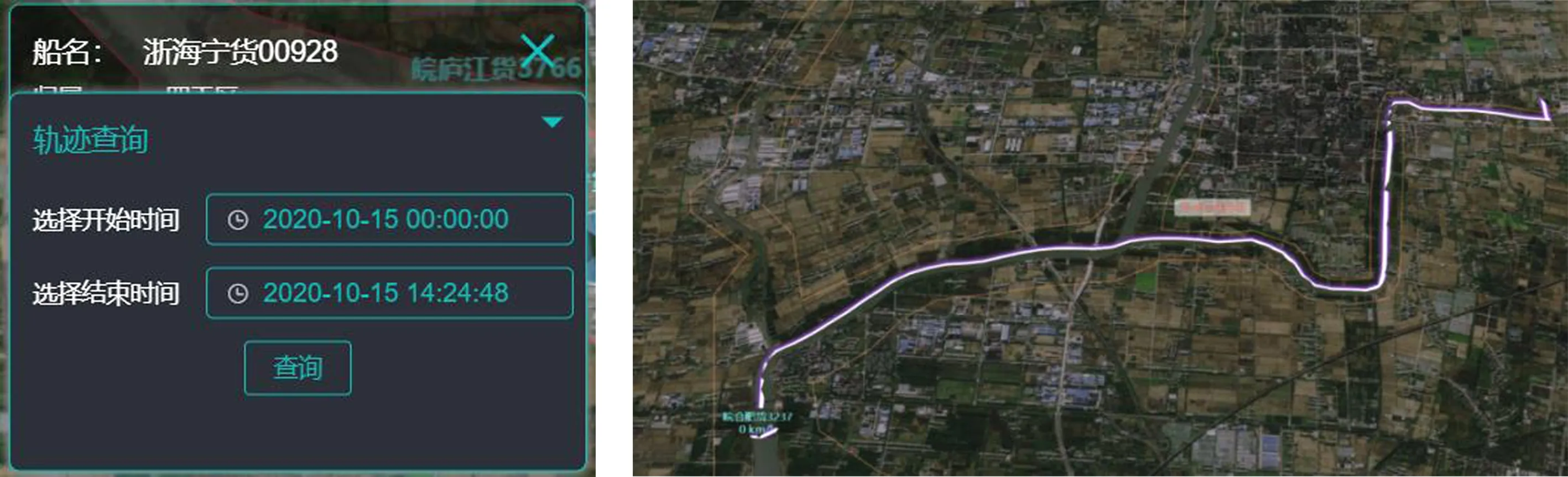
图8 船舶历史轨迹查询结果
3.3 电子围栏报警与追溯查询
基于船舶实时位置数据和施工范围的空间分析结果,可以即时得知船舶离开了预先规定的行驶范围,从而在平台中显示电子围栏报警信息。点击信息将定位至越界位置,并显示越界时间(图9)。

图9 电子围栏预警与追溯查询
3.4 自动工单填报
基于关键位置数据与船舶位置数据,利用自动算法,实现挖运吹工单的自动填报。工单具备编辑功能,可对自动生成的工单进行审核修改,完善工单的准确度。项目最终生成4 838条自动工单,大幅提高了现场的数字化应用效能(图10)。

图10 自动工单填报
4 结论
1)在疏浚施工过程中,及时掌控船队所有船舶的施工状态与整体施工进度是工程管理的重点和难点。内河船舶AIS位置数据和人工填报工单的方式已经无法满足项目上对于大量船舶及时控管和工作量统计的需求。将船载北斗定位技术运用于疏浚船舶管理,可以提高施工管理水平,实现疏浚施工管理的数字化、精细化、智能化。
2)北斗定位技术是本研究的基础,也是我国自主研发的卫星导航系统在疏浚行业的一次成功应用。船载定位模块为管理平台展示、分析船舶施工情况提供了稳定、可靠的数据来源。
3)基于高精度高频率的北斗定位数据,利用GIS技术中的空间关系判断实现了挖运吹全流程的自动监管,充分体现了管理平台的智能化,为管理人员对船舶疏浚过程的监督、回溯、优化提供了科学及时的决策依据。
4)研究成果在“苏四期”底泥疏浚项目中得到成功应用,基于北斗定位的疏浚船舶管理技术可以为同类工程实现自动化管理提供示范与参考。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
电子测试(2022年7期)2022-04-22 00:13:16
高技术通讯(2021年6期)2021-07-28 07:39:20
铁道通信信号(2019年9期)2019-11-25 01:44:58
当代陕西(2019年18期)2019-10-17 01:48:50
中国核电(2017年1期)2017-05-17 06:09:55
知识产权(2016年8期)2016-12-01 07:01:13
太空探索(2016年3期)2016-07-12 09:58:47
网络空间安全(2016年3期)2016-06-15 20:27:10
