面向6G网络的水下光通信系统*
2022-06-30 05:57王林宁刘鹏展胡芳仁王永进
移动通信 2022年6期
王林宁,刘鹏展,胡芳仁,王永进**
(1.南京邮电大学Peter Grünberg研究中心,江苏 南京 210003;2.南京邮电大学电子与光学工程学院、柔性电子(未来技术)学院,江苏 南京 210003)
0 引言
目前,第五代移动通信(5G)规模商用实现了快速发展,各个国家和机构也逐步开始了第六代移动通信(6G)的研究。6G 网络整合了陆地、水下、空间和空中网络[1],将为人们提供极高的通信速率和信号覆盖。然而由于这些场景的环境差异巨大,受限于紧张的无线通信频谱资源,单一的传统无线通信难以达到全面的高速覆盖。因此,6G 网络要实现一体化的网络需要将各种无线通信方法融合到一起,发挥其各自优势,才能够实现全面的高速覆盖。其中,可见光通信作为一种利用400~800 THz 无需授权频段的高速通信技术[2],将在6G网络中担任重要的角色。
2014 年度诺贝尔物理学奖授予日本名古屋大学的Isamu Akasaki、Hiroshi Amano 以及美国加州大学圣巴巴拉分校的Nakamura Shuji,以表彰他们在发明高效节能的蓝光发光二极管(LED,Light Emitting Diode)方面的贡献。他们制成了高质量的氮化镓晶体,并在此基础上实现了蓝光LED 器件。相比于其他光源,高效节能的LED 照明光源将有助于节约地球资源,同时LED 器件具有高的开关响应速度[3-4]。可见光通信是基于LED 器件发展起来的无线光通信技术,利用其输出光功率和驱动电流的高速响应特性,以可见光作为信息载体,实现无线通信[5-7]。可见光通信技术拥有无需授权的丰富频谱资源,可有效避免射频电磁信号泄露等弱点[8],是6G 通信、物联网、数据中心、光互连、智慧显示等领域的关键新兴技术,在复杂电磁环境及水下等特殊场景具有广阔的应用前景。基于此,本文从水下光通信(UOWC,Underwater Optical Wireless Communication)的应用需求出发,采用亚波长垂直结构LED 器件实现高出光效率、高调制速率的兼容,设计并实现了一种面向6G 网络的水下蓝光通信系统。
1 UOWC的应用与现状
1.1 需求来源与应用场景
近年来,人们大规模开发海洋资源,为了完成更严峻、更精准的水下作业,对作业的通信需求越来越高,如图1所示,对于如水下焊接、海洋风电设备维护、无缆水下机器人(AUV,Autonomous Underwater Vehicle)等深海装备高速信息传输的场景需求如何实现通信,这对现如今主流的水下通信技术是极大的考验。

图1 水下无线光通信典型应用场景
传统的水声通信在水下传播衰减极低(0.1~4 dB/km),因此它可以覆盖长达几十公里的距离。然而,声波较低的传播速度(1 500 m/s)、有限的带宽(kHz)、容易导致多径效应、传输延迟大、设备体积大等特性,都阻碍了它应用于高实时性、带宽密集型场景。另外,高频的射频波虽然可以提供高数据率(Mbps)、高带宽(MHz),但是由于海水的高导电性(3.5~5 dB/m)在水下会受到极大的衰减,限制了只有数米的传输距离[9]。
清澈的海水对蓝绿波段(450~570 nm)的可见光吸收损耗极小(0.4 dB/m),同时光波传输速度快、通信速率高(Gbps)、延迟低以及拥有THz 级的可用带宽[10-11],因此蓝绿无线光通信可以解决深海高速通信的瓶颈问题,是海洋装备关键的水下高速、大容量通信技术手段。重要的是,与铺设的有线光纤不同,水下无线光通信需考虑海水作为信道,大功率的激光器(LD,Laser Diode)不仅因海水湍流难以对准,也更容易对精密光学探测器造成不可逆的饱和损害。相比激光器,LED 发散光束角大、功率小[12],兼顾照明,更适合应用于水下传感器数据采集、水下无人潜航器(UUV,Unmanned Underwater Vehicle)等运动平台间高速信息传输,是各国竞相研发的高速深海无线通信技术。
1.2 国内外发展现状
国内外的高校及科研院所从不同的研究角度与目标,对水下无线光通信及其系统进行了很多的研究,如通信系统的编码与调制方式、水下通信信道的分析与建模、发送接收电路的软硬件均衡等。国外利用其LED 器件方面的优势,较早开展基于LED 的水下光通信研究与产业化。2002年,日本Keio 大学Laux A 等分析了悬浮颗粒对水下通信信道的影响,证明了水下光学传输特性与水体杂质的高相关性[13]。日本的中川实验室推出了水下潜水员之间使用的可见光语音通信装置,通过手持通信设备、防水麦克风与骨传导扬声器进行实时交流。2010 年,美国耶鲁大学开发了双工水下可见光通信系统AquaOptical II,该系统最远可以实现水下50 m、2.28 Mbit/s 的通信速率[14]。2016 年,阿卜杜拉国王科技大学沈超等利用450 nm 激光器与雪崩探测器,在12 m 距离内实现2 Gbps、20 m 距离实现1.5 Gbps 的高速通信[15]。2018 年,意大利圣安娜大学Giulio Cossu 等在拉斯佩齐亚港进行了系统海试,该试验于高浑浊度的海水中,强烈光照的影响下成功在10 m 的距离内实现了10 Mbit/s 的传输[16]。
国内课题组多采用离线处理模型,即发射机采用任意波形发生器,并由示波器显示、存储和接收数据,利用Matlab 对数据进行处理,这种实验模式提供了通信链路的可行性与极限分析,但应用于实际的海洋装备尚有差距。2017 年,复旦大学刘晓燕等提出了基于低功率520 nm 激光器二极管的水下无线光通信系统,通过NRZ-OOK(Non-Return-to-Zero On-OFF Keying)调制方案实现了在34.5 m 的距离内最高为2.7 Gbps 的通信速率[17]。2021 年,复旦大学田朋飞课题组首次利用Micro-LED 作为一体化集成芯片,实现了高性能双工水下无线光通信以及水下充电综合应用系统的构建,并采用OOK 调制在2.3 m 的水下信道中实现了最高660 Mbps 的实时通信速率[18]。2022 年,北京邮电大学张家梁等提出了噪声光环境干扰条件下的水下无线光通信性能理论模型,搭建了基于852 nm 波长的水下无线光通信实验平台,并验证了在正交相移键控调制格式下通过使用干涉滤光片可使传输链路长度延长34.8%,大大增加了光学传输链路的距离[19]。国内高校与科研院所对水下光通信技术的研究工作大多聚焦在水下信道建模、光通信系统模型理论的研究,研究水平与国外有一定差距。其中,水下无线光通信系统的实时处理模型虽然能即时对信号进行有效处理,更适用于实际的水下环境,但因这类设计通常要求更为复杂的调制、解调硬件结构,故少有商用原型系统。
2 面向6G网络的UOWC系统
实际6G 应用场景要求无线光通信系统具有更远传输距离、更高传输速率,因此高出光效率、高调制带宽的LED 器件是系统的关键痛点。图2 为UOWC 系统原理框图,本文融合亚波长蓝光LED 阵列、收发光学、大功率高速驱动、高灵敏度探测与数字编码调制等技术,获得应用于实际水下场景的蓝光通信系统。
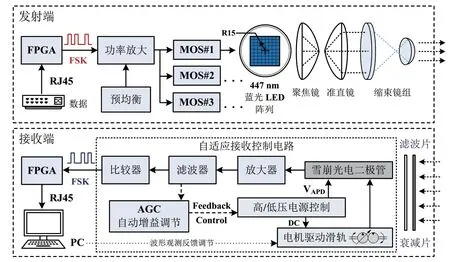
图2 水下光通信系统收发端原理框图
2.1 亚波长垂直结构LED器件
传统上,通过减小LED 器件的出光面积提高器件的调制速率,但是减小器件的出光面积将影响通信系统的传输距离。面向水下光通信系统对高出光效率、高调制带宽LED 的迫切需求,本文探索先进微纳制造技术,基于器件厚度小于其发光波长的亚波长理想LED 模型,研制垂直结构蓝光LED 器件,通过减薄器件厚度、不减小器件出光面积来提高器件的调制速率和出光效率,用于水下蓝光通信系统。如图3 所示,亚波长垂直结构LED器件厚度小于其发光波长,能抑制器件内部波导模式提高器件出光效率,降低RC 时间常数提高调制带宽,减小发射阵列单元之间的光串扰,是远距离、高速水下光通信系统的关键器件。
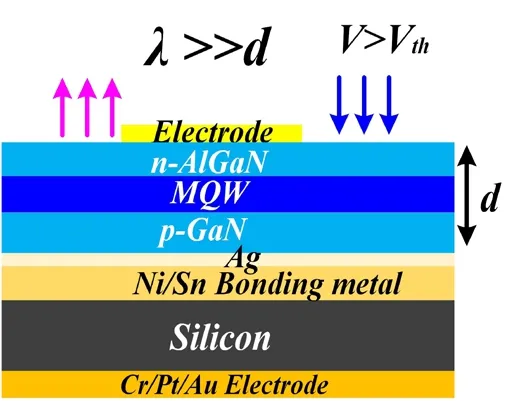
图3 亚波长垂直结构LED器件示意图
基于硅衬底氮化镓晶圆,笔者制备了垂直结构蓝光LED 器件。如图4(a)所示,器件长为990 μm、宽为430 μm;LED 器件的横断面扫描电子显微镜图如图4(b)所示,器件的厚度约为1.27 μm。

图4 垂直结构LED的形貌图(a)和器件横断面图(b)
器件的I-V 特性采用Keithley 2636B 数字源表进行表征。如图5 所示,当注入电流为0.52 A 时测得的电压为3 V,可从线性区域的I-V 曲线斜率中提取出5.77 Ω的动态电阻。其中,插图为器件注入电流0.52 A 时的发光图。
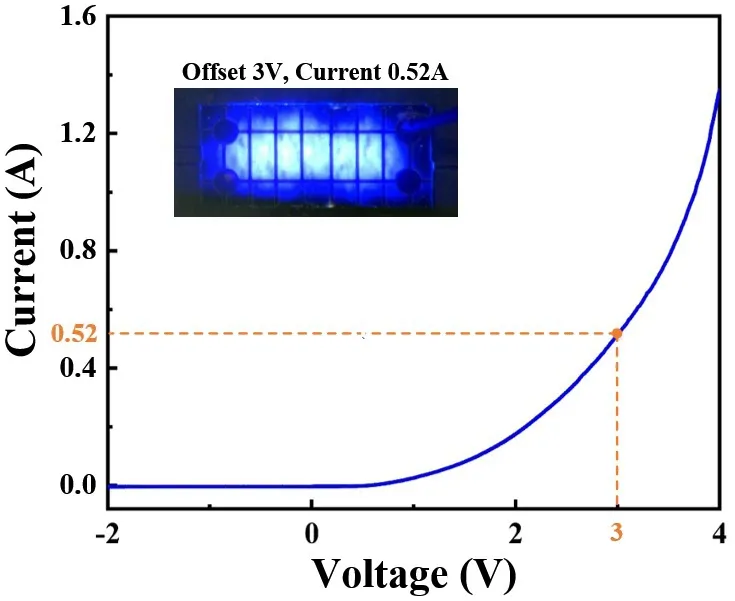
图5 垂直结构LED的I-V曲线图
使用Keithley 2636B 数字源表作为直流电源为LED提供恒定电流驱动,采用直径200 μm 的多模光纤收集LED 发射光,通过USB4000 海洋光谱分析仪进行表征。如图6 所示,器件发光光谱的主峰在447 nm,发光强度随注入电流增加而增强。通过改变注入电流调控LED 器件的发光强度,从而实现信号的光加载。
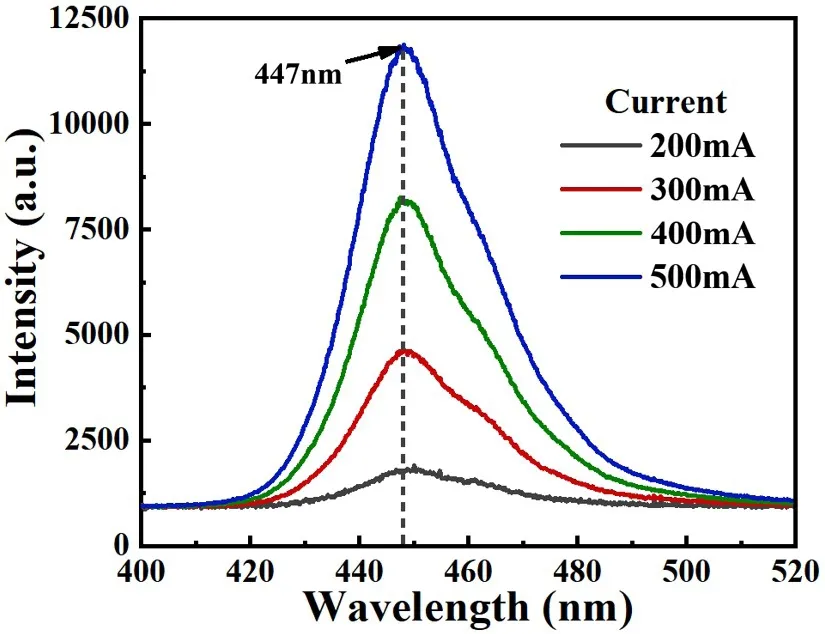
图6 垂直结构LED的电致发光谱
本文采用T 型偏置器为LED 提供信号与直流偏置,测试其3 dB 带宽。信号由Agilent Technologies PNA-LN5203C网络分析仪经由放大器与衰减器发出,与PIN型光电二极管、放大器、衰减器流向网络分析仪构成的接收回路。如图7所示,本文器件的3 dB 带宽为13.6 MHz,此时信号幅度下降为峰值的0.707 倍。其中,插图展示了器件在最佳工作点时采用16QAM 调制误码率千分之三的星座图,最高通信速率为375 Mbit/s。
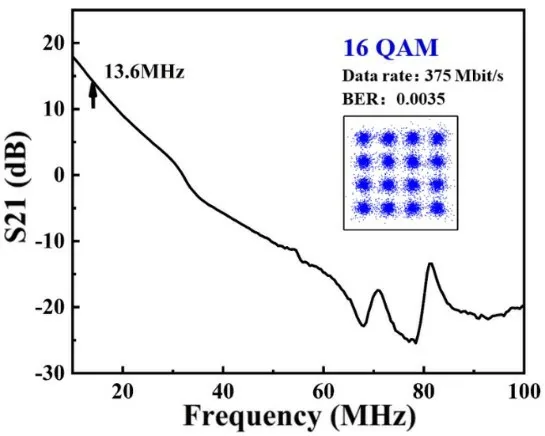
图7 器件的3 dB带宽与16QAM调制星座图
本文采用垂直结构LED 器件建立了光通信系统。系统发射端由Keysight 333600A 任意波形发生器以1 V 的峰值电压和3 V 的偏置电压驱动器件将伪随机二进制序列(PRBS,Pseudo-Random Binary Sequence)信号编码为光信号。另一端,采用Hamamatsu C12702-11 探测器将光信号转换成电信号,发送到Keysight DSOS604A 数字存储示波器。图8 为数据通信速率为60 Mbps 时的眼图,眼宽即“眼睛”空白部分在横轴的长度约为10 ns,说明信号总体较稳定但伴随一定的时域抖动。器件在高频的最佳抽样时刻为“眼睛”睁开最大的时刻,系统应用可以选取幅度达到最大幅度的80% 以上或最小幅度时间内进行电平信息采样。

图8 垂直结构LED的60 Mbps通信眼图
2.2 大功率发射驱动电路
在有限的带宽内提高调制速率,是大功率LED 阵列驱动和脉冲整形技术要解决的关键问题。图9 为本文发射电路的原理框图,发射端主要分为信号驱动电路与LED恒压恒流供电电路。
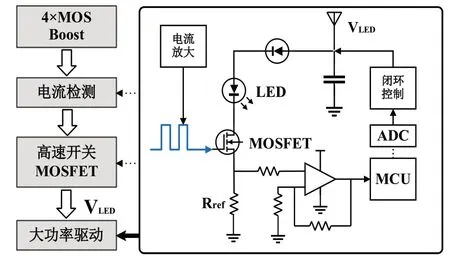
图9 大功率发射驱动电路框图
信号驱动电路的输入为双极性信号,采用前级功率放大电路对信号源进行放大,提高信号负载能力。MOSFET驱动电路利用信号控制栅极实现对LED 阵列的调制。发射端驱动电源采用4MOS 稳压保护电路,单片机(MCU,Microcontroller Unit)通过对源极精密电阻Rref 进行电压采样,求取流经LED 的电流平均值并与设定的电流容限比较,再输出控制信号反馈至电源芯片来保证LED 阵列长时间的恒压恒流供电。
2.3 高灵敏度自适应探测电路
不同海况的内部湍流、紊流现象大相径庭,无线通信系统在实际水下运用时难以保证无偏转角度,因此本文引入信道角度偏转模型如图10 所示。系统光电传感器前采用菲涅尔透镜组,使其在一定偏转角度范围内都能探测到光信号,这需要精确的光学焦点建模以及接收光功率与闭环增益控制数值的训练。
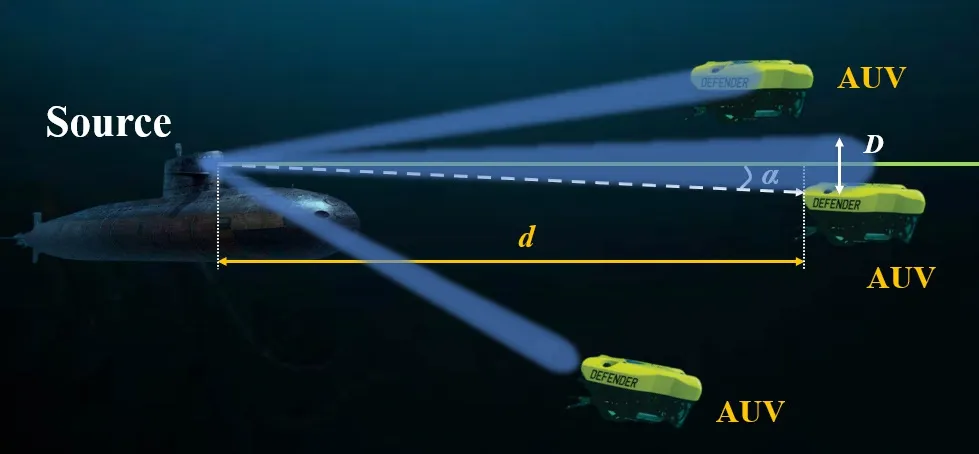
图10 水下信道的光学接收模型
系统的接收端由光电转换电路、放大滤波电路、模数转换电路三部分构成。本文采用雪崩光电二极管(APD,Avalanche Photodiode)作为探测器,高压供电的APD与跨阻放大器将光信号转换成电信号,通过高通滤波与后级放大器将低频环境光噪声滤除,最后信号通过模数转换电路如比较器等进行判决输出。
为了适应通信距离变化引起的信号幅度波动,本文设计了一种闭环负反馈自动增益控制(AGC,Automatic Gain Control)系统,即前端放大电路的增益随信号强度自动调整,以达到稳定信号幅度的目的。图11 为AGC电路部分实现原理,压控放大器与滤波器采集接收信号幅度,由MCU 反馈至电源,通过动态调节APD 的供电电压来达到自适应的目的,从而在接收端形成控制闭环。
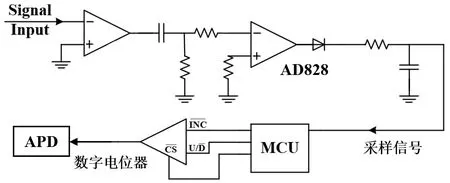
图11 接收端AGC电路部分原理图
2.4 数字编码调制模块
数字编码解调模块是本文UOWC 系统中的信号源与信宿,作为系统与上位机如IP 摄像头、电脑或路由器等设备的数字连接。
如图12 所示,本文采用现场可编程门阵列(FPGA,Field Programmable Gate Array)进行数字调制与编码,重点实现2 MHz 二进制频移键控(FSK,Frequency Shift Keying)调制。通过使用该调制技术,可以增强可见光通信系统的传输可靠性,提高复杂信道中的抗干扰能力。
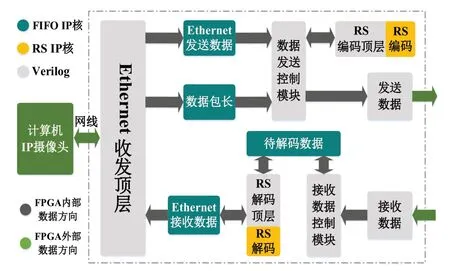
图12 数字编码调制模块架构
本文采用RS(255,239)纠错码(Reed-Solomon codes),包含8 个帧头与8 位校验位,实际有效数据239 位,最多可纠正8 个错误位,纠错效率达94%。RS 码是一类纠错能力很强的非二进制BCH 码(Bose-Chaudhuri-Hocquenghem codes),即使信道存在大量噪声与干扰,当收到一定数量的正确数据点后就可以恢复多项式,完成有效纠错。这适合UOWC 系统在复杂信道中纠正因热噪声引起的单个比特随机错误或比特连续出错而产生的突发错误。
2.5 水下通信实验
图13 展示了本文面向6G 网络的UOWC 系统外观图与水下全双工通信的场景:
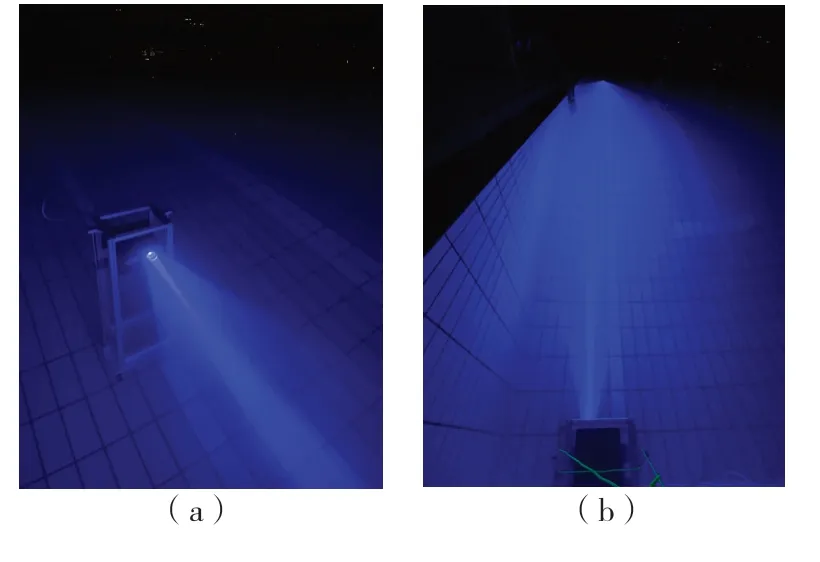
图13 UOWC系统外观(a)和水下全双工通信(b)
为了方便测试,本文将收发端系统各置于衰减系数为0.4 dB/m 的10 m 水槽窗口两端,如图14(a)和(b)所示,双方接收端均配有D25mm,OD=0.6,透过率25% 与OD=1.0,透过率10% 共计40 倍衰减的光学衰减片,来模拟纯净海水50 m@0.4 dB/m 的通信信道。收发两端分别连接电脑与基于TCP 协议的网络摄像头进行视频传输,用RIGOL DS1102Z 数字存储示波器采集系统发射端LED 阵列、MOS 管栅极与漏极波形,以及接收端跨阻放大器、高通滤波器与比较器输出波形。图14(c)和(d)分别为系统发射端与接收端的2 MHz 调制信号波形图,其中灰色曲线为控制信号即MOS 管栅极调制波形,峰值Vpp约为11 V。灯珠阵列电源与MOS 管漏极形成的幅度差值控制LED 发光强度的变化,从而发出连续的调制光信号。接收端达到了对微弱信号约50 K 倍的转换增益,后级设置的滤波电路对外界环境光、前级电路引入的噪声进行了有效滤除,自动增益控制功能避免了信号出现削顶、削底失真,模数转换输出波形规整、无误判现象,
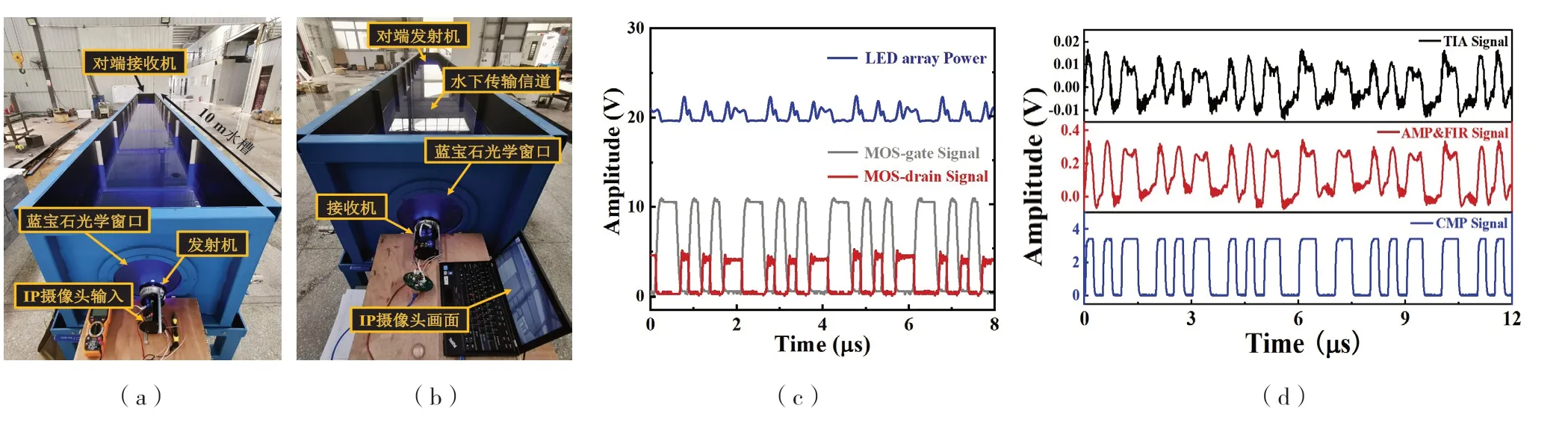
图14 水下模拟信道的发射端视角(a)、接收端视角与视频通信(b)、发射端输出波形(c)和接收端输入波形图(d)
测试结果表明,本文提出的基于亚波长垂直结构蓝光LED 的UOWC 系统实现了水下50 m 通信距离不低于2 Mbps 的通信速率,并支持音视频、多路传感数据等业务的实时高速传输。
3 结束语
水下光通信是6G 空天海地一体化的关键技术,光发射芯片是核心的器件。本文采用亚波长垂直结构蓝光LED,实现了高出光效率、高调制速率的兼容,并且基于该器件设计研制采用RS 编码2FSK 调制方式,具备大功率发射驱动、高灵敏度自适应探测能力的水下蓝光通信系统。实验结果表明,该系统实现了水下50 m 距离2 Mbps 传输速率的音视频实时通信功能,这在海洋水下智能装备应用中具有极大的工程价值。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
新能源科技(2021年6期)2021-04-02
科学技术创新(2021年7期)2021-03-23
家庭影院技术(2019年8期)2019-08-27
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
池州学院学报(2017年3期)2017-10-16
现代传输(2016年3期)2017-01-15
电信科学(2016年11期)2016-11-23