面向6G的欠采样相移键控可见光调制方案*
2022-06-30 05:57包荣珍彭朗贾松霖冯春燕朱志宇杨洋
移动通信 2022年6期
包荣珍,彭朗,贾松霖,冯春燕,朱志宇,杨洋**
(1.北京邮电大学信息与通信工程学院,北京 100876;2.航天东方红卫星有限公司,北京 100094)
0 引言
为解决未来高度智能、高度数字化和高度信息化社会对无线传输的需求,6G 无线网络在无线连接的维度、广度都将有巨大的提升,支持诸如超大带宽视频传输、超低延时工业物联网、空天地一体互联等诸多场景[1]。为支持上述愿景和应用,6G 通信系统的性能要求必须实现如1 Tbps 超大峰值速率和1 Gbps 超大用户体验速率、超低延时0.1 ms 和高移速通信、超高频谱利用率等[2]。为了支持极高的峰值速率,支持的最大接入带宽必须大幅增加。毫米波频段可支持10 GHz 的带宽[3],而太赫兹和可见光频段可高达100 GHz[4],激光、可见光通信和太赫兹波段通信是6G 研究的主题之一。基于此,本文主要研究可见光通信在移动终端上的实现,提出了一种基于FEC-UPSOOK(Forward Error Correction-Undersampled Phase Shift On-Off Keying,前向纠错的欠采样相移键控)调制技术,降低了手机摄像头帧率不稳定给通信系统的误码性能带来的影响。
1 可见光通信技术
近年来,基于LED 的VLC(Visible Light Communication,可见光通信)技术受到广泛关注[5]。与现有的无线通信技术相比,它具有频谱资源丰富、安全性好、低成本等优势[6-7]。根据接收端使用设备的不同,现有的可见光通信系统可以分为两类:基于PD(Photodiode,光电探测器)的可见光通信系统和基于IS(Image Sensor,图像传感器)的可见光通信系统。其中,基于PD 的可见光通信系统一般用于高速数据传输场景,可以实现Gbps 速率级别的数据传输;基于IS 的可见光通信系统则主要用于室内环境中的定位和设备配对信息传输、车辆通信中的碰撞检测、危险路况信息传递等[8-9]。相比于PD,IS 作为接收端接收视场角更大,能够更大范围的接收VLC 信号,这一通信方式也被称为OCC(Optical Camera Communication,光学成像通信)。随着半导体技术的迅速发展,大多数智能手机都内置了CMOS(Complementary Metal-Oxide-Semiconductor,互补金属氧化物半导体)相机,为OCC 提供了广泛的硬件支持[10]。然而,由于手机摄像头帧率低且不稳定,基于手机CMOS 相机实现高可用的可见光通信系统仍面临巨大挑战。
现有基于手机摄像头的可见光通信研究主要是利用CMOS 相机的“卷帘效应”进行基于图案明亮条纹信息的调制[11-17],接收端根据亮暗条纹的宽度或频率解码。文献[11] 通过反射表面捕捉图像,以缓解LED 光斑的晕染效应,但是该方案造成了光功率的逸散,需要较高的LED 功率;文献[12] 利用灰度图像的所有灰度值数据进行信号解调来提高系统的鲁棒性,相比于传统解调方案中利用单列灰度值实现解调,其计算量成倍提升;文献[13]通过灰度校正、直方图均衡、高通滤波等实现复杂光环境中的数据传输,但是需要较长的数据处理时间。另外,文献[14] 至[17] 利用数字图像处理手段来提高系统的误码性能,但是其通信距离受到LED 大小和手机摄像头硬件的限制,一般小于1 m,如文献[14] 提出了一种基于LED 能量扩散的列灰度值选择方案,有效提高了图像的对比度,但通信距离只能达到30 cm;文献[15] 提出了HyperSight 图像解码算法,利用灰度特征矩阵和临界灰度值来替代传统的单列灰度值及函数拟合阈值,可以实现距离为50 cm 的通信。
综上所述,目前基于图案明亮条纹信息调制方式的可见光通信系统中尚存在系统复杂度高、计算量大、通信距离短等问题。与此对应的是基于LED 亮灭状态的欠采样调制方案复杂度低、计算量小且不存在收发端距离的限制,如文献[18] 提出了UPSOOK 调制方案,只需要计算不同状态对应的灰度值范围,复杂度低且通信距离可达15 m,文献[19] 针对UPSOOK 调制方案中的各种问题构建了一套参数模型,在保证误码率极低的情况下使得通信距离增加到160 m。然而,手机摄像头帧率不稳定的问题对于收发端同步要求很高的欠采样调制方案而言是一个不小的挑战[20],目前还没有利用手机摄像头实现基于LED 亮灭状态的欠采样调制方案的相关研究。
基于此,本文针对手机摄像头帧率不稳定的问题提出了FEC-UPSOOK 调制方案。首先为了消除收发端之间存在的相位误差,设计了FEC-UPSOOK 的系统帧结构,然后通过设计自适应阈值计算策略,以避免收发端之间距离和角度的差异对采样亮度值造成的影响,最后设计针对帧率抖动的前向纠错机制进行纠错,从而实现可见光信息的可靠传输。为验证此方案的有效性,本文设计并搭建了基于手机摄像头的可见光通信实测平台,结果表明相比于传统的UPSOOK 系统,FEC-UPSOOK 的系统误码率从10-1下降到10-3,有效地提高了误码性能。
2 系统模型
在OCC 系统中,随着收发两端距离、相对角度等因素的变化,接收到的图像质量会出现明显改变,影响到对发送信息的判定、识别,乃至信息恢复。OCC 系统接收的矢量信号可以表示为:

其中,信道矩阵H 由发送端和接收端之间的直流增益组成。LED 可以建模成朗伯辐射模型[21-22],因此发送端到接收端的直流增益可以表示为:

其中,Ψin是入射角;Ts(Ψin) 是光学滤波器增益;g(Ψin)是聚光器增益;Ψir是LED 的辐射角;m是朗伯系数,可以通过LED 的半功率角φ1/2计算得到;D是收发机之间的距离;Ac是LED 在图像传感器上的投影面积。假设LED 实际物理尺寸为Al,则Ac可以表示为:

其中,f0是相机的焦距。则相机接收到的光功率为:

其中,Pt是LED 的发射光功率。

3 FEC-UPSOOK调制方案
目前大部分商用手机摄像头的标准帧率为30 fps,即相机的采样频率fcamera=30 Hz,而LED 的闪烁频率至少为100 Hz 才能不被人眼察觉到闪烁,频率的差距意味着接收机不能完整地把每一个频闪信息记录下来。此外,手机摄像头存在帧率抖动的问题,会造成误码率上升。为实现信息的准确接收,本文提出了FEC-UPSOOK 调制方案,包含帧结构设计,采样自适应阈值解调策略以及针对帧率抖动的纠错机制。
3.1 帧结构设计
FEC-UPSOOK 样本信号波形如图1 所示,由FH(Frame Header,帧头)、多个周期方波信号表示的逻辑1 和多个周期反相方波信号表示的逻辑0 组成。
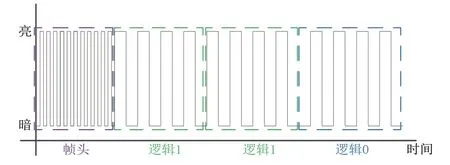
图1 FEC-UPSOOK样本信号波形
逻辑1 和逻辑0 方波信号的频率分别用fmark、fspace表示,满足:

相位分别用θmark和θspace表示,且满足θmark=0°、θspace=180°。此外,帧头也是一个方波信号,其频率fFH满足fFH≫fcamera(fFH≥20 kHz)。由于相机的采样信号是具备一定持续时间的矩形方波信号,这段持续时间称为曝光时长(Exposure Time),因此相机采样到的帧头符号的亮度会低于正常高电平的亮度(“全亮”状态)且高于正常低电平的亮度(“全暗”状态),称为“半亮”状态。三种状态如图2 所示:
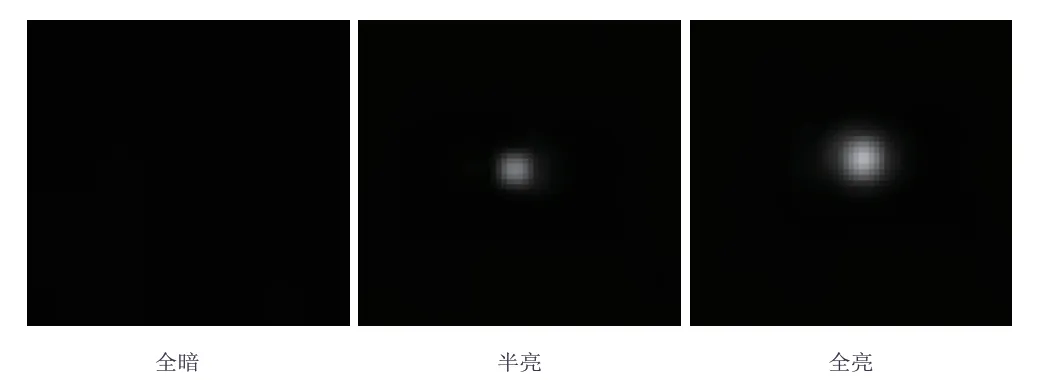
图2 相机采样到的LED的亮度(全暗、半亮、全亮分别对应逻辑0、帧头、逻辑1)
在采样过程中,每个视频帧样本代表一次采样,但由于相机是随机采样,可能会出现图3 所示的两种采样情况,造成接收端无法确定采样到的“全亮”状态是逻辑1 还是由于收发端相位差造成反向的逻辑0。例如,图3 中第三个符号采样2 的值是“全亮”,第四个符号采样1 的值也是“全亮”,但是这两个符号对应的逻辑值完全相反,因此需要一种策略来消除这种相位不确定性。
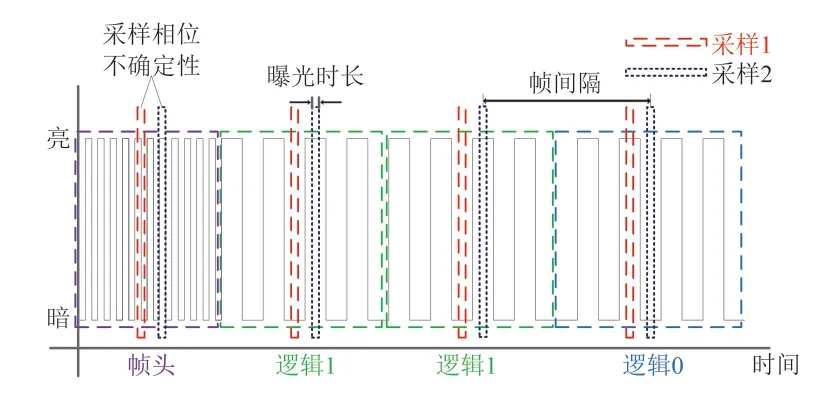
图3 两种可能的采样情况
基于此,本文设计了一种帧结构如图4 所示,包含SFD(Start Frame Delimiter,帧分隔符)、数据位和校验位。

图4 系统帧结构
SFD 由FH 和标志位合并而成,是消除相位不确定性的关键。每个SFD 由两个符号组成:第一个符号是FH;第二个符号是标志位,是频率为fmark的方波信号,符号周期为1/fcamera,其信号波形与逻辑1 的信号波形相同。对于接收机而言,只需要检查SFD 的标志位就可以判断是否存在由相位不确定性引起的误差。如果SFD 中的标志位是“全亮”,这意味着相位不确定性不会引入误差;但是如果标志位是“全暗”,就意味着相位不确定性会带来误差,后续数据帧中所有的信号逻辑值都应该与接收到的逻辑值相反。
除帧分隔符和数据位之外,每一帧结尾还有一位偶校验位,是为了纠正由于帧率抖动造成的误码,具体将在第3.3 节的纠错机制中详细介绍。
3.2 自适应阈值解调策略
发送端按照上述帧结构发送数据后,接收端需要对每个发送符号采样,然后通过采样的亮度值来判断其逻辑值,从而实现解调。然而在实际中,收发端之间距离和角度的差异会造成采样亮度值的浮动,因此本文设计了一种自适应阈值解调策略来消除这种影响。首先,为了避免采样误差,需要采集每一帧图像中以LED 像素中心为圆心的一定区域的亮度值,而根据式(3),LED 投影尺寸的大小和收发机距离的平方成反比,在不同距离下由于LED 投影尺寸的不同,选取的区域大小需要具备一般性或自适应性,为了减少计算量,通过多次试验得到区域大小与误码率的关系具体如表1 所示:
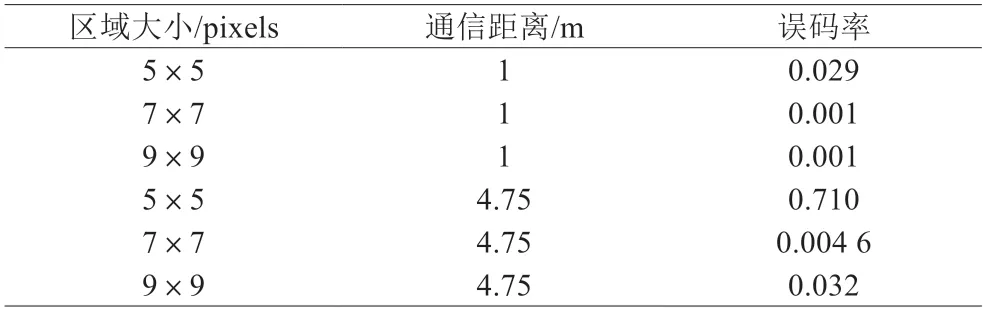
表1 区域大小与误码率的关系
因此,首先计算每一帧图像中以LED 像素中心为圆心的7×7 像素点亮度值之和如下:
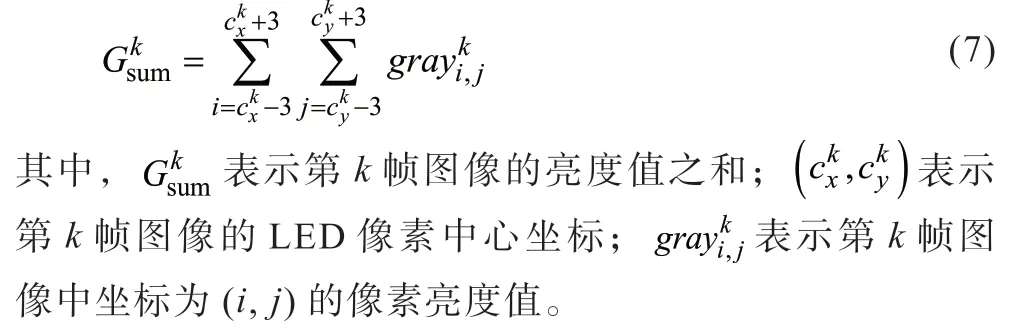
假设每一帧数据由N帧图像组成,即包含符号个数为N,其中必定包含“全暗”、“半亮”、“全亮”三种状态,因此为了计算区分这三种状态对应亮度值范围的阈值,本文选取了起始的M帧(M>N)图像来计算阈值。首先将M帧图像的亮度值之和从小到大排序,得到升序的亮度值序列Gsorted,对Gsorted中的元素逐个作差,得到差值序列,其中第i个值为:
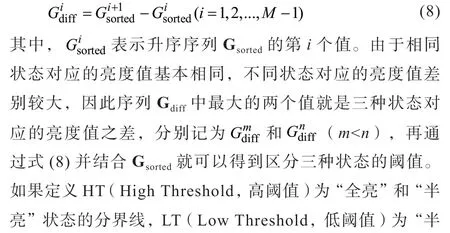

其中,Dk表示第k帧图像解调得到的数据,“1”、“2”、“0”分别表示逻辑1、帧头和逻辑0。将Dk按顺序存入解调序列S 中,即S={D1,D2,D3…}。
3.3 针对帧率抖动的前向纠错机制
对于欠采样通信系统而言,收发端频率是否同步是一个关键问题。如果发送端的信号频率fmark和fspace不能满足式(6),就有可能造成误码性能的严重损伤。由于设备参数并非完全理想,手机摄像头通常存在帧率抖动的问题,尽管抖动的幅度很小,但是对于同步要求高的系统而言仍然会造成误码。具体表现为:在实际系统中,某一个采样值会先跳变到“半亮”状态,之后的采样值也会与原本的采样值状态相反,从而产生误码。
图5 展示了一种典型帧率抖动造成接收误码的波形图。从第二个符号开始因帧率抖动采样点产生偏移,到第三个符号时,采样值先从“全亮”状态跳变到“半亮”状态,然后第四个符号的采样值从“全暗”状态跳变到“全亮”状态,因此帧率抖动会严重影响系统的误码性能。
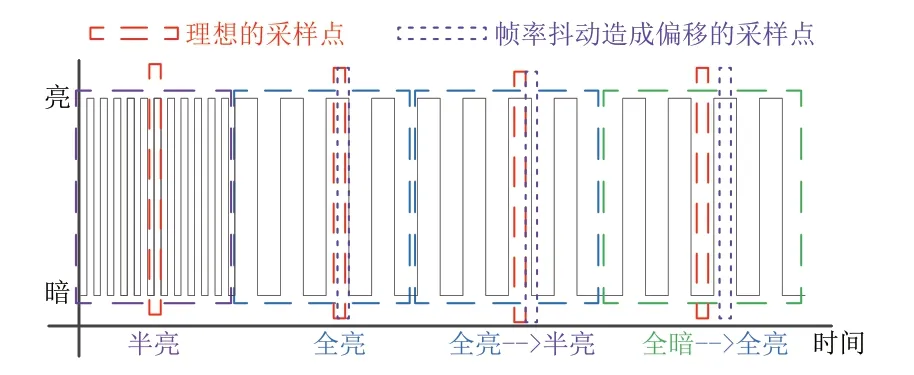
图5 实际系统中帧率抖动造成的误码示意图
本文针对这种情况设计了一种前向纠错机制,图6展示了该机制的整体流程。对于已解调的数据序列S 而言,如果其中相邻帧头,如第i个帧头FHi和第i+1 个帧头FHi+1之间的符号个数小于N,说明存在误码,接下来判断相间帧头FHi和FHi+2之间的符号个数,如果仍然小于N,说明FHi+1和FHi+2都是因误码形成的“帧头”,无法判断具体的跳变情况,则抛弃这一段数据;如果FHi和FHi+2之间的符号个数等于N,说明FHi+1就是由于帧率抖动而造成的误码,需要将其还原成数据,但是此时仍不清楚FHi+1是由逻辑1 还是逻辑0 跳变而成的。因此,首先假设其是由逻辑1 跳变而成的,将其还原成逻辑1,并且把后续的数据全部变成相反的逻辑值,然后再结合标志位来判断所有的数据是否满足偶校验的规则,即数据位以及偶校验位中是否包含偶数个逻辑1。如果满足偶校验,说明假设正确;反之,如果不满足偶校验,说明假设错误,需要将FHi+1还原成逻辑0 并将后续数据取反。
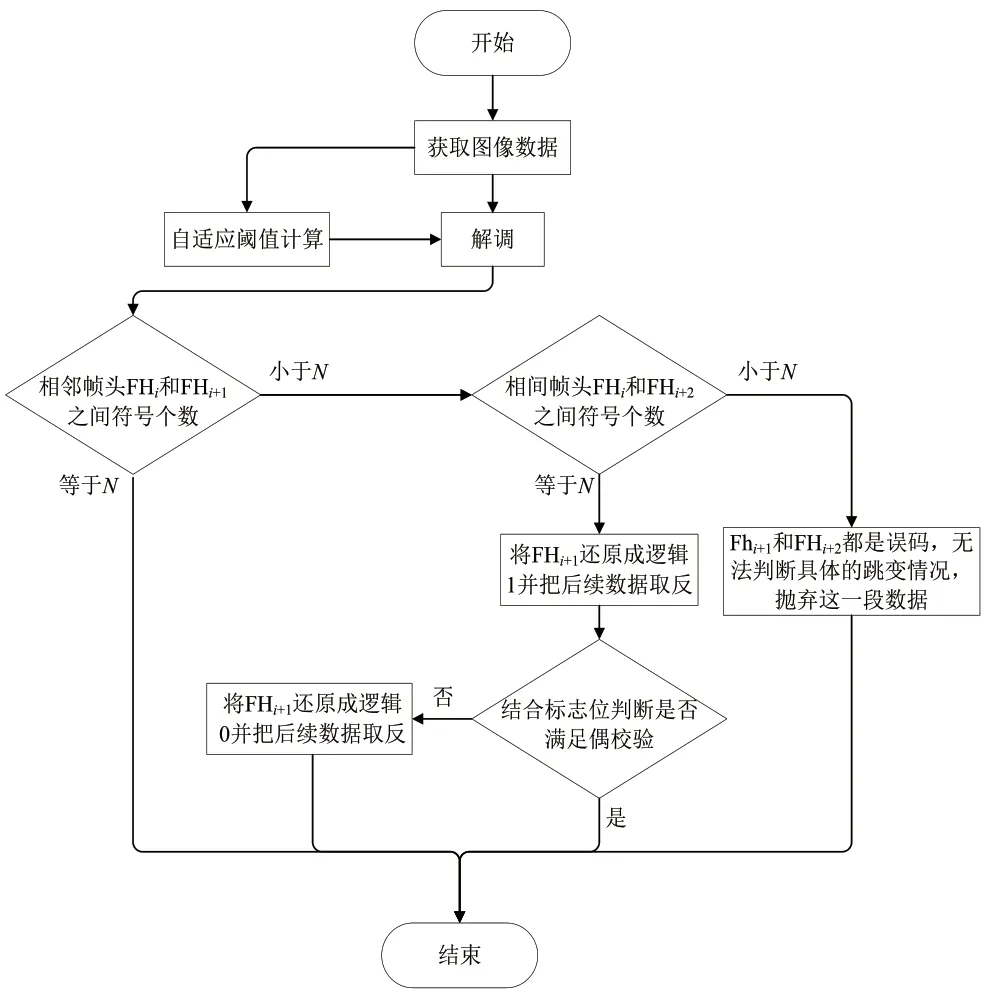
图6 针对帧率抖动设计的前向纠错算法流程图
4 实验平台设计与搭建
4.1 硬件系统
平台硬件系统结构如图7 所示,主要包括发送端和接收端两个部分。

图7 硬件系统结构图
发送端通过PC 产生数据,编码封装后通过USB 连接Arduino 开发板对数据包进行调制,由于Arduino 板输出电压有限,因此需要为LED 设计专门的驱动电路,将调制控制信号转换为符合LED 伏安特性的电信号。LED驱动主要由DD312 芯片组成,该芯片是一颗低成本高性能恒定电流的LED 驱动芯片。LED 光源选用普通的商用白光LED。
接收端由手机摄像头和接收端PC 组成。摄像头使用的是荣耀V20 手机后置摄像头,利用手机自带的专业录像模式录制视频,并传送给接收端PC 完成解调、纠错和解码等任务。
4.2 软件系统
平台的软件系统结构如图8 所示:
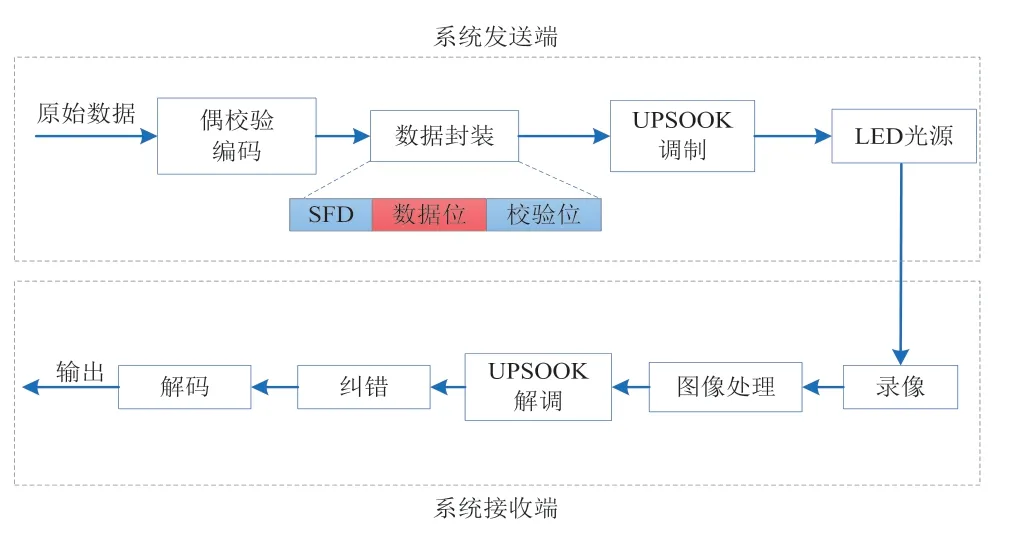
图8 软件系统结构图
发送端软件包括编码单元、数据封装单元、调制单元等。数据封装单元将SFD、数据位及校验位封装在图8所示的数据包结构中,这些数据经过UPSOOK 调制后通过LED 光源发送至接收端。
接收端软件主要由图像处理单元、解调单元以及纠错解码单元组成。图像处理单元使用OpenCV(Open Source Computer Vision Library,开源资源计算机视觉库)先对视频流中每帧图片进行灰度化、二值化等一系列处理,进而实现LED 图像的轮廓识别和像素中心定位,再利用上文所提的自适应阈值解调策略和前向纠错机制进行解调及纠错,待纠错完成后进行解码就可以得到原始数据并与发送端数据进行计较,从而计算误码率。
5 实验设计与结果分析
下面对基于传统UPSOOK 和FEC-UPSOOK 调制方案的可见光通信系统(以下简称UPSOOK 系统和FECUPSOOK 系统)进行性能测试。表2 为系统发送端和接收端的相关参数设置,为了避免环境光和噪声干扰,接收端的曝光时间和感光度(ISO)分别设置为其可支持的最小值1/4 000 s、100。为了保证结果的准确性,通过在同一个位置进行多次重复实验,取误码率的平均值作为当前距离或角度下的误码率。
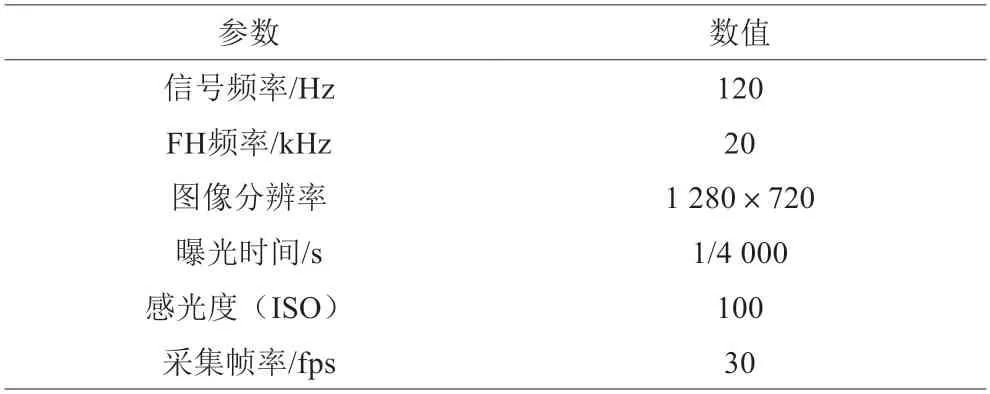
表2 相关参数设置
5.1 不同传输距离下误码性能测试
图9 展示了两种系统误码率随传输距离变化的曲线。收发机朝向平行,发射机辐射角为0°。发送端通过LED发送10 000 bits 二进制数据,接收端通过手机摄像头接收信号,并将图像数据传输给接收端PC 进行处理。可以看出,FEC-UPSOOK 系统误码率性能始终优于UPSOOK通信系统误码率性能。当距离小于3 m 时,UPSOOK 系统误码率保持在10-1左右,这种情况下无法实现正常通信,而FEC-UPSOOK 系统的误码率下降至10-3左右;当距离大于3 m 时,两系统误码率均有所上升,但FECUPSOOK 系统误码率仍低于UPSOOK 系统的误码率,说明了本方案的有效性。
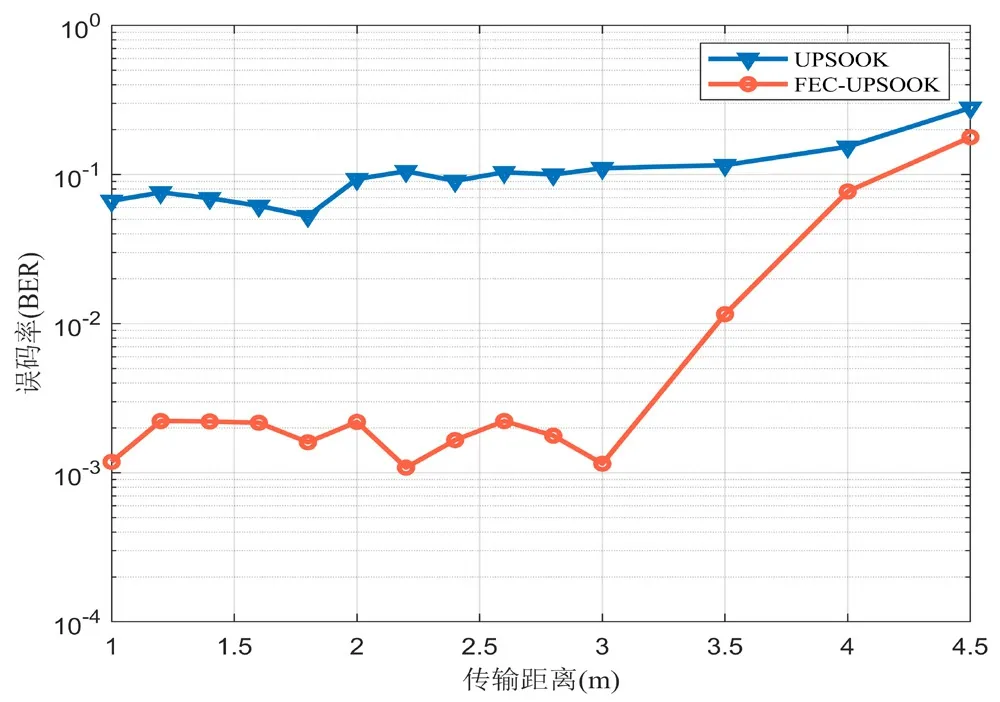
图9 不同传输距离下误码率对比
图10 展示了FEC-UPSOOK 系统中使用不同功率LED 时的误码率变化情况。可以看出,在本系统中使用发射功率更大的发射机可以获得更好的误码性能。当传输距离大于3 m 时,使用功率为65 mW 的LED 的通信系统误码率明显上升;当传输距离为5 m 时,误码率接近50%。而使用功率为130 mW 的LED 的通信系统误码率保持在10-2以下,且距离越大时性能提升越明显。
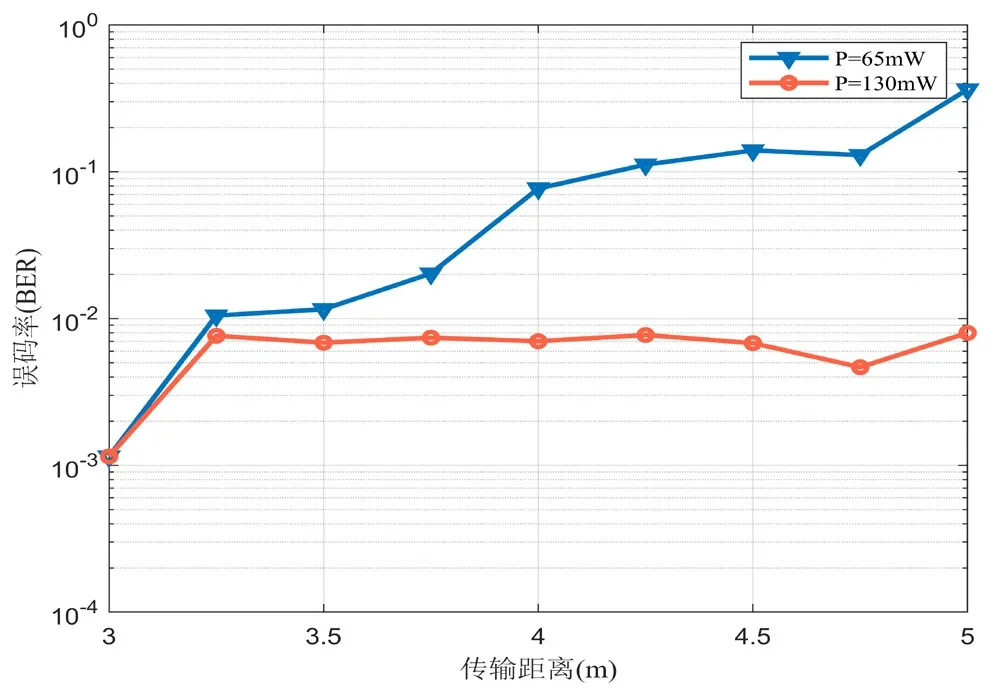
图10 使用不同功率LED误码率对比
5.2 不同辐射角度下误码性能测试
为了验证当收发机朝向存在一定角度时本系统是否能够正常通信,测试了发射机辐射角10°~80°的系统误码率。
角度性能测试场景示意图如图11 所示。典型室内场景天花板的高度约为2.8 m,人体坐高约为0.8 m,因此固定收发端传输距离为2 m,LED 平面法向量与收发机连线的夹角为辐射角θ。
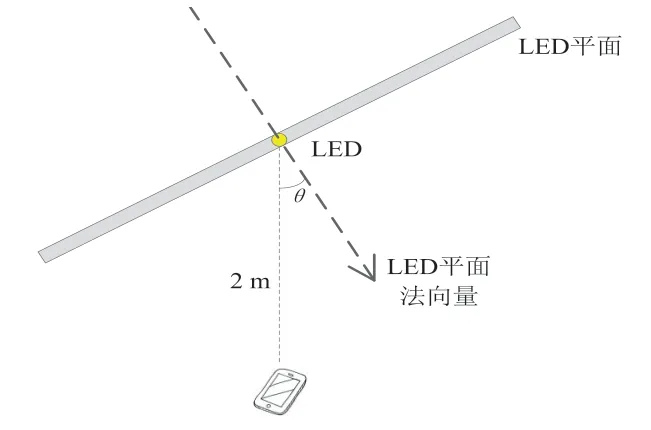
图11 角度性能测试场景示意图
图12 展示了FEC-UPSOOK 和UPSOOK 两种通信系统误码率随θ变化的曲线:
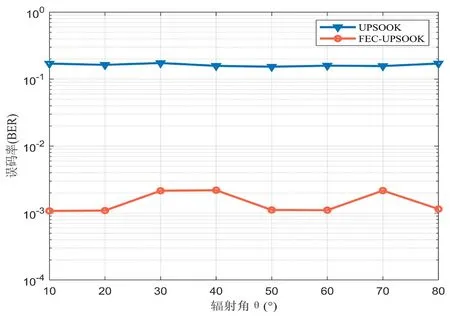
图12 不同辐射角度下误码率对比
在10°~80°的测试角度范围内,FEC-UPSOOK 系统误码率保持在10-3左右,而UPSOOK 系统误码率保持在10-1以上,这说明本文提出的FEC-UPSOOK 调制方案在辐射角度变化时也能有效提高误码性能,进而验证了在一些实际场景中收发机朝向存在一定角度的情况下本系统的可靠性。
6 结束语
本文针对手机摄像头帧率不稳定限制通信可靠性的挑战提出了FEC-UPSOOK 调制方案,设计并实现了基于UPSOOK 的系统帧结构、自适应阈值计算策略和前向纠错机制。此外,还搭建了一套基于手机摄像头的可见光通信系统,并在不同距离和不同辐射角度下对系统的误码性能进行了测试。结果表明,本方案能明显提升系统误码性能,相比于UPSOOK 系统,FEC-UPSOOK 系统误码率从10-1下降到10-3,并且当发射机辐射角在0°~80°时,误码率仍保持在10-3左右,验证了本方案的有效性。
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
雷达与对抗(2022年1期)2022-03-31
石家庄铁路职业技术学院学报(2021年1期)2021-06-09
新能源科技(2021年6期)2021-04-02
科学技术创新(2021年7期)2021-03-23
铁道通信信号(2019年2期)2019-03-26
电子制作(2018年11期)2018-08-04
电信科学(2016年9期)2016-06-15
单片机与嵌入式系统应用(2014年7期)2014-03-24
铁路通信信号工程技术(2014年3期)2014-02-28