纯电动城市客车动力系统匹配设计及仿真分析
2022-06-28 09:13:44张利新刘逸群明杰婷
客车技术与研究 2022年3期
张利新,刘逸群,明杰婷
(中车时代电动汽车股份有限公司,湖南 株洲 412007)
纯电动城市客车动力系统相关参数的匹配设计极其重要。根据整车动力性、经济性等性能指标的设计需求,对动力系统相关部件(主要包括驱动电机和动力电池)进行详细的计算和匹配选型。再利用 Cruise 软件搭建车辆动力学模型,联合 Simulink 开发的控制策略模型,进行多种工况的整车动力性能和经济性能仿真分析,验证动力系统参数匹配设计的合理性。
1 动力系统参数匹配设计
1.1 车辆参数及设计需求
该纯电动城市客车采用直驱方案,整车参数及设计需求如下。
1) 车辆参数:满载质量为15 000 kg,风阻系数为0.7,迎风面积为7 m,主减速比为6.14,滚动半径为0.512 m,滚动阻力系数为0.012。
2) 设计需求:加速时间(0~50 km/h)小于20 s,最高车速小于69 km/h,最大爬坡度tg大于15%,续驶里程(CCBC工况)大于250 km。
1.2 驱动电机匹配设计
1) 根据最高车速确定的电机峰值功率:

式中:为传动系效率,取0.9。
2) 根据最大爬坡度确定的峰值功率:

式中:为通过最大爬坡度时要求的车速,取15 km/h。
3) 根据车辆加速时间确定的峰值功率:

式中:为汽车旋转质量换算系数,取1.05;为加速末速度,取50 km/h;为行驶加速度,其值为50÷36÷20=0694(m/s)。
4) 峰值功率:
≥max[,,]=145 kW
5) 额定功率:
==72 kW
式中:为电机过载系数,一般取值范围为2~3。
6) 电机的最高转速应满足最高车速的要求:
≥··0377=2 195 r/min
式中:为变速器速比,取值1;取6.14。
7) 驱动电机的额定转速:
≥=1 097 r/min
式中:为电机扩大恒功率区系数,一般取值范围为2~3。
8) 电机的额定转矩:
=9 550=6268 N·m
式中取1 097 r/min。
9) 车辆低速行驶可通过最大爬坡度时的加速通常取0,此时电机峰值转矩有两种算法,一种是:

式中:为通过最大爬坡度时要求的车速,取15 km/h。
另一种是:≥9 550·
式中:的计算为前述1.2中的2);为通过最大爬坡度时的速度对应的电机转速,=··(0377·)=477 r/min。
经过公式推导,这两种算法结果完全一致,即=2 174 N·m。
1.3 动力电池匹配设计
通常纯电动城市客车动力电池组数量的确定主要受续驶里程和行驶功率两个因素的影响。
1) 根据续驶里程的要求确定电池组的总电量。


式中:为车辆以40 km/h匀速行驶时所需要的功率;为车辆续驶里程;为电池的放电深度,取0.8;为电机和电池控制器的工作效率,取0.9;为传动系统效率,取0.9。
2) 所需电池数目:
=1 000 W/(··)≈373
式中:为一组串联电池的额定容量,即为单体电池的额定容量(本文为151 Ah);为单体电池额定电压,取3.22 V;为电池放电效率,取0.98。
3) 电池串联数目:
==598 V÷3.22 V≈ 185.7
式中:为电池系统电压,取598 V。
4) 电池并联数目:
≥=302 Ah÷151 Ah=2
式中:为电池系统额定容量,取302 Ah。
5) 电池系统的放电功率需满足电机及其他高压部件的峰值功率要求。根据1.2中的4)计算出电机功率=145 kW,再考虑DC/DC、油泵、气泵、空调等高压部件的工作能耗,取电池可持续放电功率不低于180 kW。
6) 以540 V电压平台估算放电电流:
≥=180 kW÷540 V≈333 A
1.4 最终匹配计算结果
根据1.2及1.3的计算,最终取驱动电机的额定功率为80 kW、峰值功率为150 kW、峰值扭矩为2 500 N·m、峰值转速为2 400 r/min。
动力电池的单体额定容量为151 Ah,电池成组方案为2并186串,系统总能量为180.87 kW·h。
2 联合仿真分析
2.1 Cruise模型建立
利用AVL Cruise平台建立车辆动力学仿真测试模型,如图1所示。采用分层建模的方法,可以将不同的系统总成元件搭建在用户自己设定的不同层中,使得建模过程更加直观和便捷。模型主要包含车身、底盘、高压系统、低压系统、整车控制5层,将车辆参数、电机参数、动力电池参数导入到Cruise对应部件模型中,完成仿真模型参数配置。

图1 Cruise车辆仿真测试模型架构
2.2 Simulink 控制策略模型建立
电机扭矩控制策略原理如图2所示,通过获取驾驶员的驾驶意图,计算出电机需求的安全驱动或制动扭矩。同时,为防止扭矩突变影响驾驶体验感,还需对电机扭矩进行滤波处理。再将最终的电机扭矩通过CAN发送给电机控制器,来控制电机的驱动或制动能量回收。
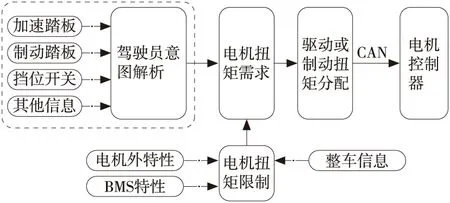
图2 电机扭矩控制策略原理
Simulink电机扭矩控制模型架构如图3所示,主要包含踏板扭矩解析、滑行回馈扭矩计算、电机扭矩仲裁、电机扭矩限制、扭矩滤波等控制模块。
将整车Cruise模型作为被控对象集成到Simulink模型的Cruise Interface模块中,并与Simulink原有模块的输入和输出形成闭环控制(如图3所示),来进行整车动力性与经济性联合仿真分析。

图3 Cruise-Simulink联合控制模型架构
2.3 联合仿真分析结果
1) 最高行驶车速。通过Cruise最高行驶车速计算任务仿真测试后,最高车速为75 km/h,达到国标对城市客车最高车速的要求,并需要采取控制策略对电机驱动扭矩进行限制,以满足我司车辆最高限速69 km/h的设计要求。
2) 最大爬坡度。根据国标要求,车辆在满载的情况下进行最大爬坡度仿真测试。Cruise爬坡度计算任务仿真测试结果如图4所示,最大爬坡度为19.2%,满足车辆设计要求。

图4 最大爬坡度仿真结果
3) 加速时间。在车辆满载质量的条件下进行加速性能仿真测试,通过Cruise仿真测试车辆0~50 km/h的起步加速时间,结果如图5所示,加速时间为11.2 s,满足车辆设计要求。

图5 加速时间仿真结果
4) 电耗。在车辆满载条件下,分别进行中国典型城市公交(CCBC)工况与40 km/h等速工况经济性仿真测试,测试结果如图6和图7所示。CCBC工况下车辆百公里能耗为50.48 kW·h,40 km/h等速工况下车辆百公里能耗为36.2 kW·h。

图6 CCBC工况仿真结果
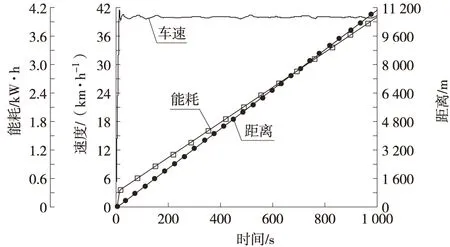
图7 40 km/h等速工况仿真结果
5) 续驶里程。电池SOC均从100%开始测试,仿真结束时电池SOC为15%,经过换算CCBC工况车辆续驶里程为303 km,40 km/h等速工况车辆续驶里程为422 km,满足车辆设计要求。
3 结束语
本文利用 Cruise 软件搭建车辆动力学模型,再联合利用 Simulink 开发的电机控制策略模型,进行多种工况下的整车动力性能和经济性能仿真分析。仿真结果表明,各项性能指标均满足我司车辆设计要求并总体验证了动力系统主要参数匹配、车辆仿真模型以及电机控制策略模型的有效性,为后续整车产品的研发提供参考。