基于声音阵列和图像处理的皮带机跑偏检测系统
2022-06-27 01:23王艳
测控技术 2022年6期
王 艳
(秦皇岛市计量测试研究所,河北 秦皇岛 066099)
皮带运输机是运用皮带运输物料的机械,在冶金、矿山等行业被广泛应用。皮带运输机运行时皮带跑偏是最常见的故障,跑偏的根本原因是皮带宽度方向的合力不为零或皮带宽度垂直方向的拉力不均匀,造成这种现象的原因主要有以下几种:① 因皮带运行时间太长导致内部组织结构不均匀;② 长期不清理导致皮带表层结垢严重;③ 滚筒不平造成皮带跑偏;④ 皮带上运输物料分布不均匀。皮带跑偏会引起系统故障停机,影响生产作业效率,也会造成设备中主要部件的非正常损坏,甚至会增加安全事故发生的概率。现有的基于图像处理的皮带机跑偏检测系统虽然可以检测出皮带跑偏,但大多存在识别速率慢和识别精度差的问题,而且由于工况导致拍摄图像失真,使误报率较高,严重影响了皮带机跑偏检测系统的可靠性。综上所述,目前还缺少一种可以在恶劣工况下进行皮带机跑偏检测,同时具有低故障误报率以保证其可靠性的皮带机跑偏检测系统。
声源定位技术利用声波的传播和声音信号的特点来测定声源的位置和距离。随着科技的发展和社会的进步,声源定位技术被广泛应用于各种场景[1-6]。经过多年发展,声源定位技术逐渐走向成熟,通过麦克风阵列接收声音信息估计声源位置是声源定位的主要方式,其方法一般被归为3类:① 波束形成[7-8],对麦克风阵列采集的声音信号预处理,得到声压信号后延时求和,将1个平面的声压分布进行成像可视化,此类方法鲁棒性强,不需要先验知识,使用简单直观。② 声全息[9-10],根据被测物的声场数学模型,麦克风阵列采集多点声压值,重构整个声场信息,此类方法对低频声源也有很好的分辨力。③ 参数测量[11-13],通过声源的位置信息参数构建函数关系求解声源位置,例如到达时间差(Time Difference of Arrival,TDOA)、波达方向(Direction of Arrival,DOA)、接收信号强度(Received Signal Strength,RSS)等。目前广义互相关-相位变换(Generalized Cross Correlation-Phase Transform,GCC-PHAT)时延估计算法在声源定位中展现出了其优越的性能和发展空间。
综上所述,解决皮带机在运行过程中的跑偏,可采用机械的故障诊断和噪声分析方面的知识,故笔者提出了一种基于声音阵列和图像处理的皮带机跑偏检测系统。在硬件设计方面,合理考虑各个设备和皮带机的构造,在不影响皮带机正常运作的情况下进行跑偏检测;在软件设计方面,将声源定位技术和图像处理技术相结合,保证皮带跑偏的故障诊断的准确性。进一步将声源定位与卷积神经网络(Convolutional Neural Network,CNN)[14]结合输出定位结果,并将图像处理和支持向量机(Support Vector Machine,SVM)结合进行故障程度分类,同时仿真验证了所设计系统的可行性和准确性。
1 系统方案
基于声音阵列和图像处理的皮带机跑偏检测系统的硬件结构示意图如图1所示。工业摄像机安装在相机底座上,用于拍摄异常声源位置图像,为保证其拍摄角度的灵活性,相机底座通过电机驱动轴驱动,并与皮带机支架固定在一起,置于皮带机的上方。麦克风阵列和鉴频器被置于皮带机的上方分别用于拾取声音信号和鉴频识别。工业摄像机、麦克风阵列、电机与上位机系统相连接。
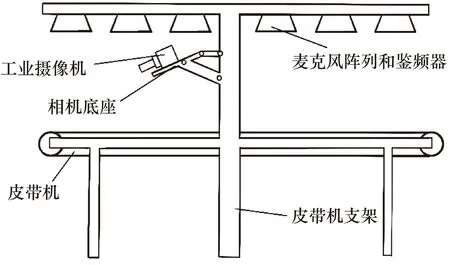
图1 基于声音阵列和图像处理的皮带机跑偏检测系统的硬件结构示意图
1.1 系统软件组成
基于声音阵列和图像处理的皮带机跑偏检测系统的软件组成分为3个模块,即异常声源检测与定位模块、图像采集与处理模块和报警处理模块,系统构成如图2所示。

图2 基于声音阵列和图像处理的皮带机跑偏检测系统构成
基于声音阵列和图像处理的皮带机跑偏检测系统工作流程如图3所示。首先,使用麦克风阵列拾取声音信号,通过鉴频器对异常声音进行鉴频识别,并通过麦克风阵列检测出现异常频率声音的位置;其次,通过可调角度的工业摄像机根据异常声源位置自动调节角度,拍摄异常位置照片,并将照片传送到上位机;最后,进行图像分析与处理,提取皮带特征,结合SVM来判断皮带是否跑偏和跑偏的严重程度,并将判断结果发送到报警系统,报警系统根据故障诊断结果选择执行不同的报警方案。

图3 基于声音阵列和图像处理的皮带机跑偏检测系统工作流程
1.2 基于麦克风阵列的声源检测与定位系统
基于麦克风阵列的声源检测与定位系统工作原理如图4所示。使用麦克风阵列拾取声音信号,并对声音信号进行滤波和放大处理,通过鉴频器对放大后的声音进行鉴频识别,判断是否有指定频率范围的信号,从而实现对异常声音的检测。

图4 基于麦克风阵列的声源检测与定位系统工作原理图
基于平面直角坐标系建立麦克风阵列的声源定位基本模型,如图5所示。
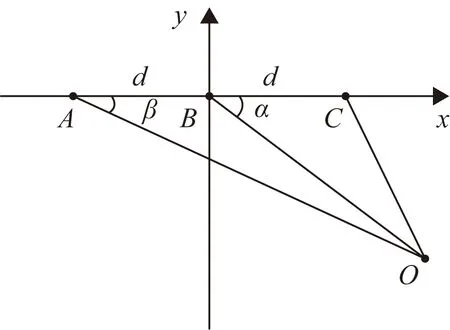
图5 麦克风阵列的声源定位基本模型
其中皮带机产生的异常声源点为O,选取阵列中的麦克风①~麦克风③分别位于A、B、C,间距设为d,即AB=BC=d,α为OB与x轴的夹角,β为OA与x轴的夹角。对异常声音定位使用基于时延差的麦克风阵列声源定位算法,由余弦定理可得:
OC2=OB2+d2+2d·OB·cosα
(1)
OA2=OB2+d2-2d·OB·cosβ
(2)
若皮带机工作环境的声速vs已知,取麦克风①和麦克风②在接收声源信号后的时延差为τAB,麦克风②和麦克风③在接收声源信号后的时延差为τBC,则有:
OC=OB+vs·τAB
(3)
OA=OB-vs·τBC
(4)
由式(1)~式(4),解得
(5)
(6)
根据异常声源到达不同麦克风的时间差,转换为对应的声程差,通过声源定位算法计算得到异常声源的位置。其中对时间延迟τ的估计采用广义互相关算法[15],此算法在频域内给予加权,从而对信号和噪声进行白化处理,求取信号间的互功率谱,增强信噪比高的成分,抑制噪声的影响,通过时域变化得到信号间的广义互相关函数并提高时延估计的精度。
皮带机的工作环境中存在的混响会产生噪声,为减小影响选择相位变换加权[16]作为加权函数。
首先对n时刻第p个和第q个麦克风接收到的信号计算其傅里叶变换xp(ω)和xq(ω),然后计算互功率谱为
(7)
对互功率谱进行傅里叶反变换,求得广义互相关函数Hp,q(λ)为
(8)
处理后可简化为
(9)
进一步,对广义互相关函数加权为
(10)
将相位变换的加权广义互相关函数作为训练特征,输入到CNN进行特征训练,CNN构成如图6所示。卷积层负责提取图像特征,激励层负责非线性映射,池化层负责映射特征压缩,全连接层负责连接输出层,输出层使用Softmax函数输出皮带机的声源位置。
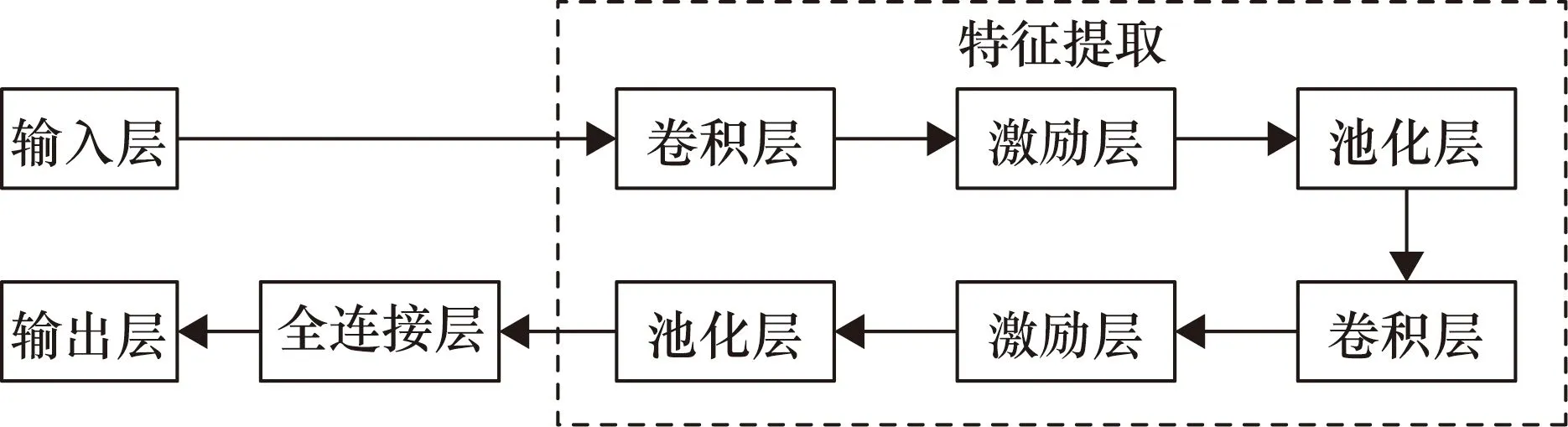
图6 CNN构成
CNN结构网络参数如表1所示,采用2×2最大池化作为CNN中的池化窗口。

表1 CNN结构网络参数
通过一系列的异常声源检测处理后,定位异常声源,同时位于皮带机支架上的工业摄像机自动调节角度到需要位置进行拍摄,并将拍摄照片传回上位机系统。
1.3 基于图像处理的故障诊断系统
基于图像处理的故障诊断系统的工作原理如图7所示。在识别到异常声源后,工业摄像机调整拍摄视角,对异常声源位置进行抓拍,上位机获得摄像机传回的图像后,对图像进行必要的格式转换;然后进行裁切、旋转,以及调整对比度和亮度等一系列预处理步骤;对经过预处理的图像进行图像分割,将传送皮带与背景分割开。
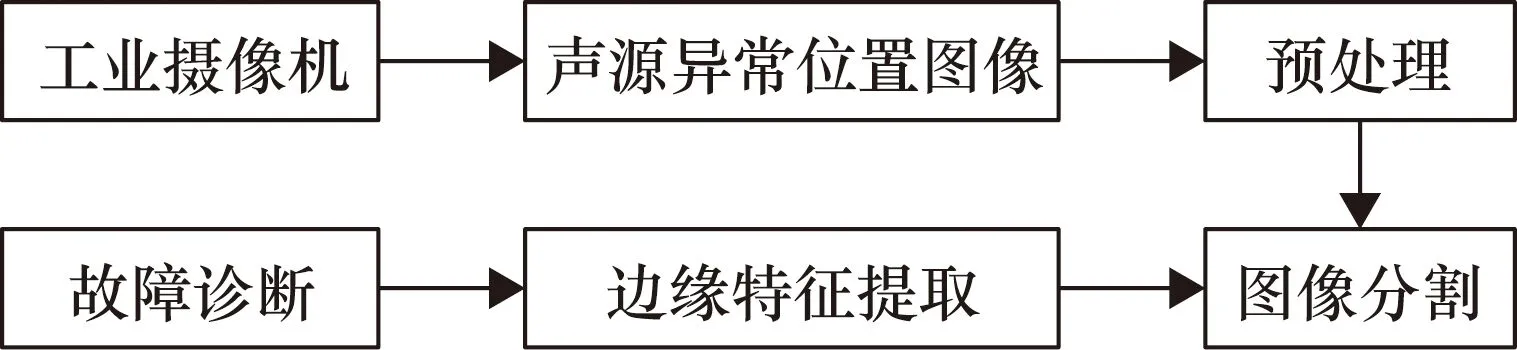
图7 基于图像处理的故障诊断系统的工作原理图
本系统采用灰度平均法来分割图像,根据像素的灰度值进行图像分割,对于一幅像素为M×N的图像,有如下公式:
(11)

(12)

(13)
式中:mf为平均灰度值;u(j)和v(j)分别为列极小值向量和列极大值向量;f(i,j)为像素i、j位置处的灰度图像值。利用列极小值向量u(j)和列极大值向量v(j)计算:
(14)
由mf和muv可得阈值Th为
Th=max(mf,muv)
(15)
进而将获取的皮带机异常声源图像处理为二值图像b(i,j),公式为
(16)
对于二值化的图像,背景表示为“1”,输送带表示为“0”,特征函数为
(17)
式中:g(j)的取值范围为[0,M]。图像分割后进行边缘特征提取,将g(j)中皮带和背景的分界线用线性函数进行拟合,可得两条分界线,定义皮带边缘和其高度方向的夹角为跑偏角,将左侧和右侧拟合线的斜率分别记为k1和k2,根据左右侧分界线分别计算得到皮带边缘和图像边缘的距离d1和d2。
由此可得特征向量为
R=(k1,k2,d1,d2)
(18)
由式(18)可知,可利用跑偏角和偏移量计算皮带机跑偏阈值范围,结合SVM来判断皮带是否跑偏和跑偏的严重程度,并将判断结果发送到报警系统。
本系统采用Canny算子边缘检测提取图像边缘特征,针对经典Canny算子边缘检测算法受环境影响所导致的提取精度差、干扰大的问题进行了优化,共分为以下5个步骤。
① 采用中值滤波代替高斯滤波,平滑故障位置皮带机图像。
② 考虑45°和135°的影响,计算梯度幅值和方向。
③ 对梯度幅值进行非极大值抑制。
④ 用双阈值法进行检测并连接边缘。
⑤ 利用滞后技术跟踪边界。
1.4 报警处理系统
报警系统设定为高低2种级别的声光报警系统,当判断结果为不严重时,启用低级别的报警处理,报警系统利用监控主机的音箱发出报警语音,提醒皮带机出现跑偏现象;当判断结果为严重时,启用高级别的报警处理,在使用监控主机的音箱的同时,启动声光报警器,提醒皮带机出现严重跑偏,急需处理,此时监控主机发出皮带机急停的信号。
2 测试及结果分析
2.1 声源差异性分析
利用麦克风阵列采集皮带机正常声音信号和皮带机空载状态下故障声音信号,严格控制麦克风布置部位,输出两者噪声频谱并进行差异性分析,如图8和图9所示。

图8 皮带机正常运作时声音信号频谱图
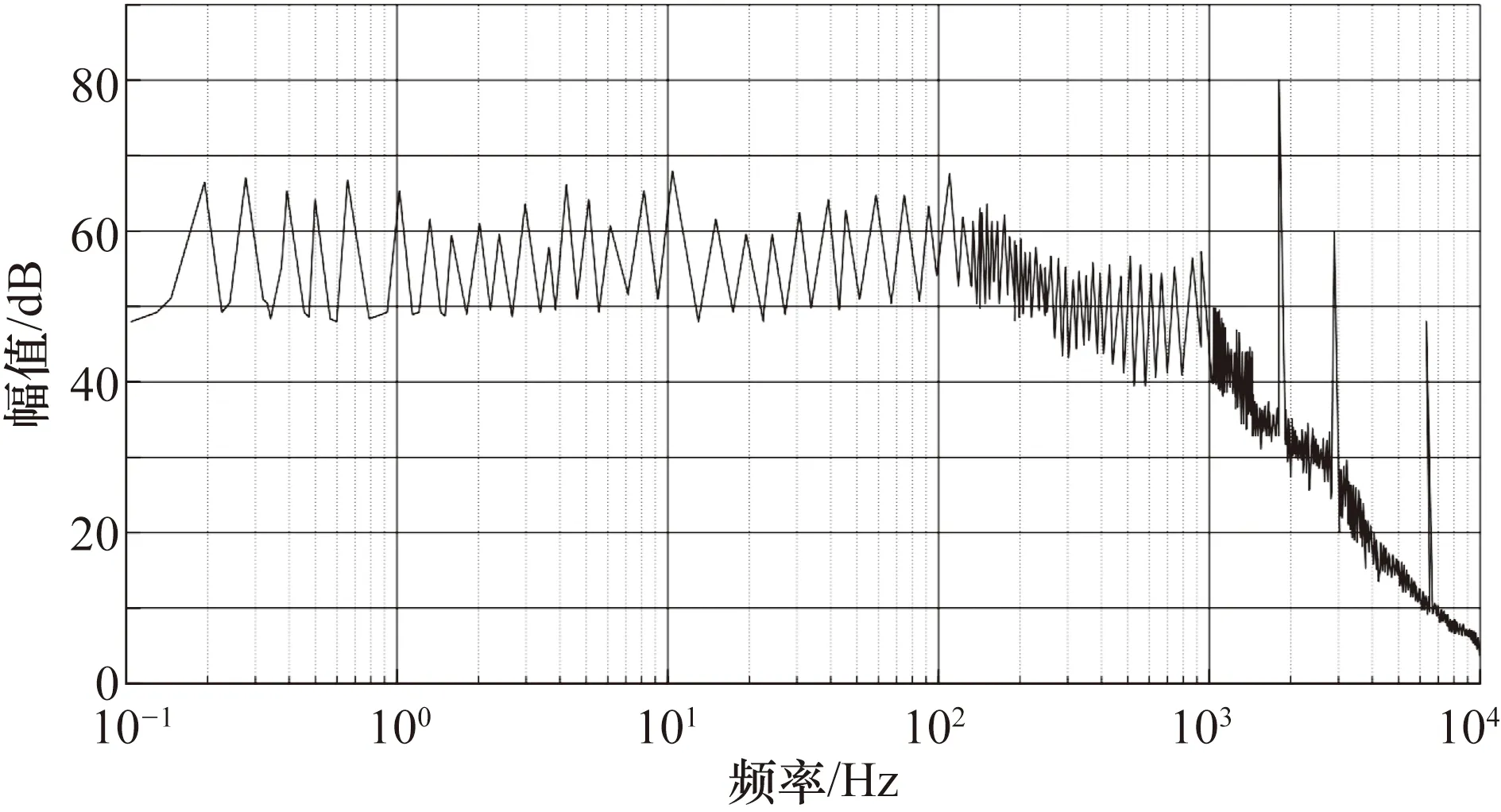
图9 皮带机出现故障时声音信号频谱图
由图9可见,当皮带机出现故障问题时,出现了明显的峰值,声音的强度和频率有明显改变。
2.2 故障声源定位仿真
用MATLAB对皮带机的声音信号进行仿真,采用高斯白噪声作为模拟声源信号,根据语音信号的特点,设定声源O,其采样频率为20 kHz,采样点数为256,生成的故障声音信号如图10所示。设定声速为340 m/s,信噪比为-10,设定麦克风①~麦克风③,且AB、BC的间距设为10 cm,计算信号之间的延迟并转换相差点数,得到麦克风接收的声音信号,其时域图如图11所示。

图10 MATLAB生成故障声音信号
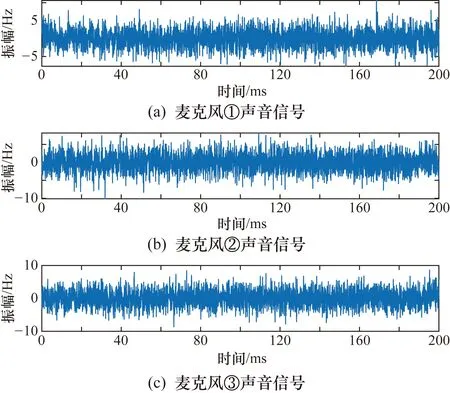
图11 麦克风接收到的声音信号
在对接收到的故障声音信号进行滤波放大预处理后,采用广义互相关算法进行时延估计,在得到广义互相关函数后,根据声音信号的噪声干扰,选择相位变换法(PHAT)作为广义互相关加权函数,并加入高斯白噪声,实现时延仿真的准确估计。
本文设计4种不同深度的CNN结构模型,即LetNet-5的5层结构模型和VGG的9层、11层、13层结构模型,并为其分别配置相应的卷积层和池化层,如表2所示。
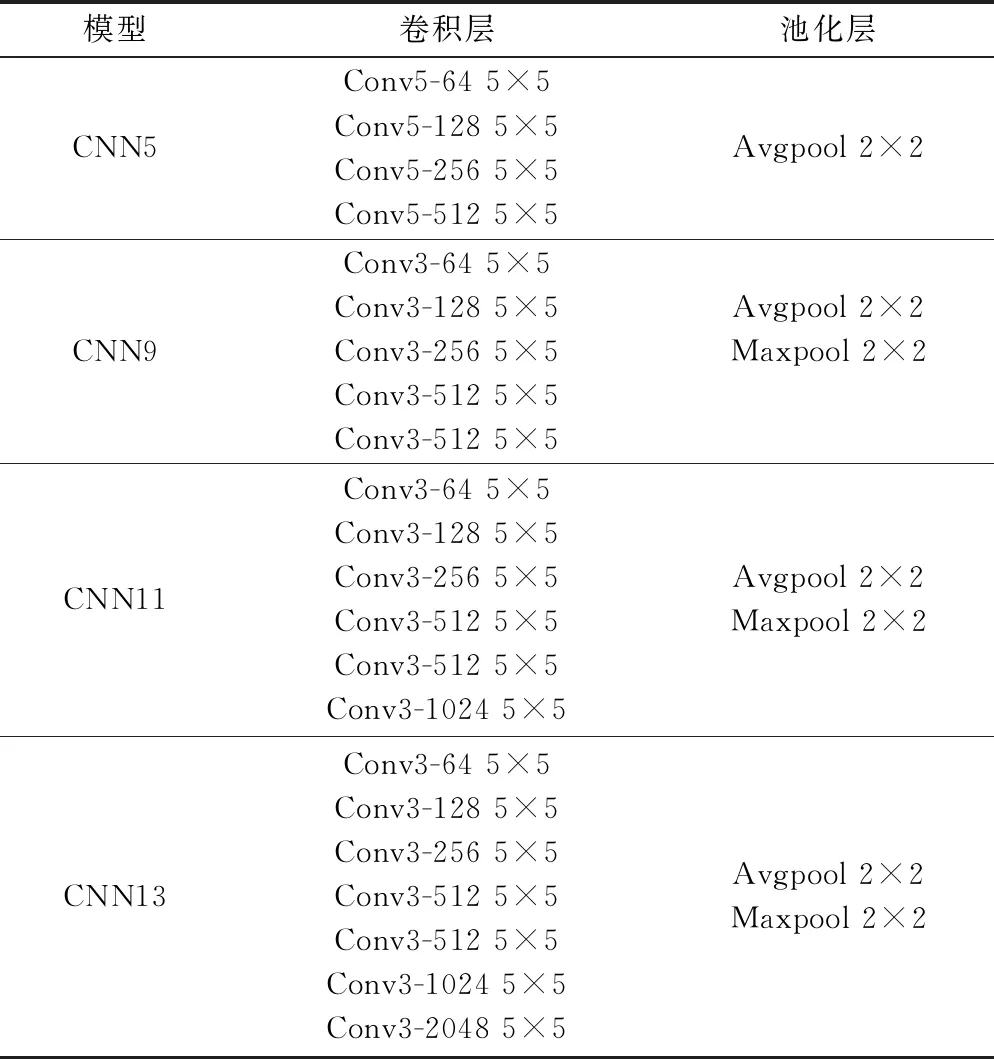
表2 4种不同深度的CNN结构模型配置
在得到估计结果后,将得到的相位变换加权广义互相关函数作为训练特征输入至CNN训练。根据评价指标比较验证4种不同深度的CNN的性能,如表3所示。
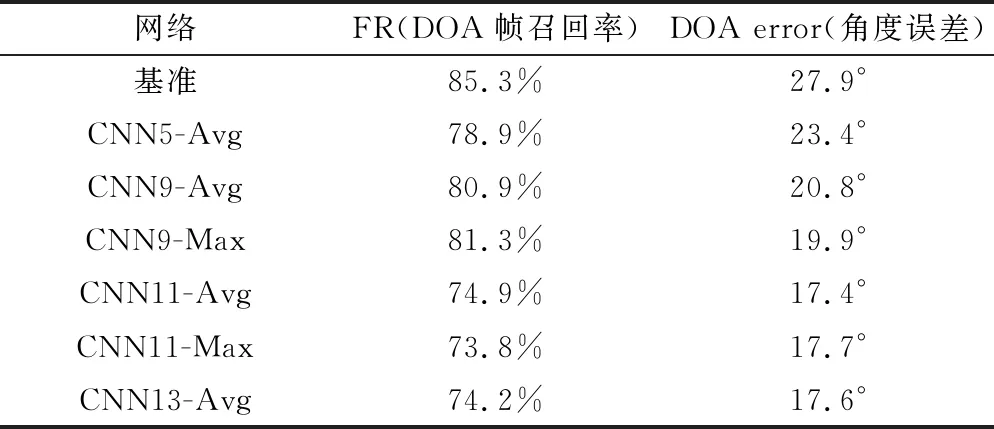
表3 4种不同深度的CNN的性能
由评价指标角度误差(DOA error)可知,深度为5层、9层和11层的CNN结构性能相近,13层的CNN结构存在过拟合现象,经过筛选和比较后,CNN9-Max的网络结构性能最好。
2.3 图像处理仿真
在完成故障声源定位仿真后,接下来实现图像处理的仿真。在MATLAB中编写图像处理程序,利用灰度平均法将输入的RGB图像灰度化后分割,然后再将其二值化处理,RGB图像、灰度图像和二值化图像如图12所示。

图12 RGB图像、灰度图像、二值化图像
在得到灰度图像后,将其转换为灰度直方图,采用Canny算子提取灰度图像边缘特征,用MATLAB进行仿真实验,比较经典Canny算法和改进后的Canny算法,并对实验结果进行比对和分析,皮带机图像效果对比如图13所示。

图13 皮带机图像效果对比
根据仿真结果可知,优化后的Canny算子边缘检测可以检测到更多的边缘细节信息,明显抑制噪声,降低了干扰问题并将传送带和背景分割开,因此可以将皮带机故障位置图像作为输入,准确识别皮带机边缘后,根据跑偏角和偏移量设定跑偏的阈值范围,结合SVM故障诊断,判断皮带机的跑偏程度,跑偏检测结果如图14所示。可以看出优化后的Canny算法可以快速准确地判断出皮带机的跑偏程度。

图14 跑偏检测结果
3 结束语
本文提出了一种基于声音阵列和图像处理的皮带机跑偏检测系统,从硬件和软件2个方面分别进行了设计,采集皮带机故障声源的声音信号进行声源定位后,采集故障声源图像通过图像处理技术判断其故障程度。在声源定位时,对声音信号预处理,采用GCC-PHAT和CNN相结合的方法,降低工作环境产生的噪声影响,减少定位产生的误差。在图像处理时,对声源位置图像预处理,对二值化后的图像图像进行分割,提取边缘特征,利用跑偏角和偏移量得到跑偏阈值,并结合SVM进行皮带机的故障诊断,同时判断故障程度。最后仿真验证了本系统的可行性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
航空学报(2022年2期)2022-03-29
科技信息(2021年7期)2021-02-28
装备维修技术(2020年10期)2020-11-19
科学与财富(2019年15期)2019-10-21
启迪与智慧·上旬刊(2019年5期)2019-09-10
作文·初中版(2019年8期)2019-09-09
发明与创新·中学生(2019年1期)2019-03-23
魅力中国(2017年2期)2017-05-13
集装箱化(2009年8期)2009-09-21