
具有故障存储功能的数字化IGBT驱动器的设计
2022-06-27 12:35杨春宇郑松
电子产品世界 2022年6期
杨春宇 郑松







关键词:存储;数字化;IGBT;驱动器
大功率绝缘栅双极型晶体管(insulatedgatebipolartransistor,IGBT)在轨道交通牵引变流器、辅助变流器、充电机等核心设备中得到了广泛的应用。IGBT驱动器是控制装置与IGBT模块之间的桥梁,决定着IGBT能否正常、安全、可靠的工作,是执行控制算法的关键部件。为了实现对IGBT更加精准、智能的控制以提高系统的效率以及可靠性,带有可编程逻辑器件的数字化驱动器已得到了越来越多的应用。
IGBT部件的可靠性严重影响着车辆的运行秩序。变流器中IGBT故障后车辆只能通过切除部分动力或部分负载来维持运用,严重影响车辆运行与乘客乘坐。目前的IGBT驱动器虽然具有故障检测保护与故障反馈功能,但通过故障反馈却无法甄别故障类型,亦不能指示IGBT故障前后驱动器各部分信号或逻辑,造成故障的根本原因很难分析。因此,有必要设计带有故障存储功能的IGBT驱动器,为故障的定位与分析提供有利的数据支撑。
1数字化驱动器总体方案设计
数字化驱动器以可编程逻辑器件为核心,包括电源系统、信号处理与故障保护系统、门极开关电路以及故障存储等组成。其整体设计方案如图1所示。
外部直流电压经高频变压器隔离转换成供可编程逻辑器件、光纤信号系统、门极驱动电路等使用的电压。可编程逻辑器件为控制中枢,首先对由光纤输入的脉冲宽度调制(pulsewidthmodulation,PWM)驱动信号进行短脉冲抑制、超频保护等处理,之后通过门极开关矩阵对IGBT的开通与关断过程实施多级分段控制[1][3]。Vce电路对IGBT开关状态进行检测,当发生短路时可编程逻辑器件控制门极开关矩阵对IGBT实施关断保护,并将故障信息反馈至上位机。可编程逻辑器件在正常工作时会对欠压检测、短路检测等故障检测电路输出状态进行实时采集并进行信息缓存。当发生某种故障时,可编程逻辑器件通过SPI总线与外接的存储芯片通信,将故障前后的异常信号与波形信息写入存储芯片以供故障分析使用。
2数字化驱动器电源设计
由于采用了可编程逻辑器件,因此数字化驱动器相较于模拟化的驱动器,其电源系统更加复杂,整个电源系统包含门极驱动电源±15V、可编程逻辑器件电源+3.3V与+1.2V、光纤电源+5V。其设计方案如下图2:
3数字化驱动器信号处理与故障保护
驱动信号控制着IGBT的开关,“纯净”或准确的信号决定IGBT能否安全工作,因此对进入驱动器的开关信号进行了短脉冲抑制与超频保护。
3.1驱动信号处理
3.1.1短脉冲抑制
IGBT驱动信号通常由数字信号处理(digitalsignalprocessing,DSP)或其他微控制器產生,通过电信号或者光信号传输至驱动器。因软件算法错误或者信号传输干扰可能会造成驱动信号的暂态变化,这些较短的脉冲信号会导致IGBT异常快速地开关,容易引起短路或其他故障,同时也会对反并联二极管造成损害,因此必须滤除。
如图3所示,为了抑制短脉冲,IGBT驱动信号PWM_IN经转换后入可编程逻辑器件,当出现电平高低状态转换时,由软件对转换的电平状态进行计时判断。当电平维持时间短于软件设定的阈值时间tSPS,则输出脉冲PWM_IN_FLT保持转换前的状态不变;当电平维持时间长于设定的阈值时间,则脉冲信号输出状态进行转换。短脉冲抑制功能可滤除较窄的开通或关断信号。
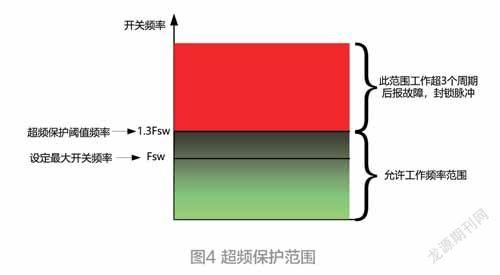
3.1.2超频保护
超过设定工作频率的开关信号可能会导致IGBT热损坏,超频保护能避免软件错误造成的严重后果,如图4所示,数字化驱动器超频保护阈值频率设置为1.3Fsw,当输入的PWM开关信号频率超过设置的阈值并超过三个周期后,如图5所示保护时序,驱动器会封锁门极开关脉冲,同时将故障反馈给上位机。
3.2故障保护
3.2.1欠压保护
IGBT驱动器板载隔离电源采用开环控制形式,后级电压稳定性较差,抗过载能力弱。当门极驱动正电压+VS较低时,会导致IGBT的开通不充分,产生较大损耗。当门极驱动负电压-VS较高时会导致驱动器维持关断、抗dv/dt的能力变差。因此需要对驱动电压的欠压情况进行监控。图6为使用TI公司电压检测芯片的欠压检测电路,由于门极电压Vs远高于检测芯片V+端口电压,因此使用电阻分压的方式降低电压后进入芯片,此时V+=V×S
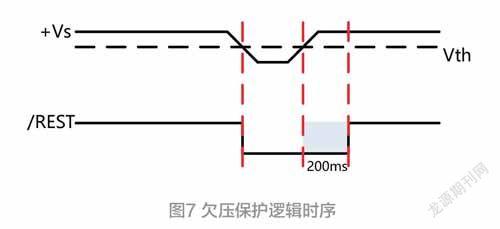
图7为欠压保护功能实现的过程与时序,当进入电压检测芯片V+管脚的电压低于2.63V阈值电压Vth时,芯片/REST管脚置低,可编程逻辑芯片检测到输入欠压信号变低后立即封锁门极脉冲,同时将故障反馈给上位机;当V+高于阈值电压Vth,且维持时间超过200ms时,/REST管脚置高。
3.2.2短路保护
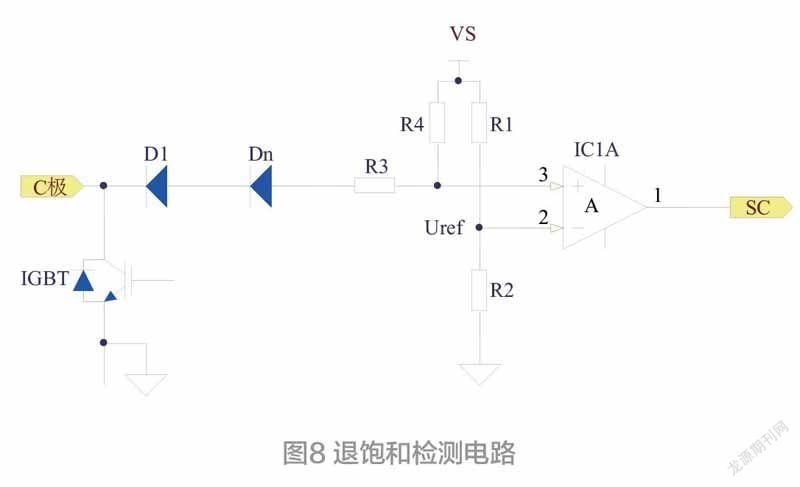
IGBT短路是变流器模块最严重故障,因此短路保护也是驱动器最重要的保护功能[4]。图8为二极管式退饱和检测电路,依靠检测IGBT短路时的退饱和现象,配合软件时序逻辑,可实现对SC1(开通前处于短路状态)、SC2(导通过程中短路)两种类型短路的可靠保护。
二极管式退饱和检测电路工作原理:
(1)当IGBT处于关断状态时,二极管D1~Dn在高压母线作用下反向阻断,比较器IC1A同相端电压为Vs,大于反相端阈值电压UVref=s×RR12R+2,比较器输出为高。但此时软件逻辑不检测短路故障,因此不报短路故障;
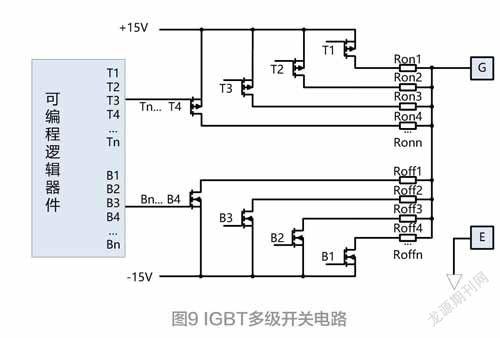
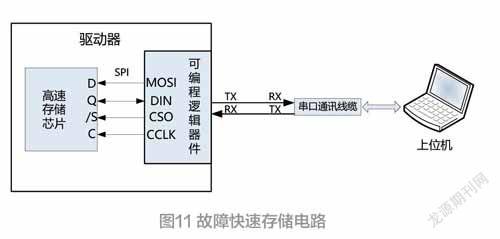
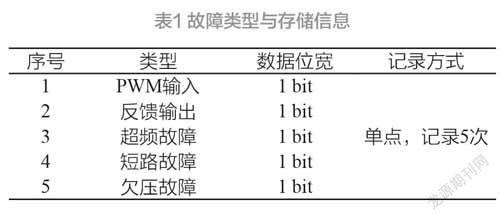
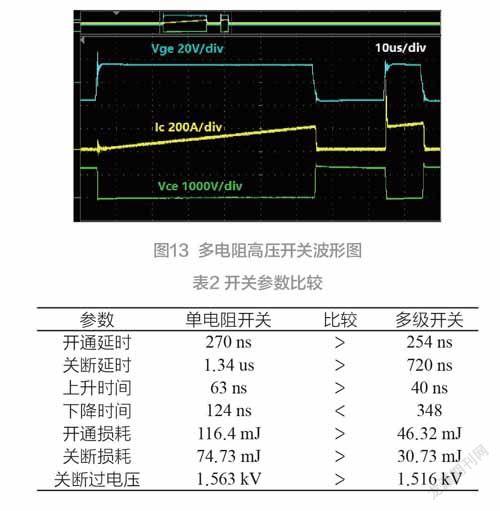
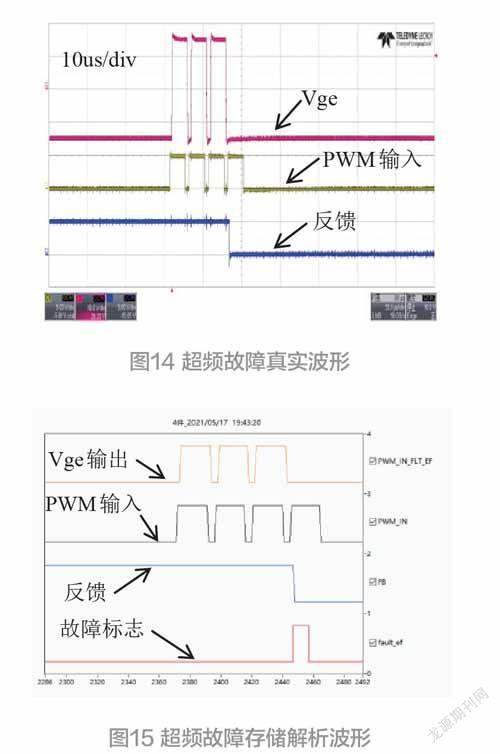
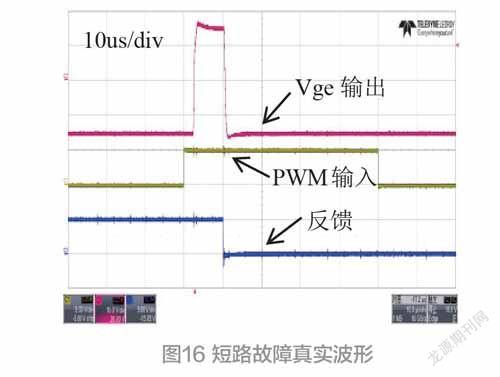
(2)当正常工作时,可编程程逻辑器件接收到开通信号后,软件开始进行短路检测倒计时,以规避正常开通耗时。IGBT开通过程中集电极与发射极电压Vce会从母线电压逐渐下降至Ucesat饱和压降3V左右,此时比较器同相端电压为Ucesat+nVF(R3< (3)当IGBT发生短路时,集电极电流快速上升,Vce电压会快速退饱和返回至母线电压,此时Vce电压会使二极管D1~Dn反向截至,比较器输出为高,待短路检测倒计时结束会立即报出短路故障。此后,可编程逻辑器件会封锁脉冲,为IGBT施加软关断,并将故障情况反馈至上位机。 4数字化驱动器门极开关控制 大部分IGBT驱动器使用单电阻或两电阻对IGBT的开通与关断进行控制,最终的取值是在开关延迟、开关损耗、电磁干扰、关断过电压等因素综合限制下折中取得。事实上,IGBT模块在开通或关断中呈现阶段性特性,每个阶段对门极电阻值都有特定要求。 使用可编程逻辑器件选择在开通或关断的不同阶段投入最优阻值的门极电阻,可大大优化IGBT模块的开关性能。如图9所示,门极开关矩阵由MOSFET组成,T1-Tn是负责开通的MOSFET,而B1-Bn是负责关断的MOSFET。开通门极电阻可由Ron1~Ronn任意组合并联取得,同样关断门极电阻可由Roff1~Roffn任意组合并联取得,因此开通或关断都可以获得2n−1种门极电阻取值。 图10为IGBT模块的开通和关断过程[2],门极驱动电阻多等级切换工作原理如下: 开通过程: T0~T1:驱动器接收到PWM开通信号,开關矩阵切换至开通时序。此时间段为IGBT的开通延迟阶段,IGBT集电极与发射极间电压Vce及IGBT集电极电流IC无变化,因此在该阶段投入最小阻值(Ron1||Ron2||...Ronn)的开通电阻,使IGBT门极与发射极间电压Vge快速上升至开通阈值Vge,th,缩短开通延迟时间; T1~T2:Vge已上升至开通阈值,IGBT电流IC开始上升,此时投入较小的门极电阻会加速电流上升的速度,但此阶段同时也是反并联二极管的反向恢复过程。门极电阻越小,IC上升速度越快,二极管反向恢复尖峰电流Irr越大。为了减小对反并联二极管的电流冲击以及减小较大di/dt造成的电磁干扰,可在此阶段投入相对较大的门极开通电阻值; T2~T3:此时IC电流已升至目标值,开通过程进入米勒平台阶段,为了减小米勒平台时间,加速Vce下降速度以此减少开通损耗,此时可投入较小的门极开通电阻值。但阻值的大小还要考虑dv/dt大小不会导致同桥臂IGBT有发生串扰导通的风险; T3~T4:T3时刻IC升至目标值,Vce也下降至接近饱和电压Vceast,IGBT基本导通。此时可投入最小的门极开通电阻,使Vge快速跳转至门极开通终值电压+15V,Vce快速降至饱和电压Vceast; T4~T5:T4时刻IGBT已经完全开通,使用最小门极开通电阻维持开通状态。 关断过程: T5~T6:T5时刻,驱动器接收到PWM关断信号,即刻进入关断时序。投入最小的关断电阻(Roff1||Roff2||...Roffn),使门极电压快速降至米勒平台,减小开通延时; T6~T7:Vge保持在米勒平台电压,Vce从饱和电压Vceast快速上升至母线电压,IC保持不变,此阶段会产生关断损耗,为了减小损耗,可投入较小的门极关断电阻缩短Vce上升至母线电压的时间; T7~T8:Vge从米勒平台电压降低至阈值电压Vge,th,IGBT处于放大区,IC随着Vge的降低而减小。由于换流回路不可避免存在杂散电感,会产生较高的关断过电压(LS×dtdi)。此过程可投入较大的门极关断电阻,减小电流变化率di/dt和关断过压尖峰; T8~T9:Vge低于阈值电压Vge,th,存在的拖尾电流IC不受Vge控制,由器件结构特性决定,此时投入小的关断电阻可使Vge快速降至关断终值电压-15V,进而完全关断; T9-:IGBT进入关断状态,使用最小关断电阻保持。 5数字化驱动器故障存储 大部分驱动器在IGBT发生故障时通过反馈信号与上位机通讯,实现系统快速保护。但这种方式无法甄别故障类型、不能指示重要节点信号(输入PWM、输出反馈等)发生故障时刻的状态、不能在IGBT或驱动器发生特别严重故障(IGBT烧损、驱动器烧损断电等)时记录最初状态,因此虽然报告了故障,但分析原因时仍然非常困难。 因此本设计在驱动器上添加了高速存储芯片,通过SPI总线与可编程逻辑器件连接[5],图11为数字化驱动器故障存储电路。当故障触发时,可编程逻辑器件将故障位及其他数据信息快速写入高速存储芯片。之后,上位机电脑通过串口通讯线与可编程逻辑器件连接,通过可编程逻辑器件读取,将高速存储芯片上记录的故障信息发送至上位机电脑进行分析。 正常工作时,可编程逻辑芯片连续采样故障检测电路及节点信号,并在芯片内RAM进行缓存,当故障发生时,可编程逻辑芯片立即向存储芯片发送请求存储指令,将故障前后2ms时长的采样到的数据发送至存储芯片进行记录。表1为需要存储的故障与节点信号: 6试验 6.1开关测试 使用地铁高频辅助变流器DC/DC模块作为测试对象进行双脉冲试验,测试条件为:IGBT型号FF400R17KE4,母线电压Udc=1300V,负载电流I=200A,电感负载L=400μH,脉冲宽度为Ton=60μs。 通过表2测试参数对比,门极电路采用多等级电阻开关控制显著缩短了开通与关断延迟时间,其中关断延迟大幅缩短46%。通过降低电流关断的速度,使杂散电感引起的关断过电压减小约50V。总体来看,因影响损耗的参数得到了优化,使得开通损耗减小60%,而关断损耗则减少了近59%,这将降低IGBT运行时的温升,进而延长其使用寿命。多等级控制电路明显优化了IGBT的开关性能。 6.2故障存储测试 6.2.1超频保护 使用波形发生器生成超过设定频率的PWM波形输入驱动器以模拟故障。从图14示波器测量到的真实波形可以看出,当输入的超频PWM信号超过3个周期时,门极输出Vge被软件封锁,IGBT被关断,不再执行输入脉冲动作,同时反馈置低向上位机报告了故障,实现了超频保护。图15为故障存储芯片在超频故障触发时存储到的各节点信号,与示波器测试到的波形信息相同,体现了故障存储功能的准确有效。另外,标志位也指出了故障的类型,为原因分析提供了有力证据。 6.2.2短路保护 将驱动器装在功率模块上,并对IGBT做短路连接。图16为示波器测量到的驱动器上的真实波形式,可以看出当输入脉冲超过设置的短路检测时间(约8μs)时,退饱和电路检测到了短路,软件立即封锁Vge脉冲,关断IGBT,同时向上位机反馈了故障,实现了对IGBT的短路保护。图17为芯片存储解析后的波形,与实际短路保护时的波形时序相同,反映了存储功能准确有效。 7结语 针对轨道交通系统中IGBT的使用特点,设计了基于可编程逻辑器件的数字化驱动器。测试表明,由可编程逻辑器件控制的可变电阻的多级门极开关电路可有效减小开关损耗,优化了IGBT开关性能。另外,创新性的加入了故障高速存储功能,可为系统故障分析提供可靠依据。
猜你喜欢
纺织科学研究(2021年6期)2021-07-15
电脑爱好者(2020年6期)2020-05-26
福建基础教育研究(2019年1期)2019-09-10
福建基础教育研究(2019年1期)2019-05-28
科学与财富(2016年26期)2016-12-01
中国卫生(2016年2期)2016-11-12
光学精密工程(2016年5期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
上海电机学院学报(2015年3期)2015-02-28
计算物理(2014年2期)2014-03-11
