
基于钕铁硼磁铁的吸附式多功能越障管外爬行机器人结构设计
2022-06-26 12:50李一凡郑义周淑于艳杰王志伟
科教创新与实践 2022年10期
李一凡 郑义 周淑 于艳杰 王志伟

摘要:针对管道检查和维修的一些特殊工作环境的需求,设计了具有磁性吸附装置的多功能越障管外爬行机器人。该机器人能够实现在具有磁性的水平管道、竖直管道、弯曲管道等进行行走、跨越、旋转等动作。利用Solid Works建立了机构模型,分析了在通过不同管道,进行爬行时的机器人的运动状态,为样机的研制提供参考依据。研究结果表明:该磁性吸附多功能越障管外爬行机器人结构设计方案是有效合理的。
关键词:管外爬行;磁性吸附;多功能;越障;机器人
1 引言
目前,由于大多数管道检查和维修工作主要依靠工作人员爬管来完成,劳动强度大,工作效率低;尤其是许多工业管道输送的是高温、高压、剧毒、有辐射的流体,这就进一步加大了工作的危险性[1]。因此,迫切需要研发一种具有攀爬和越障功能的基于钕铁硼磁铁的吸附式多功能越障管外爬行机器人,以此代替人力对管道进行定期的检查和维修。
但现有的一些管外爬管机器人,在实际使用时依旧存在运动模式单一、适用局限性大等问题,具体体现为无法使其吸附或抱紧在管道上,大多数只能沿着管道方向行走,不具备绕管道旋转的功能;有的无法跨越管道上的障碍,有的只能攀爬竖直或水平的管道,有的甚至不能连续地经过管道各处的外表面,难以满足一些对各种姿态的管道外表面进行连续检测或维护的需求[1]。
因此,本文设计一种基于钕铁硼磁铁的吸附式多功能越障管外爬行机器人结构设计,以解决上述背景技术中提出的问题。
2 基于钕铁硼磁铁的吸附式多功能越障管外爬行机器人机械结构设计
2.1 结构设计
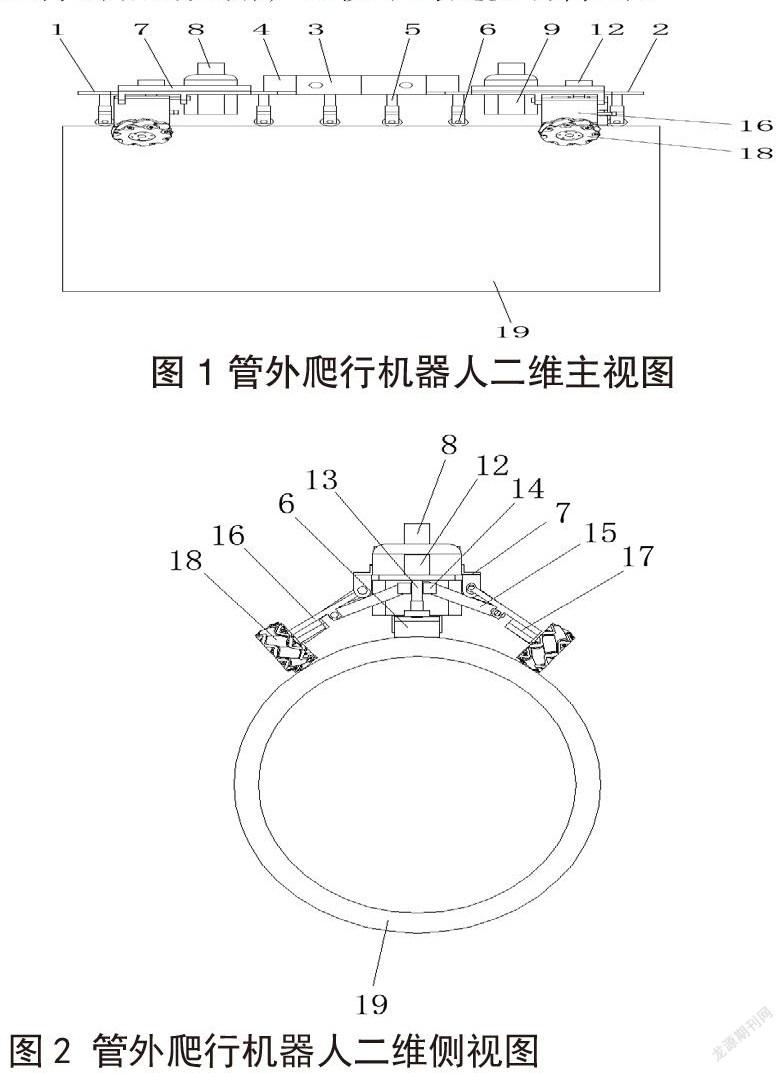
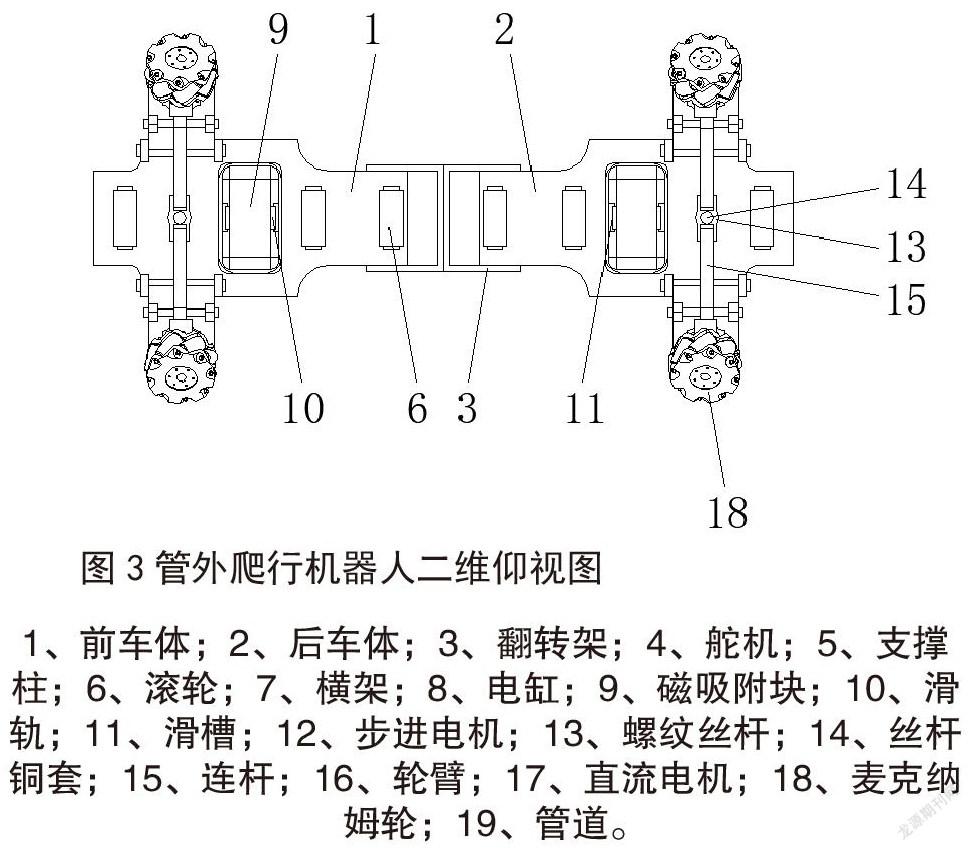
本文设计了一种基于钕铁硼磁铁的吸附式多功能越障管外爬行机器人(以下简称为管外爬行机器人),结构设计如图1、图2以及图3所示。
管外爬行机器人整体是由前车体和后车体组成,而前车体与后车体之间的顶部设置有翻转架;在前车体与后车体顶端的一侧皆固定有舵机,且舵机的输出端分别与翻转架内部的一侧转动连接;前车体与后车体顶端的中心位置处皆固定有横架,且横架顶部的一侧皆安装有步进电机[2];而步进电机的输出端皆通过联轴器安装有螺纹丝杆[3],且两个螺纹丝杆分别位于前车体和后车体的下方;螺纹丝杆上皆套装有丝杆铜套,且丝杆铜套的外侧壁上皆对称铰接有两个连杆;连杆的一端皆与轮臂的中部转动连接,且两组轮臂的一端分别与所述横架底端的两侧转动连接;轮臂的另一端皆固定有直流电机,且直流电机的输出端皆轴向安装有麦克纳姆轮,前车体与后车体皆设置于管道的表面,且两组麦克纳姆轮的底端皆与所述管道的表面滚动接触。
通过舵机控制前車体或后车体关于翻转架垂直旋转,并通过电缸推动磁吸附块关于横架垂直升降。
磁块是由钕铁硼磁铁组成;此磁块可以吸附本身重量的640倍的重量,而且钕铁硼具有体积小、重量轻和磁性强的特点;而它是迄今为止性能价格比最佳的磁体[4],所以这可以使得前车体或后车体更好的紧密贴合管道表面,不会掉落;同时利用支撑柱底端的滚轮进行辅助支撑,维持与管道表面的相对间隔。
该机器人车体无需包围在管道外部,从而适用于在各种模式的管道表面上运动,可跨越多种障碍。
通过步进电机控制螺纹丝杆定量旋转[5],使得丝杆铜套带动连杆线性偏转,则轮臂将联动旋转,使得直流电机和麦克纳姆轮反向扩展或收缩,从而适用于不同管径的管道,实用性强[6-8]。
此设计的管外爬行机器人不仅可以通过不同管径的管道表面,可以在各种模式的管道表面运动,并可自动调节轮臂等组件的相对夹角,以便于跨越多种障碍。
2.2 Solid Works三维模型建立
用Solid Works建立管外爬行机器人的三维模型,结构示意图如图4所示。机器人整体包括了车体模块、轮臂机构、吸附模块、支撑模块以及翻转机构。
3 越障管外爬行机器人爬行工作原理分析
3.1 在水平的直行管道前行或者后退
如图5,管外爬行机器人在水平的直行管道前行或者后退时,即直接操控前车体1和后车体2两侧的直流电机17同速同向运行,使得四个麦克纳姆轮18的同速度顺时针或逆时针转动,实现前车体1和后车体2的同步前进或后退。
3.2 绕管道左右旋转
同上图,管外爬行机器人在水平的直行管道左右旋转运行时,即直接操控前车体1和后车体2两侧的直流电机17同速同向运行,使得四个麦克纳姆轮18的同速度顺时针或逆时针转动,实现前车体1和后车体2的同步前进或后退。
3.3 跨越竖直十字型或L型管道
如图6,管外爬行机器人在跨越竖直十字型或L型管道时的工作原理如下:
(1)步骤一:在L型管道19附近处,通过将机器人车体旋转到与L型管道19处于同一平面内,通过控制后车体2中的电缸8伸长,利用下降的磁吸附块9使得后车体2对管道19的吸附力增强,并反向操作使得将前车体1对管道19的吸附力减弱,随后,通过舵机4的驱动,将前车体1关于翻转架3旋转上抬90°,即可使得前车体1的底面对着L型管道19的另一段,再通过后车体2两侧的直流电机17驱动两个麦克纳姆轮18,使前车体1往前运动;
(2)步骤二:当前车体1接触到L行管道19的另一段时,通过控制前车体1中的电缸8水平推移磁吸附块9,使得前车体1对管道19的吸附力增强,并反向操作使得后车体2对管道19的吸附力减弱,通过舵机4的驱动,将后车体2旋转抬起脱离原来的管道19,通过前车体1两侧的直流电机17驱动两个麦克纳姆轮18,使前车体1继续往前运动,当后车体2通过L型管道19的节点处,通过舵机4的反向驱动,将后车体2降落在管道19上,通过调整两个电缸8的伸长量,使得两个磁吸附块9对管道19的吸附力恢复至原来大小,即可继续前行。
4 总结
本文设计了基于钕铁硼磁铁的吸附式多功能越障管外爬行机器人结构,通过Solid Works进行三维建模,解决了在实际使用时依旧存在运动模式单一、适用局限性大等问题。根据工作方法要求,使其可以通过不同管径的管道(或圆柱)表面,可在各种类型的管道(或圆柱)表面运动,并可调节轮臂等组件的相对夹角,以便于跨越多种障碍,从而满足对具有磁性的管道(或圆柱体)的质量检测、维护修复等作业,为以后的样机开发与研制奠定了基础。
参考文献:
[1] 郑义, 周淑芳, 邓传云. 关节式爬管机器人夹紧机构的优化研究[J]. 机电工程, 2015,32(03):328-332.
[2] 马帅. 袋装物料智能装车系统关键技术研究[D]. 河北科技大学, 2018.
[3] 武振昕. 基于DSP振动信号采集系统的开发与应用[D]. 广东工业大学, 2013.
[4] 李伟, 梁静秋, 李小奇, 等. 一种微型光开关的设计与仿真分析[J]. 光学学报, 2008(06):1151-1154.
[5] 张晓燕, 卢照新, 刘学君, 等. 基于MSP430的直线导轨定位装置的设计与实现[J]. 计算机测量与控制, 2017,25(07):186-189.
[6] 杜毅豪, 刘鹏宇, 宋若薇, 等. 基于麦克纳姆轮的室内自主搬运小车[J]. 电子世界, 2020(09):204-206.
[7] 关强. 可重构式排水管道机器人结构研究与动力学分析[D]. 哈尔滨工程大学, 2018.
[8] 王美奇, 刘泓恺, 陈均峰, 等. 自适应管道缺陷检测爬行器结构设计[J]. 机电工程技术, 2020,49(02):138-140.
国家级大学生创新创业项目:多功能越障管外爬管机器人结构设计与研究,S202013320011.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
家庭科学·新健康(2016年9期)2016-10-25
企业导报(2016年13期)2016-07-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
