
大量海上AIS移动基站对全球船舶监控效果的仿真及可视化
2022-06-26 16:42胡勤友张蓓杨春郑豪戚玉玲
上海海事大学学报 2022年2期
胡勤友 张蓓 杨春 郑豪 戚玉玲


摘要:针对目前岸台基站或卫星基站还不能对全球尤其是位于交通繁忙海域的船舶进行连续有效的监控的问题,设计一种海上船舶自动识别系统(automatic identification system,AIS)移动基站(简称船舶基站),仿真大量船舶基站对全球船舶的监控效果。从全球所有船舶中随机选取部分船舶作为船舶基站进行仿真得出:在每天更新一次船位的情况下,全球船舶基站的最佳设置数是3 500,覆盖率约为8431%;船舶基站的AIS信号监控范围基本覆盖全球所有有航线海域,且单片海域的覆盖率普遍在85%以上。
关键词: 船舶监控; AIS基站; 仿真; 覆盖率
中图分类号: U675.7;U697文献标志码: A
Simulation and visualization of global ship monitoring effect
by a large number of offshore AIS mobile base stations
Abstract: In view of the problem that shore base stations or satellite base stations can not conduct continuous and effective monitoring on the global ships, especially ships in busy traffic sea areas, the offshore automatic identification system(AIS) mobile base stations (ship base stations, in short) are designed, and the monitoring effect of a large number of ship base stations on global ships is simulated. Some ships are randomly selected from all ships worldwide as ship base stations for simulation. It is concluded that, under the condition of ship position update once a day, the optimal setting number of the global ship base stations worldwide is 3 500, and the coverage rate is about 8431%; the AIS signal monitoring range of ship base stations basically covers all the route sea areas worldwide, and the coverage rate of single sea area is generally above 85%.
Key words: ship monitoring; AIS base station; simulation; coverage rate
引言
船舶自动识别系统(automatic identification system,AIS)是由基站和船載设备共同组成的一种新型数字助航系统和设备,可播发船舶的动态、静态信息,是研究海上交通的重要数据来源和支撑[1]。AIS信息是从船上发射经由岸台基站(以下简称岸基)或卫星基站(以下简称星基)接收最终传输至陆地数据中心的,因此,基站作为信息传输的重要中转枢纽,很大程度上直接影响了AIS数据的质量,而数据的完整与否是能否客观分析船舶态势的关键[2]。现有的AIS数据接收现状表明:岸基信号接收范围有限且接收能力受障碍物影响[34];星基通过低轨道实现全球覆盖[5],虽不受障碍物影响,但由于信道有限,当部分区域发射时隙密集时,会出现AIS时隙冲突[6],从而导致接收丢包。解决此问题的星载AIS关键技术目前仍在研发之中。[7]
为解决岸基和星基本身局限性所导致的AIS信息接收不完整问题,本文设计了一种基于AIS信号接收系统的海上AIS移动基站(以下简称船舶基站),将分布于全球主要航线上且处于运动状态的船舶作为监测点,实现对其周围海域船舶信息的动态性覆盖,有效提升对AIS信号的捕获效率,保障船与船、船与岸之间数据传输的及时性。
为探寻最优的船舶基站部署方案,进行多次仿真实验,研究不同数量的船舶基站所能覆盖的全球船舶的数量,得到船舶基站的最佳设置数。最后,对船舶基站数最佳时监测到的全球船舶的分布情况进行可视化分析。
1船舶基站简介
船舶基站指在正常运行的船舶上安装AIS接收器[8],通过船载AIS设备直接捕获本船附近的目标船的AIS信号,将信号经由海事卫星宽带传送至卫星接收站,进而传送到地面数据中心。船舶基站信号收发原理示意图如图1所示。
船舶基站在系统和功能上具有以下特点:
(1)硬件模块主要由AIS接收器、VSAT网络(船舶本身均已安装配置)和DTU传输单元组成[9]。软件模块不但支持本船船位和周边船舶船位的采集,而且可以对采集频率进行动态设置。这可以让船舶根据实际情况改变数据收集频率,尽可能减少数据冗余,提高数据传输效率和保证数据的质量。此外,在该系统每次断电重启后,采集任务会自动恢复,定期同步系统时钟到世界协调时间(universal time coordinated, UTC),确保船位采集时间的精度。
(2)因为船舶本身仍在不停地航行,所以船舶基站可以克服岸基信号接收范围有限的缺点,所接收AIS信号范围能够覆盖到船舶所及之地甚至是远洋海域。另外,因为船舶基站上的AIS接收器与岸基的类似,传输带宽大且更新频率快,所以先通过船舶基站接收AIS信号再通过海事卫星宽带[10]中转AIS信号的方法,可以克服星基带宽受限且更新频率较慢的缺点。AIS接收器成本较低,适合大规模安装。F113ADAF-CFF6-4D10-A660-AD1C5065D574
2船舶基站监控效果的仿真实验
2.1仿真效果评估指标
为准确评估船舶基站的AIS信号接收效果,从24 h内全球海上所有船舶中选取n艘船作为船舶基站,计算这n个船舶基站在这24 h内分别监测到的船舶数,并以所有的船舶基站可监测到的船舶数与全球海上所有船舶数的百分比(简称覆盖率)作为评估指标。覆盖率计算方法为(1)式中:Pn表示n个船舶基站24 h内的可监测到的船舶数;Q表示24 h内全球海上所有船舶数,为定值。Kn值越大,说明船舶基站对全球船舶的监控效果越好。
2.2实验原理
假设船舶基站的信号接收范围是以该船舶基站为圆心的圆形区域,每个船舶基站所能接收的AIS信号范围是固定且相同[11-12]的,并令圆的半径r=25 n mile。以下称装备有AIS接收器的船舶为基站船舶,未装备AIS接收器的船舶为非基站船舶。
将基站船舶所处位置的经度和纬度分别记为JT和WT,非基站船舶所处位置的经度和纬度分别记作JS和WS,则两船之间的距离表示为(2)式中:R表示地球平均半径(6 378 km)。船舶基站可监测船舶的范围必须满足(3)满足此条件的非基站船舶被认定为可监测船舶。船舶基站监测船舶示意图见图2。
2.3实验步骤
统计2020年1月2日这一天内监测到的全球海上所有船舶(所有数据均来自海事数据供应商上海迈利船舶科技有限公司),得到24 h内全球海上船舶数189 693艘。从中随机选取n(0≤n≤6 000)艘船作为船舶基站,计算n个船舶基站的覆盖率。具体步骤如下:
(1)从全球海上所有船舶中随机抽取n艘船作为船舶基站。
(2)以船舶基站位置(用经纬度坐标表示)为圆心,以25 n mile为半径划定范围;遍历全球海上所有船舶的经纬度,统计满足式(3)的船舶;对在同一时刻重复识别到的船舶进行去重处理,避免同一艘船同时被多个船舶基站监测到而造成重复计数。(3)重复上述步骤,共进行3组实验,得到n个船舶基站可监测船舶数和全球海上船舶数,用式(1)计算覆盖率。
2.4实验结果分析
以上3组仿真实验得到的结果见表1。全球船舶基站的覆盖率曲线见图3,其中:曲线是由若干个散点连接而成的折线,散点之间的横坐标间隔为200。本文利用插值法[1316],以05为插值间隔,在尽可能减少误差、保持原有数据的变化趋势的同时对上述折线进行平滑处理。从图3中的曲线走势可以看出,3组实验得到的覆盖率曲线几乎完全重合,变化趋势也极其相似:随着船舶基站数的增加,覆盖率整体上呈上升态势;在船舶基站数n<1 000时,覆盖率曲线较陡;在船舶基站数n>1 000时,随着船舶基站数的增加,覆盖率曲线上升趋势逐步减缓;在船舶基站数超过3 500后,覆盖率曲线开始收敛。取3组实验中船舶基站数n=3 000和n=4 000的平均值(即n=3 500),估算覆盖率为84.31%。由实验结果可知:当船舶基站数较少时,增加其数量能够有效提高覆盖率;在船舶基站数增至2 000后,继续增加船舶基站数时,覆盖率的增长速度逐渐放缓;在船舶基站数增至3 000后,覆盖率不会随船舶基站数的继续增加而发生明显变化;在船舶基站数增至3 500后,覆蓋率几乎不变。
考虑船舶基站设置数和全球船舶监控效果的费效比,计算单位船舶基站的可监测船舶数:(4)式中:Pn表示投入n个船舶基站所能监测到的船舶数。单位船舶基站可监测船舶数随船舶基站数的变化曲线见图4。由图4可知,在投入4 000个船舶基站后,单位船舶基站可监测船舶数接近40艘。因此,综合考虑覆盖率和船舶基站投入效益,设置船舶基站最大数为4 000。此时3组实验的平均覆盖率为85'36%。
3最佳AIS信号覆盖率的可视化
对船舶基站数为最佳设置数(3 500)时的全球船舶监控效果进行可视化,绘制AIS信号覆盖率网格热点图,用于分析在最佳数量的船舶基站监测下,全球船舶的空间分布特点。
3.1可视化设计
具体可视化步骤如下:
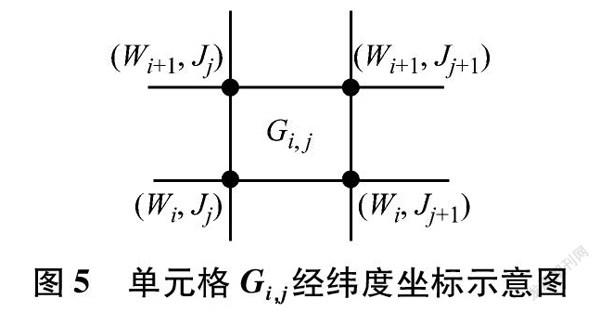
(1)借鉴GridCount算法[17],将世界地图网格化。以(0°N,0°E)为起点,以1°为间隔,把世界地图划分为180×360个的单元格,单元格的纬度依次记为W-90,W-89,…,W0,W1,…,W90,经度依次记为J-179,J-178,…,J0,J1,…,J180,其中北纬、东经为正,南纬、西经为负。为便于表达,本文用方格表示单元格。以单元格Gi,j(i=-90,-89,…,0,1,…,90;j=-179, -178,…,0,1,…,180)为例,其具体坐标见图5。
(2)使所有的基站船舶和非基站船舶分别遍历所有的单元格,根据点与单元格的经纬度信息将所有的监测点和被覆盖点划分到对应的单元格内,统计每个单元格中的船舶总数、每个单元格中的被监测船舶数、含有可监测船舶的单元格数、含有任意船舶的单元格数。以单元格G1,2为例,该单元格在经纬度坐标系下的纬度取值范围是[1°N,2°N],经度取值范围是[2°E,3°E]。统计出各单元格中的船舶数,对于刚好位于单元格边界的船舶,取左舍右,取上舍下。单元格与监测点关系图例见图6。根据上述单元格船舶数统计规则,图6a中单元格1、2、3、4中的监测点数分别为1、2、1、2。
(3)统计单元格Gi,j中的监测点Qi,j和被覆盖点
Pi,j的数量,见图7。图7中,单元格1、2、3、4中的监测点数依次为3、2、2、3,被覆盖点数分别为3、3、2、2。进一步计算单位单元格的AIS信号覆盖率,记作Ki,j。Ki,j计算公式如下:Ki,j=Pi,jQi,j+Pi,j×100%(4)计算得到图7中单元格1、2、3、4的AIS信号覆盖率分别为50%、60%、50%、40%。按照此方法依次计算出全球188 591个单元格的AIS信号覆盖率。F113ADAF-CFF6-4D10-A660-AD1C5065D574
3.2可视化结果分析
依照式(4)计算出全球每个单元格的AIS信号覆盖率大小,由小到大依次用从白→蓝→绿→黄→红的过渡色带表示,作出AIS信号覆盖率网格热点图,见图8。
覆盖率分布热点图
从图8可以看出,3 500个船舶基站能够很好地覆盖全球绝大部分有航线的海域:对于因航线繁多、船舶密度较大而容易导致AIS信号拥挤的大陆沿岸海域(如亚洲东海岸、欧洲西海岸、北非沿岸、南北美的巴拿马运河处等)和海事安全事故频发地(如新加坡海峡等)[18]均能够实现较好的AIS信号覆盖,色带等级几乎都在红色以上,说明船舶基站对这些海域的AIS信号覆盖率都在90%以上;对于因远离大陆而容易发生信号丢失的海域或AIS信息收集较为困难的的海域(如印度洋、太平洋、大西洋[19]等的中心海域,甚至是北冰洋海域等)也有较好的覆盖效果,色带等级大部分为红色。
4结束语
本文证实了船舶基站的设置可以弥补岸基和星基在AIS数据收集上的不足。本文研究表明:①船舶基站设置得越多,覆盖率越高,即所监测到的全球船舶越多。4 000个船舶基站能较好地实现费效平衡,此时覆盖率为8536%。②设置3 500个船舶基站基本能实现对全球海域的全覆盖,包括远离大陆的海域和AIS信号拥挤的大陆沿岸海域,且对绝大部分海域的AIS信号覆盖率高达85%甚至90%以上。综上所述,船舶基站能够为世界海事安全领域研究提供更完善的数据来源,对海上船舶数据的收集和海事方面的研究具有一定意义。
参考文献:
[1]田璐, 张敖木翰, 张翼, 等. 船舶AIS大数据资源管理及分析应用架构设计[J]. 交通运输研究, 2019, 5(5): 3140. DOI: 1016503/j.cnki.20959931201905004.
[2]梅强, 吴琳, 彭澎, 等. 南海区域商船典型空间分布及贸易流向研究[J]. 地球信息科学学报, 2018, 20(5): 632639. DOI: 1012082/dqxxkx.2018180017.
[3]赵显峰, 房延军, 王辰. 内河船舶自动识别系统通信覆盖盲区技术解决方案研究[J]. 信息通信, 2014(4): 2931.
[4]初秀民, 刘潼, 马枫, 等. 山区航道AIS信号场强分布特性[J]. 交通运输工程学报, 2014(6): 117126. DOI: 103969/j.issn.16711637201406015.
[5]贺超峰, 徐铁, 胡勤友, 等. 应用北斗卫星导航系统的船舶AIS数据采集[J]. 上海海事大学学报, 2013, 34(1): 59. DOI: 103969/j.issn.16729498201301002.
[6]陈赞, 陆文斌, 方诗峰, 等. 星载AIS信号接收机解时隙冲突研究[J]. 微型机与应用, 2017, 36(17): 6567. DOI: 1019358/j.issn.16747720201717019.
[7]潘宝凤, 梁先明. 星载AIS接收系统设计及关键技术[J]. 电讯技术, 2011, 51(5): 15. DOI: 103969/j.issn.1001893x.201105001.
[8]陈奇. 星载AIS信号接收技术的研究[D]. 南京: 南京理工大学, 2017.
[9]杨仁庆, 杨清森, 孙振龙, 等. VSAT卫星便携站的设计与实现[J]. 数字通信世界, 2019(11): 34, 15. DOI: 103969/j.issn.16727274201911002.
[10]林菡. 宽带海事卫星通信系统技术的基本特点及应用[J]. 中国新通信, 2019, 21(23): 18.
[11]刘畅. 船舶自动识别系统(AIS)关键技术研究[D]. 大连: 大连海事大学, 2013.
[12]LAPINSKI A L S, ISENOR A W. Estimating reception coverage characteristics of AIS[J]. The Journal of Navigation, 2011, 64(1): 609623. DOI: 101017/S0373463311000282.
[13]李峰, 汪杰君, 熊显名, 等. 基于三次样条插值法的干涉仪反射镜面型值误差分析[J].仪器仪表用户, 2020, 27(4): 1822. DOI: 103969/j.issn.16711041202004006.
[14]HAMMOND T R, PETERS D J. Estimating AIS coverage from received transmissions[J]. The Journal of Navigation, 2012, 65(3): 409425. DOI: 101017/S0373463312000057.
[15]PETERS D J, HAMMOND T R. Interpolation between AIS reports: probabilistic inferences over vessel path space[J]. The Journal of Navigation, 2011, 64(4): 595607. DOI: 101017/S0373463311000208.
[16]HU Q Y, GAI F J, YANG C, et al. An algorithm for interpolating ship motion vectors[J]. TrasNav: International Journal on Marine Navigation and Safety of Sea Transportation, 2014, 8(1): 3540. DOI: 1012716/1001080104.
[17]向哲, 胡勤友, 施朝健. 一种计算AIS基站信号覆盖率的方法[J]. 桂林理工大学学报, 2016, 36(4): 844848. DOI: 103969/j.issn.16749057201604033.
[18]ZHANG L Y, MENG Q, FWA T F. Big AIS data based spatialtemporal analyses of ship traffic in Singapore port waters[J]. Transportation Research Part E, 2019: 287304. DOI: 101016/j.tre.201707011.
[19]LAPINSKI A L S, ISENOR A W. Mapping AIS coverage for trusted surveillance[C]∥Unmanned/Unattended Sensors and Sensor Networks VII. SPIE, 2010: 237244. DOI: 101117/12864698.
(編辑贾裙平)
收稿日期: 20210308修回日期: 20210628
基金项目: 上海市科学技术委员会社会发展领域重大项目(18DZ1206300)
作者简介: 胡勤友(1974—),男,安徽舒城人,教授,博士,研究方向为智能船舶与海事信息处理,(Email)qyhu@shmtu.edu.cnF113ADAF-CFF6-4D10-A660-AD1C5065D574
猜你喜欢
今日农业(2022年15期)2022-09-20
价值工程(2018年3期)2018-01-23
科技资讯(2016年18期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
电脑知识与技术(2016年8期)2016-05-19
企业导报(2016年6期)2016-04-21
商(2016年3期)2016-03-11
