塑料大棚棚顶清洗机的设计与试验
2022-06-25 08:41王云力张赛赛韩小斌王万章朱晨辉吕志军
河南农业大学学报 2022年3期
王云力,张赛赛,韩小斌,王万章,朱晨辉,吕志军
(1.河南农业大学机电工程学院,河南 郑州 450002;2.河南农先锋科技股份有限公司,河南 郑州 450000;3.贵州省烟草公司遵义市公司,贵州 遵义 563000)
塑料大棚作为广泛使用的农业生产设施,是现代农业的重要组成部分[1]。塑料大棚通过改变棚内的光照、温度和湿度等起到保温栽培的作用,不仅可以跨区域、跨时令提供种类丰富的农产品,还可以为促进设施农业标准化生产、规范农艺技术以及抢占农时提供支撑[2-3]。塑料大棚凭借成本低、易搭建和效益高等特点已得到广泛的应用和推广,其在农业领域占有率逐渐升高,近年来相关研究多集中于棚内气候[4]、温度[5]和光性能[6]等条件控制以及传感器设计[7]和智能管理系统构建[8]等方面。中国塑料大棚多为弓型结构,主体采用钢管或竹竿制成弓型骨架,然后在其上铺设一层塑料薄膜。塑料大棚棚顶较高且面积较大,长时间容易堆积灰尘并滋生绿藻苔藓等,导致棚顶塑料薄膜透光率降低以及植物光合作用效率下降,进而造成塑料大棚内作物减产且质量降低。若更换塑料薄膜不但成本高而且费时费力,同时更换的塑料薄膜会污染环境。因此,定期清洗塑料大棚棚顶恢复塑料薄膜透光率十分重要[9]。
国外对塑料大棚棚顶清洗设备的研究比较早。荷兰研发的半自动和全自动玻璃温室棚顶清洗机,配合纵横的导轨可以完成棚顶纵向自动化清洗和横向移动,清洗效果明显,自动化程度高[10]。这些设备自动化程度虽然高,但是投入大,需要规划和建设标准的大棚以及配套的纵横导轨和喷淋系统。中国塑料大棚目前尚不具备这种条件,而且现有塑料大棚改造成本也很大。在国内,现有的棚顶清洗设备主要应用在玻璃温室上,塑料大棚棚顶清洗设备还不成熟,导致目前国内塑料大棚几乎都是人工清洗,不仅成本高,而且效率低、效果差。近年来,塑料大棚棚顶清洗机相关研究取得一些成果。丁润锁等[11]设计的温室大棚电动清洗机实现了温室大棚顶部的半自动清洗。赵建等[12]设计的塑料大棚清洗机由6节清洗装置铰接而成,能够较好地对大棚仿形。殷坤勤等[13]应用无线电遥控技术,使塑料大棚清洗机两端的辅助行走轮与棚顶行走轮同步前进。黄峰等[14]参照荷兰清洗设备设计了人字形清洗装置。陈大军等[15]通过旋转的毛刷辊在棚顶上沿轨道纵向移动达到清洗大棚的目的。王坤等[16]则对大棚清洗技术进行分析研究,总结出国内外大棚清洗机的发展历程和技术特点。然而,这些清洗设备理论上可行,但实际应用中效果一般。有的设备清洗效果不明显,需要改造大棚,增设导轨和喷淋系统;有的设备体积大,不易翻跨棚顶;有的设备质量大,容易损坏棚顶塑料薄膜且不方便搬运;有的设备对弓型骨架间距有要求,适应性低;有的设备电池容量不足,作业时间较短[17]。受这些因素的制约,塑料大棚棚顶清洗机尚未在中国推广与应用。因此,本研究为解决中国塑料大棚棚顶清洗成本高、适用性差以及操作不便等问题,设计了一种结构简单、轻便适用的塑料大棚棚顶清洗机,能够提高清洗效果和清洗作业效率,促进其工业化应用和市场化推广。
1 塑料大棚棚顶清洗机设计
1.1 塑料大棚棚顶清洗机设计原理
本研究设计的塑料大棚棚顶清洗机由2套清洗单体(1套主机和1套副机)及清洗带组成,具体结构见图1。主机和副机分别分布在塑料大棚两侧的天沟内。清洗带紧贴在塑料大棚的棚顶,两端分别连接在主机和副机上。清洗带宽度300 mm,厚度5 mm,由化纤编织网(2 800目)制作而成,该材料制成的清洗带透水性能良好,且相对粗糙的表面有利于搓擦掉棚顶上的灰尘。作业时,2名操作人员在天沟上分别把持着主机和副机,并同时向前移动,主机和副机的缠绕滚保持同步正转或反转。正转时,主机上的缠绕滚收紧清洗带,副机上的缠绕滚放松缠绕带,使紧贴棚顶的清洗带向主机一侧移动。到设定的时间后,2个缠绕滚同时改变转动方向,即开始反转,此时主机上缠绕滚放松清洗带,副机上的缠绕滚收紧清洗带,紧贴棚顶的清洗带向副机一侧移动,直至移动到设定的时间后,2个缠绕滚又同时改变转动方向。如此往复后,塑料大棚棚顶表面的灰尘和绿藻等被清洗带搓擦下来,从而实现清除棚顶污染物的目的。在清洗带来回搓拉的过程中,单独使用普通的PVC软管或水枪不断向清洗带上喷洒清水,使搓拉掉的灰尘顺着水流流下来。
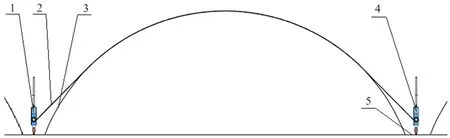
注:1.主机;2.清洗带;3.塑料大棚;4.副机;5.天沟。Note:1.Main machine;2.Cleaning belt;3.Plastic greenhouse;4.Assistant machine;5.Gutter.图1 塑料大棚棚顶清洗机的结构Fig.1 Structure of plastic greenhouse top cleaning machine
1.2 塑料大棚棚顶清洗机设计
本研究设计的塑料大棚棚顶清洗机中的主机和副机结构一致,作业开关只在主机上,由主机操控整个设备。主机的结构主要由脚轮、框架、缠绕滚、电机、控制器、无线收发器、调试开关、电源开关、提手、作业开关、推杆、电池、轴承和清洗带固定板等组成,如图2所示。其中,框架采用1.5 mm优质碳钢板U型折边设计,强度可靠,结构简单质量轻;缠绕滚安装在框架上,用于固定和调整清洗带,并由电机直接驱动,定时改变转动方向;控制器控制并协调着主机和副机的动作逻辑;无线收发器用于连接主机和副机的控制系统并负责传递指令;清洗带固定板用于把清洗带固定在缠绕滚上,操作时先用清洗带固定板把清洗带的一端压在缠绕滚上,然后用螺钉紧固;调试开关用于调试电机的正转或反转,特别是固定好清洗带后需要使用调试开关调整清洗带的张紧程度,使清洗带紧紧贴附在棚顶上。
本研究设计的塑料大棚棚顶清洗机的主要技术参数如表1所示。该设备整机质量轻,方便携带。电池采用电压12 V且容量40 Ah的锂电池,能够快速充电,且电池容量可满足设备正常作业4 h。缠绕滚直径为50 mm,长度320 mm。清洗带宽度为300 mm,来回搓拉的时间可调。作业时,清洗带紧贴在棚顶上进行往复搓拉,往复搓拉长度l如公式(1)所示。
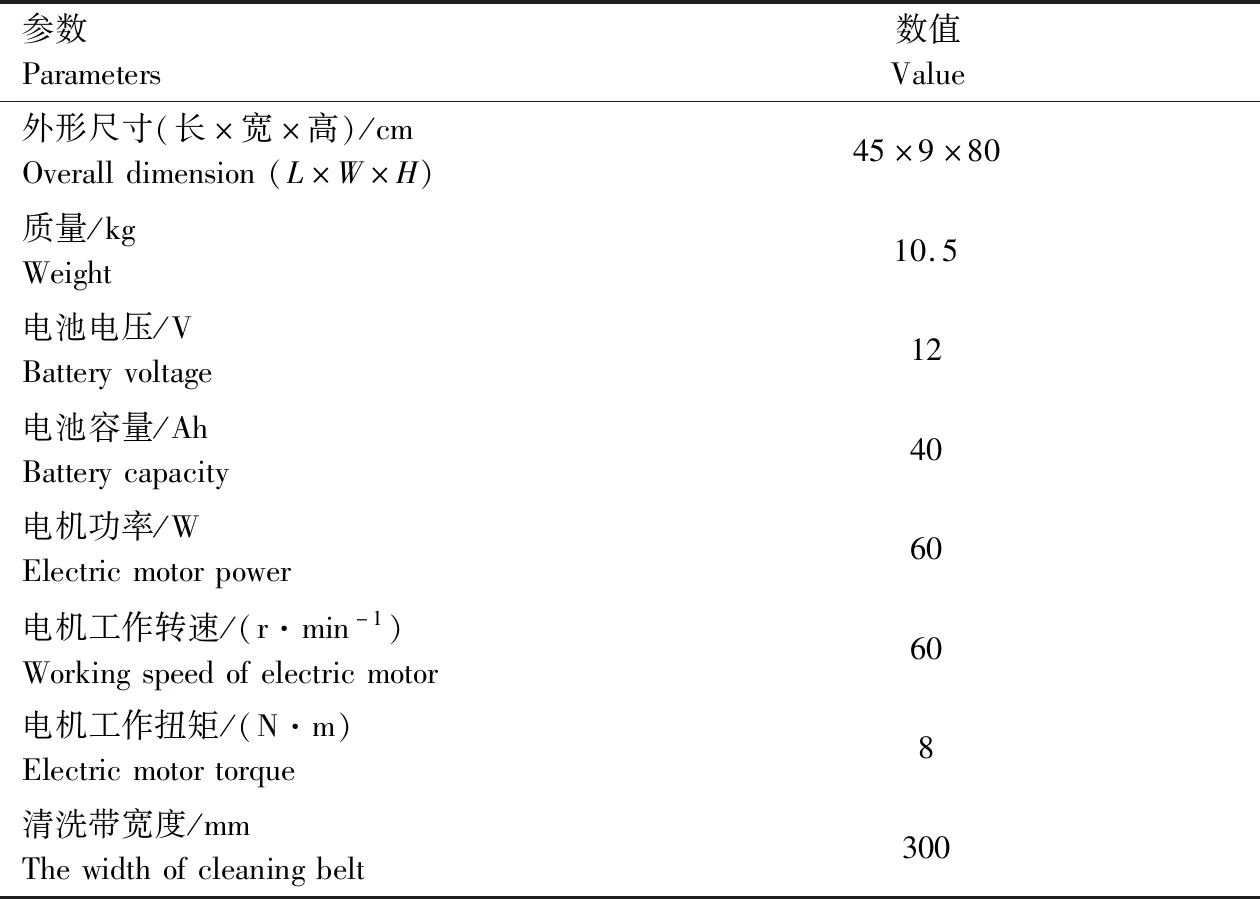
表1 塑料大棚棚顶清洗机主要技术参数表Table 1 Main technical parameters of plastic greenhouse top cleaning machine
l=πdnt
(1)
式中:l为清洗带往复搓拉长度;d为缠绕滚直径;n为缠绕滚转速;t为缠绕滚的工作间隔时间。
影响清洗效果主要因素为单位长度清洗搓拉次数f。f=7~8 次·m-1能保证清洗质量和清洗作业效率。单位长度清洗搓拉次数f如公式(2)所示。f与工作间隔时间t和前进速度V相关。
(2)
式中:f为单位长度清洗搓拉次数;t为主副机缠绕滚工作间隔时间;V为主副清洗机前进速度。
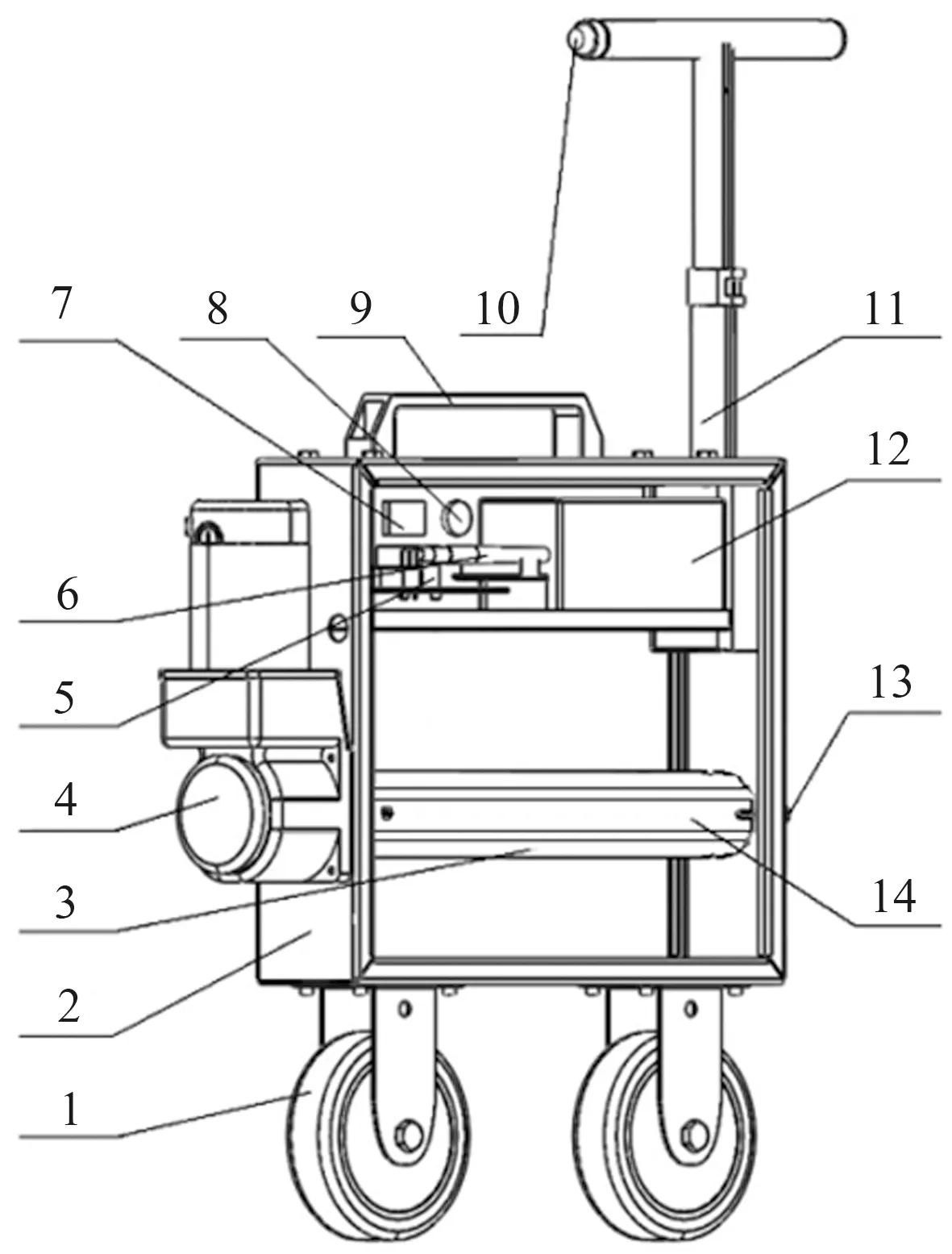
注:1.脚轮;2.框架;3.缠绕滚;4.电机;5.控制器;6.无线收发器;7.调试开关;8.电源开关;9.提手;10.作业开关;11.推杆;12.电池;13.轴承;14.清洗带固定板。Note:1.Wheel;2.Frame;3.Roller;4.Electric motor;5.Controller;6.Wireless transceiver;7.Debug button;8.Power switch;9.Handle;10.Working button;11.Push rod;12.Battery;13.Bearing;14.Cleaning belt fixing plate.图2 塑料大棚棚顶清洗机主机的结构Fig.2 Main machine structure of plastic greenhouse top cleaning machine
1.3 塑料大棚棚顶清洗机控制系统设计
本研究设计的塑料大棚棚顶清洗机控制系统如图3所示。主机和副机各有一套控制器,分别为主控制器和副控制器。主控制器和副控制器均使用PIC18F248单片机,该单片机具有指令集小、功耗低、运行速度快、体积小和抗干扰能力强等特性。按下调试开关,主控制器和副控制器可分别控制主机电机和副机电机的转动方向和转动时间,以调整清洗带的松紧度。作业时,按下主机上的作业开关,主控制器和副控制器通过无线发射器和无线接收器传递指令,使2个电机始终保持同步转动和同时换向。无线发射器和无线接收器均使用DMX512型高速无线收发器,该无线收发器具有接收和发射的双重功能,采用2.4G国际通用无线频段,具有高效发射、高灵敏接收精确控制和抗干扰能力强等特性。无线收发器和控制器利用串行通信协议(controller area network,CAN)进行通信。
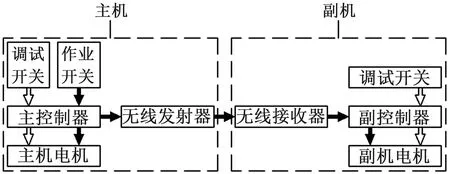
图3 塑料大棚棚顶清洗机控制系统Fig.3 Control system of plastic greenhouse top cleaning machine
2 塑料大棚棚顶清洗机测试试验
2.1 清洗机测试试验设计
测试试验于2020-10-12在河南省禹州市双庙乡育苗工厂进行。进行测试的弓型塑料大棚宽度为8 m,高度为3 m,长度为30 m,人可在大棚之间的天沟内行走。大棚已使用1 a,离公路约50 m,棚顶表面积尘较多。试验采用TES-1330A型数字照度仪检测光照度。试验配套有相应的喷水装置,喷水装置主要包含水源、水箱、水泵、水管和喷头等简易设备,可根据实际情况而定。本次试验采用普通PVC软管,一端接在水龙头上,一端对着清洗带喷水。
试验主要测试单位长度清洗搓拉次数f对清洗效果和清洗作业效率的影响。取7种状态的f值进行测试。为了保证试验的准确性,在每种状态的f值下测试3次,每次测试区间长度为2 m。每次清洗测试前,在测试区间内取样3点并标记,然后使用TES-1330A型数字照度仪检测3个取样点处的外部光照度和对应的棚内光照度,分别取其平均值并记录。在清洗测试后,再用TES-1330A型数字照度仪检测3个取样点处的棚内光照度,取其平均值并记录。透光率为棚内外光照度平均值的比值。同时记录每次测试的时间,以方便计算作业效率。清洗作业效率如公式(3)所示。其中,本次试验设定每次作业长度S为2 m,清洗带有效长度L为8 m。
(3)
式中:η为清洗作业效率;S为每次清洗作业长度;L为清洗带的有效长度;T为每次清洗作业完成时间。
2.2 清洗机清洗试验结果
试验时3个人配合操作,2个人分别把持塑料大棚两侧的主机和副机,匀速向前移动,第3个人手持水管出水端向塑料大棚棚顶正在工作的清洗带喷洒清水。使用TES-1330A型数字照度仪检测试验前后棚内外光照度。每个试验状态重复试验3次,试验结果如表2所示。随着单位长度清洗搓拉次数f增大,清洗效果提高显著;但当透光率达到临界值后,清洗效果不再随着f增大而增大。这是因为在清洗开始阶段,塑料大棚棚顶的塑料薄膜表面灰尘较多,随着f增大塑料薄膜被来回擦拭的次数增加,其表面浮尘被清除的同时,黏着的尘垢也被摩擦掉。随着塑料薄膜表面的污染物被清理干净,透光率已经接近塑料薄膜本身的透光性能,便不再随着f增大而增大。此外,随着单位长度清洗搓拉次数f的增大,清洗作业效率降低。这是因为在设定主机和副机缠绕滚换向间隔时间t后,f增大意味着完成单位长度清洗作业时间变长,即作业效率降低。因此,综合考虑清洗效果和清洗作业效率,当f=8时清洗效果较好,透光率平均值由53.8%提高至85.1%,此时平均清洗作业效率为11.93 m2·min-1。
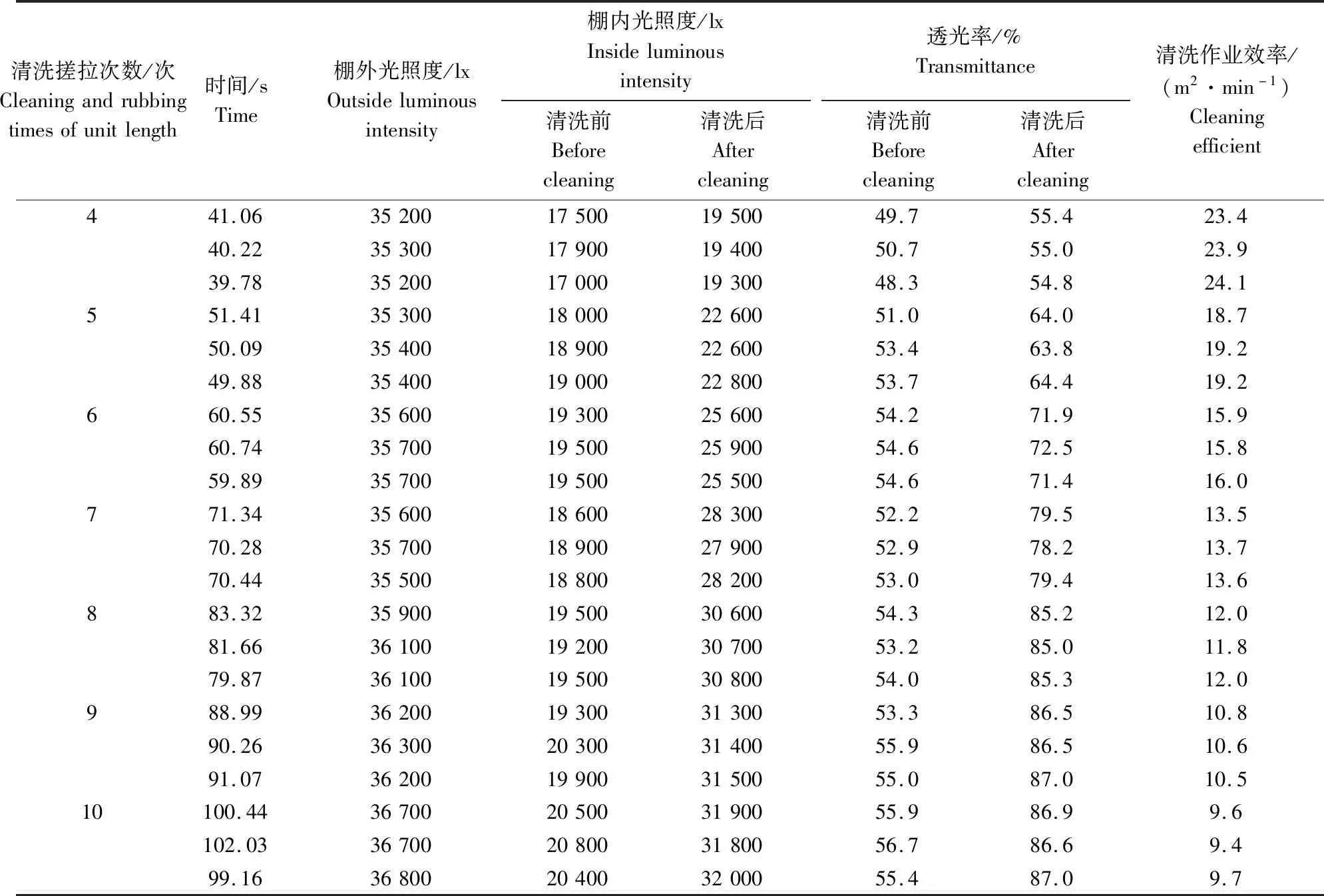
表2 塑料大棚棚顶清洗机的试验结果Table 2 Test results of plastic greenhouse top cleaning machine
3 结论与讨论
本研究结果表明,当塑料大棚棚顶清洗机单位长度搓拉次数f=8时,清洗效果较理想,平均透光率由53.8%提高至85.1%,此时平均清洗作业效率可达11.93 m2·min-1。何培祥等[17]研究的塑料大棚清洗机,在同为3人作业的情况下清洗作业效率6.6 m2·min-1。相比之下,本研究的塑料大棚棚顶清洗机平均作业效率更高,清洗效果更好。
目前,自动化程度高的塑料大棚棚顶清洗机都需要导轨[18]。中国现有的塑料大棚几乎都缺乏该装置,这也是本研究中塑料大棚棚顶清洗机仍需要人工操作的原因。如果改造并增加导轨和喷淋系统,不仅成本投入较高,而且长期维护操作难度较大,不适于推广应用。本研究的塑料大棚棚顶清洗机针对中国弓型塑料大棚现有状态,虽然需要人工参与,但几乎不需要对塑料大棚进行改造即可投入使用,因此可以大大减少成本。此外,中国目前的塑料大棚建造参数各不相同,现有的清洗设备在推广使用时受到限制。李晓贤[19]研究的磁力轮式塑料大棚清洗机受弓型骨架间距的限制,且要求骨架必须为钢制。而本研究的塑料大棚棚顶清洗机在使用时只需要根据塑料大棚的尺寸调整清洗带的长度即可,适用于中国各种建造规格的塑料大棚。本研究的塑料大棚棚顶清洗机单体质量为10.5 kg,体积小,质量轻,方便携带,便于各个大棚之间换向和转移。现有的塑料大棚棚顶清洗机大多体积大,质量大,不利于转移,同时有的清洗机主机在作业时取下或放上棚顶时较麻烦[20]。而本研究的塑料大棚棚顶清洗机在塑料大棚之间转移时,只需把质量较轻的清洗带放在棚顶,然后调整好松紧度后即可作业。此外,塑料大棚棚顶塑料薄膜承载力较低,质量较大的清洗机在塑料薄膜上移动时会使塑料薄膜发生变形,特别是钢轮经过骨架时会产生碾压痕迹。赵健等[21]设计的塑料大棚清洗机需要整个设备在塑料大棚上沿着纵向杆行走,且履带轮作用在塑料薄膜上,理论上对塑料薄膜有损伤。而本研究的塑料大棚棚顶清洗机,只有质量很轻的柔性清洗带在塑料大棚棚顶上作业,对塑料薄膜几乎无损伤。本研究的塑料大棚棚顶清洗机结构简单,制造成本低,易于批量生产和市场化推广。
猜你喜欢
中国农机化学报(2022年9期)2022-08-17
农业工程学报(2022年6期)2022-06-27
黑龙江粮食(2022年4期)2022-05-25
锻压装备与制造技术(2022年2期)2022-05-11
小猕猴智力画刊(2021年8期)2021-08-27
北京理工大学学报(2020年5期)2020-06-09
东坡赤壁诗词(2018年4期)2018-11-07
中国建筑防水·悦居(2017年4期)2017-05-12
江苏农业科学(2016年10期)2017-02-05
科学与财富(2016年28期)2016-10-14