
基于车路协同的特种车辆绿波通行
2022-06-24 11:23:32林睿睿孙晓楠岳小泉张可欣连培昆
福建工程学院学报 2022年3期
林睿睿,孙晓楠,岳小泉,张可欣,连培昆
(福建农林大学 交通与土木工程学院,福建 福州 350002)
已有的固定配时方案信号灯控制系统仅考虑社会车辆通行效率最优而忽略了特种车辆执行任务时的紧急性,虽然执行任务中的特种车辆可以获得优先通行权,但闯红灯终究是危险的,因此如何解决特种车辆快速通行是不容忽视的问题。当前许多学者对特种车辆绿波通行展开了相关研究,强成[1]通过分析特种车辆行车特性,研究不同交叉口下的特种车辆信号优先。豆雪珊[2]设计了一种主动自适应交叉口优先控制策略,实现应急车辆优先通过和通过后信号配时平滑恢复。董争[3]等分析军车城市道路通行绿波信号保障需求,提出绿波保障连续性分析处理方法和军车城市道路通行绿波信号保障应用条件。Khaled Shaaban[4]等开发了一种最佳路径选择和特种车辆优先的联合策略,在特种车辆到达前清理交叉路口。牟海波[5]等研究了应急车辆信号优先转换回正常运行状态的控制策略。黄敏[6]等提出一种基于双层规划模型的应急车辆优先通行策略,综合考虑应急车辆的时效性以及交通系统的运行效率。郑林辉[7]基于车联网环境交通特性,结合路段车辆让行、交叉口信号控制为应急车辆提供优先通行服务。范宽[8]等利用警报声来识别特种车辆所在的车道,从而保证特种车辆的优先通行。张立立[9]等指出解决应急车辆优先通行的两个核心问题是应急车辆的优先控制和优先控制与路径规划的相互作用。
目前大部分研究从路径规划、交叉口信号协调控制着手,实现特种车辆绿波通行。本文旨在信号控制基础上,通过设置合理的检测器位置,更快做出判断,实现特种车辆绿波通行,减少行程时间。
1 绿波通行方案
1.1 绿波机制
在特种车辆上安装定位及信号接收发射装置,实现特种车辆当前位置的准确定位,方便执行任务时向信号灯控制中心发出优先通行请求,并在所有交叉口的上下游合适位置设置特种车辆信号检测器,通过检测装置与特种车辆行驶速度估计出特种车辆到达前方交叉口所需运行时间。当检测到特种车辆即将到达相应交叉口时,检测器将消息传送到交通管理部门,经交通管理部门同意后,再将控制指令发送到信号灯控制中心,调整当前信号灯配时方案。
通过绿灯延长或红灯早断策略来实现特种车辆绿波通行,特种车辆通过后及时进行信号配时的恢复,且在之后的执行相位中对前一相位进行信号补偿,以保证信号配时周期维持不变。
假设通过修改调整相位的策略来维持特种车辆绿波通行的前提是特种车辆保持正常行驶速度,不会发生速度改变,则相位变化时间有以下约束:

(1)
式中,Tq为排队消散时间,s;q为车辆排队数,辆;c为通行能力,辆/h;λ为车辆到达率,辆/h。

(2)
式中,t为特种车辆行驶到交叉口的时间,s;S为特种车辆到交叉口的距离,m;V0为特种车辆正常行驶速度,km/h。
(1)Tq>t,前方排队未消散,则分为以下两种方案:
前方相位为绿灯:采用绿灯延长方案,相位调整时间T=Tq-t;
前方相位为红灯或黄灯:采用绿灯提前方案,相位调整时间T=Tq-R,R为剩余红灯时间,s;
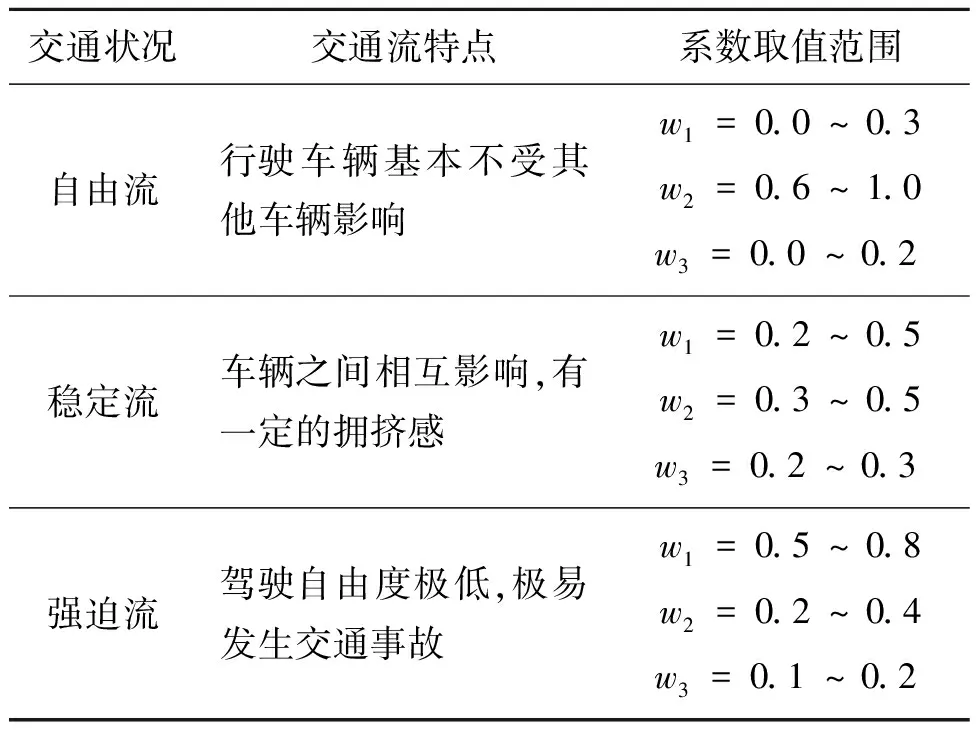
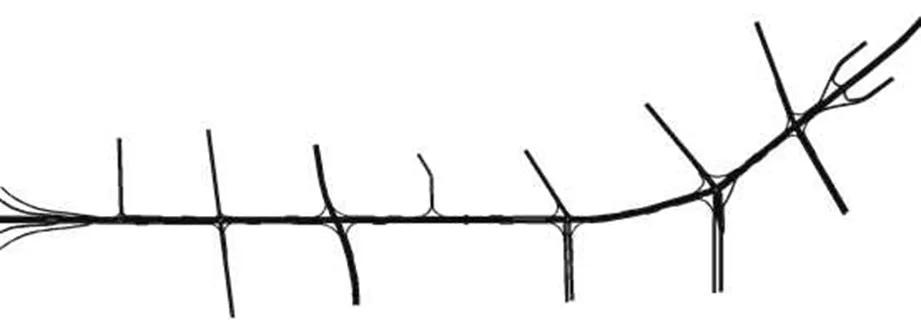
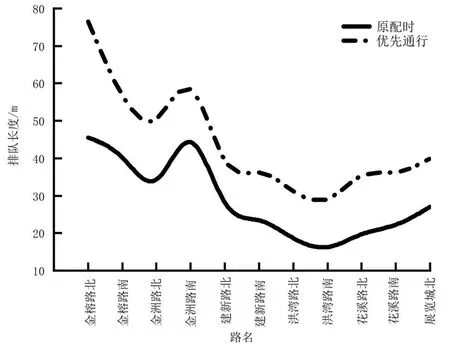
(2)Tq 图1 车速引导示意图Fig.1 Schematic diagram of vehicle speed guidance 当特种车辆行驶到位置①时,检测装置将前方绿灯倒计时时间反馈到特种车辆上,用于估算特种车辆该加速多少;特种车辆到达位置②时开始加速,达到一定速度后,正好在位置③的时候跟上前方车队并在剩余绿灯时间里通过交叉口。 速度引导约束条件如下: (3) V0 (4) 式中,V特为特种车辆调整后速度,km/h;a为特种车辆加速度,km/s2;G为剩余绿灯时间,s;m为检测装置到交叉口停车线的距离,m。(注:法规上规定特种车辆执行任务时无车速限制,但金山大道限速70 km/h,出于安全考虑,本文规定特种车辆车速上限不超过1.2V0) 不论是通过信号配时调整还是速度引导,检测器位置均需设置合理,检测器的位置可通过下面公式计算: (5) 式中,V为车队最后一辆车通过交叉口的速度,km/h。 检测装置到交叉口停车线的距离m的约束条件为: (6) 式中,T为信号周期时长,s;v为特种车辆行驶速度,km/h;L为特种车辆前方车队长度,m。 行驶过程存在其他社会车辆影响,为保证调整后特种车辆能顺利通过交叉口,往往在调整时间上增加3 s。 当检测到有特种车辆即将到达交叉口时: (1)单辆特种车通过交叉口 如果特种车辆通行方向为绿灯相位,则判断特种车辆通行所需时间是否大于剩余相位时间,若否,则按照当前车速正常行驶即可通过交叉口;若大于,在保证安全的情况下加速通过交叉口;如果达到最高行驶车速还是不能在绿灯相位内通过交叉口,则短暂延长绿灯,保证特种车辆可以通过当前交叉口,随后重新检测是否有特种车辆到达。 如果特种车辆通行方向为红灯相位,则判断特种车辆到达交叉口的所需时间,若时间大于剩余红灯时间,即红灯相位继续;若小于,则应转变为绿灯,疏通特种车辆前方排队车辆,保证特种车辆顺利通过交叉口,随后重新检测是否有特种车辆到达。 (2)多辆特种车通过交叉口 当特种车辆同方向来车时,如果行驶方向信号为红灯,则该方向的信号相位按第一辆到达特种车实施信号优先相位,直到最后一辆特种车通过交叉口为止。如果行驶方向信号为绿灯,则绿灯延长至最后一辆特种车辆通过。 当特种车辆通行方向冲突时,通过控制中心判断特种车辆到达顺序,若同时到达,则分为对向车道来车和相交车道来车。若为对向车道,提前清空两个路口直行道车辆,然后按照交通规则,右转让左转,左转让直行原则让特种车辆通行。若为相交车道,按照顺时针顺序,路口1清空直行车道车辆,路口2清空左转车道车辆,然后按照交通规则,右转让左转,左转让直行原则让特种车辆通行。若不是同时到达,按照先到先通行顺序进行信号灯控制。 在评价交通流运行状态时常用到的评价指标有流量、停车次数、平均延误时间等。特种车辆在路面上的交通量较少,因此流量不适于作为本文的评价指标。且特种车辆执行任务过程中,需要其它车辆避让来保证特种车辆绿波通行,因此本文选取社会车辆排队长度L、特种车辆平均延误时间D、行程时间T来评价本文所提通行策略的效果。参考文献[10]建立了评价模型: W=w1×T+w2×L+w3×D (7) w1+w2+w3=1 (8) 式中,w1、w2、w3表示非负的权重系数,具体取值范围如表1所示。 表1 权重系数的确定 实验仿真对象为金山大道高峰时段交通现象(即强迫流状态)。金山大道作为福州市众多道路中一条重要的主干道,经过梅花楼、花溪、洪湾、建新、金洲、金榕6条路,形成6个主要交叉口,早晚高峰时期常有堵车现象出现。 金山大道与金榕路、金洲路、建新路、洪湾路、花溪路及福州展览城形成的交叉口见图2。 图2 金山大道路网图Fig.2 Jinshan Road network 高峰时段金山大道交通量较大,此时各条道路均出现拥堵情况,因此以各交叉口次干路方向的社会车辆平均排队长度与特种车辆通过金山大道所需时间以及延误来进行分析。各交叉口次干路的平均排队长度折线图见图3。 图3 各交叉口次干路的平均排队长度对比折线图Fig.3 Comparison of the average queuing length at each intersection of the secondary roads 由图得出,实行特种车辆绿波通过后,各交叉口次干路平均排队长度都有增加,对比原配时方案下的排队长度,实行特种车辆绿波通行导致的排队长度增加属于可接受范围。 通过仿真验证,在现状交通信号灯配时方案下,特种车辆经过金山大道全段路程所需时间852 s,延误时间687 s,而本文提出的控制策略进行特种车辆绿波通行后,车辆通过金山大道所需时间仅198 s,大大提高特种车辆执行任务的效率。 本次仿真目标是高峰时段金山大道的通行情况,处在强迫流时评价模型中行程时间权重较大,取w1=0.5、w2=0.4、w3=0.1,通过式(7)计算,W1=813.4,W2=293.08。实行特种车辆绿波通行方案后的评价指标优于原配时方案,总体达到预期的控制效果。我国驾驶员在等待红灯的极限时长约80 s,本文提出方案相位调整时间未达极限时长一半,且国家的法律规定社会车辆要为执行任务的特种车辆让行,因此属于可接受方案。 本文以特种车辆绿波通行为主要目标,更快地检测车辆的到达并对信号灯相位做出调整,在不改变信号配时周期的前提下,控制信号灯提前或延长特种车辆所在方向绿灯相位,以及车速引导来实现特种车辆绿波通行,极大程度地减少特种车辆在救援过程中的行程延误,保证紧急救援的实现。并以福州市仓山区金山大道及所包含的交叉口各次干道验证本文提出的方法。最终通过VISSIM仿真验证,本文所提方案以增加2~3辆的社会车辆排队为代价,缩短了81%特种车辆通行时间。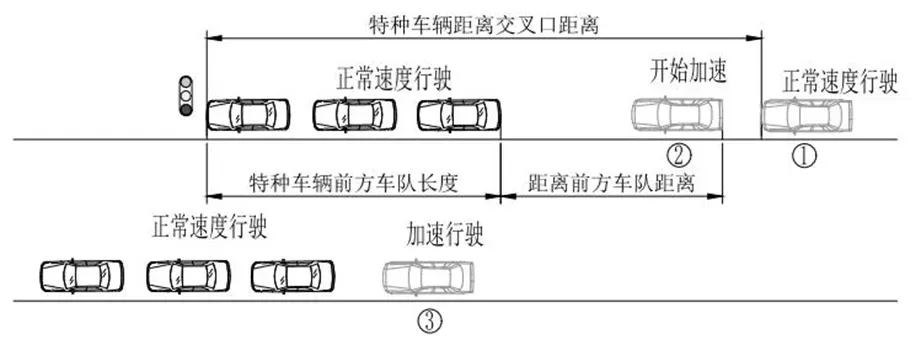


1.2 通行流程
1.3 评价模型
2 仿真验证
2.1 交通基础情况
2.2 仿真评价
3 结论
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20东坡赤壁诗词(2019年5期)2019-11-14 10:36:10重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36中国房地产业(2016年2期)2016-03-01 01:25:37系统工程学报(2015年3期)2015-02-28 19:54:01食品与生活(2014年9期)2014-09-27 16:25:30河南科技(2014年14期)2014-02-27 14:12:02吉林大学学报(工学版)(2013年1期)2013-08-16 07:16:48中国火炬(2010年5期)2010-07-25 07:48:00
