
飞机大迎角飞行问题研究综述
2022-06-24 07:21张子军赵彤孙烨李宏信
航空工程进展 2022年3期
张子军,赵彤,孙烨,李宏信
(1.航空工业沈阳飞机设计研究所总体气动部,沈阳 110000)
(2.南京航空航天大学 航空学院,南京 210016)
0 引言
现代空战虽然以超视距作战为主,但受导弹命中率的限制,以及复杂战场态势下敌我识别精度的影响,近距格斗在未来的空战格斗中仍不可避免。对于战斗机近距格斗能力的需要在美国F-22、F-35与俄罗斯Su-35、Su-57等先进战机的设计理念中都有不同程度地体现。
飞机一旦进入近距格斗的单环战或双环战,飞行员总期望自己的飞机以更快的角速度获取迎头攻击占位优势或迫使敌方提前退出缠斗而获得尾后追击的优势。更快的角速度意味着更大的过载与迎角,因此在近距空战中,飞行员都会有意或被迫地使飞机进入大迎角飞行状态。大迎角飞行问题是现代战斗机设计必须考虑和解决的重、难点问题。
从公开发表的文献来看,大迎角相关单项技术研究较多,而面向工程的综合论述较少,本文针对战斗机设计过程中所面临的大迎角问题,从大迎角气动特性出发,结合飞机大迎角设计流程所包含的风洞试验、动力学分析、控制律设计以及飞行试验等方面工作展开论述,通过总结已有研究成果,归纳大迎角后续研究方向,以期为进一步推动大迎角问题研究的发展。
1 大迎角气动特性
1.1 大迎角飞行特性
飞机进入大迎角后,不仅伴随着气动力系数的非线性变化,还会出现抖振、机翼摇晃、翼落、操纵反向、航向发散、过载突然下降等现象。这些现象,与大迎角下气动阻尼丧失、非对称、气动力迟滞等大迎角流动特性密切相关。
1.2 气动阻尼丧失
气动阻尼丧失是大迎角流动的一种普遍现象,这体现在迎角增大动导数的符号将会出现由负(稳定)到正(不稳定)的变化。其中一个典型例子就是飞机进入大迎角后出现的机翼摇晃。
80°后掠三角翼自由滚转试验如图1所示,可以看出:存在两个稳定的极限环,其中一个是大振幅周期振荡,对应机翼摇晃状态。
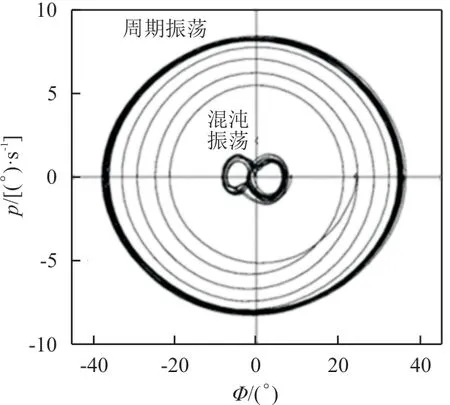
图1 80°后掠三角翼自由滚转试验[6]Fig.1 Free roll test of 80°swept delta wing[6]
1.3 大迎角气动力非对称
具有细长前体布局的典型二、三代战斗机即便是零侧滑,在大迎角时也存在较大的偏航力矩。典型细长体在水洞中不同迎角下的流场结构流动显示结果如图2所示。当迎角提升至48°,背风面形成稳定的对称涡;继续提升至60°,背面风变成了非对称涡,这种非对称涡是飞机在大迎角出现不对称偏航力矩的主要原因。
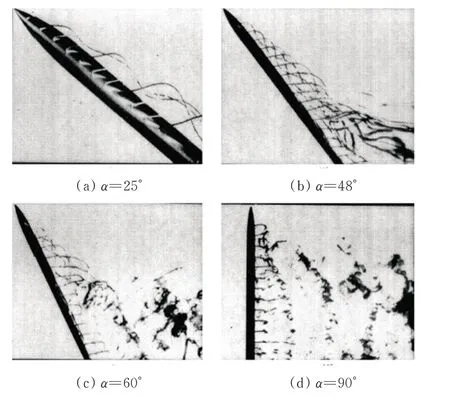
图2 细长体在不同迎角下的流动特点[7]Fig.2 Flow characteristics of slender bodies at different angles of attack[7]
试验发现,前机身截面形状对前体涡流场有较大的影响。相较于三代飞机近似圆锥型前机身,四代飞机菱锥机头减弱了气动力不对称现象。典型三代飞机与四代飞机不对称偏航力矩的对比如图3所示。
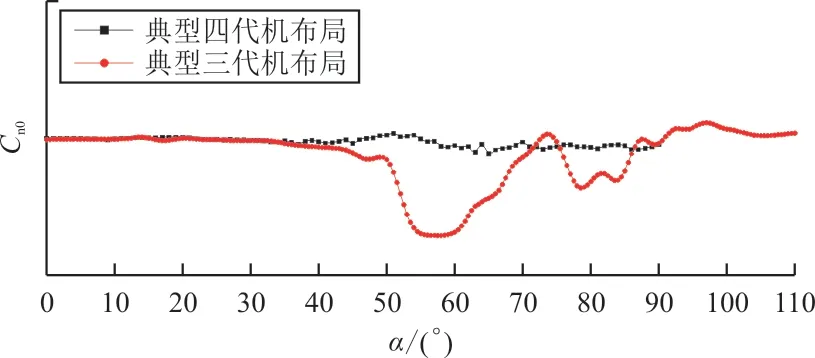
图3 典型三、四代不对称偏航力矩系数对比[7]Fig.3 Comparison of asymmetric yaw pitch coefficient between the 3rd and 4th generation aircraft[7]
飞机在机头加装空速管后,由于空速管产生的涡与飞机前体涡相互作用,使偏航力矩在迎角30°~50°范围内出现振荡特性,如图4所示。
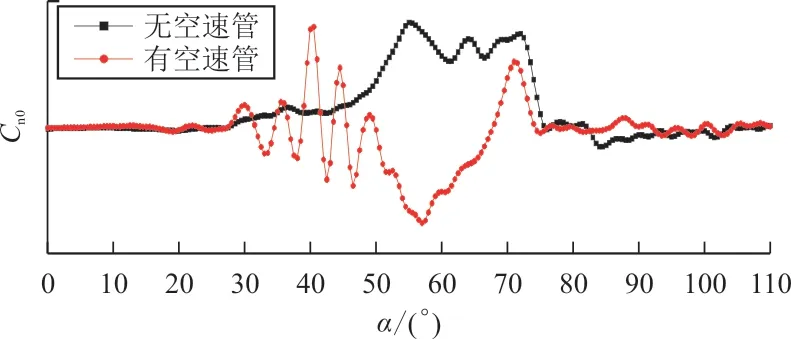
图4 有无机头空速管的不对称偏航力矩系数对比[7]Fig.4 Comparison of asymmetric yaw pitch coefficient with or without nose boom[7]
1.4 气动力迟滞
气动力迟滞现象是指迎角增大(̇>0)与减小(̇<0)时气动力出现非单值现象。此时,气动力表现出与频率和幅值的严重依赖关系。当迎角变化时,迎角增加所形成的气流分离区与迎角减小形成的恢复区之间,存在气动力迟滞现象,如图5所示。
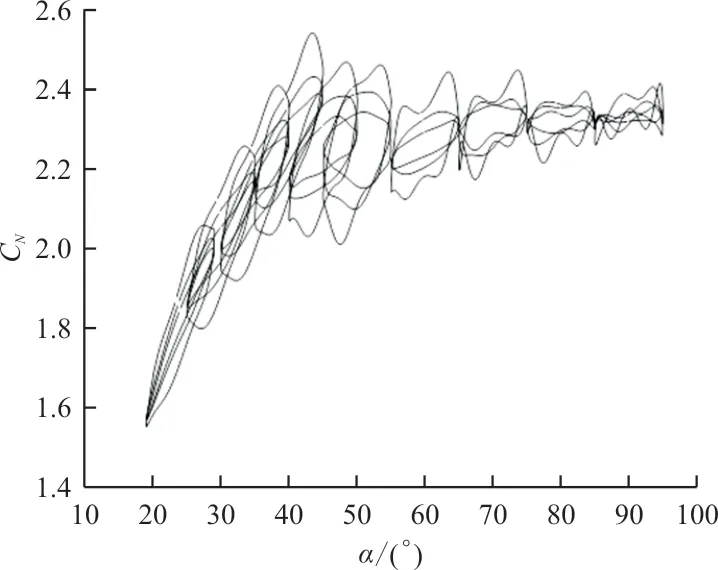
图5 某型飞机的气动力迟滞现象Fig.5 Aerodynamic hysteresis of an aircraft
2 大迎角风洞试验与建模方法
2.1 风洞试验
大迎角风洞试验包括静态测力、强迫振荡、旋转天平、立式风洞试验以及风洞虚拟飞试验和风洞自由飞试验等。静态测力、强迫振荡、旋转天平试验主要用于获取建立大迎角气动模型所需的气动数据,立式风洞、风洞虚拟飞与风洞自由飞由于释放了一个以上的自由度,可以用于研究飞机失速、偏离、尾旋等动态特性。
2.1.1 静态试验
大迎角静态测力试验是构建大迎角气动数据库,获取飞机静稳定导数的基础。结合动态偏航发散参数判据(C)、横侧操纵偏离参数(LCDP)判据、+轴稳定性判据、Weissman组合偏离判据,可帮助设计人员尽早地了解飞机大迎角特性,以便及时更改相关设计。
J.Chambers对若干型飞机的大迎角气动 力试验进行了经验总结,不同尺寸模型风洞试验所得航向静稳定性的差异情况如图6所示。为了减小雷诺数、支撑干扰等因素的影响,应尽量选择较大尺寸模型。
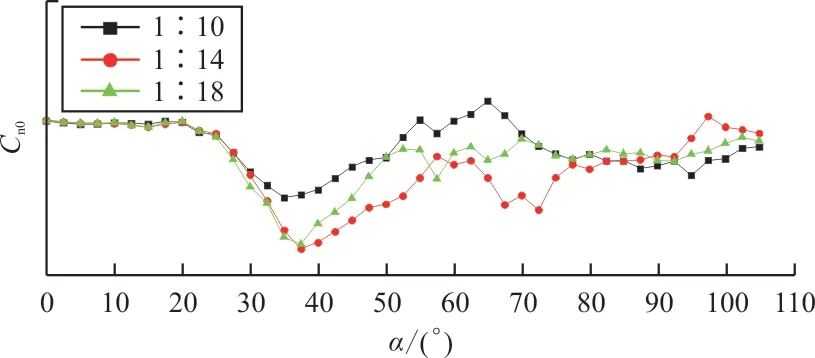
图6 不同尺寸模型静态风洞数据对比[10]Fig.6 Comparison of static wind tunnel data of different size models[10]
2.1.2 强迫振荡试验
强迫振荡试验用于获取飞机大迎角状态下的动导数据。通过仿真发现,动导数据对于尾旋模态有重要影响,这与文献[11]的结论是一致的。某型飞机俯仰阻尼、滚转阻尼、偏航阻尼以及交叉阻尼在标称值附近摄动的尾旋蒙特卡罗仿真结果如图7所示,可以看出:动导摄动对能否进入稳定尾旋以及尾旋偏航角速率产生了影响。

图7 动导数摄动下尾旋蒙特卡罗仿真结果Fig.7 Monte Carlo simulation results of aircraft spin on condi-tion of perturbation in aerodynamic derivatives
2.1.3 旋转天平试验
旋转天平试验是进行高逼真度尾旋仿真必不可少的试验。试验一般采用固定来流速度、迎角和侧滑角,通过改变模型旋转速率,得到模型的气动力和力矩随的变化关系。通常来说,旋转天平试验要求如下:
(1)试验迎角范围20°~90°;
(2)侧滑角范围-20°~20°;
(3)旋转速率变化范围-0.3~0.3(°)/s;
(4)试验内容应考虑外挂武器及舵面偏转(极限状态)带来的影响。
由旋转天平试验数据计算所得滚转力矩与实际尾旋滚转力矩的相关性以及两者的差量如图8所示。通过研究发现,旋转天平试验在预测滚转、俯仰力矩时精度较高,因此试验点间隔可稍大,而对偏航力矩则需进一步加密试验网格点。另外在型号设计过程中,可先期开展立式风洞试验获取飞机尾旋的典型模态,优化好主要的试验参数后再进行旋转天平试验。
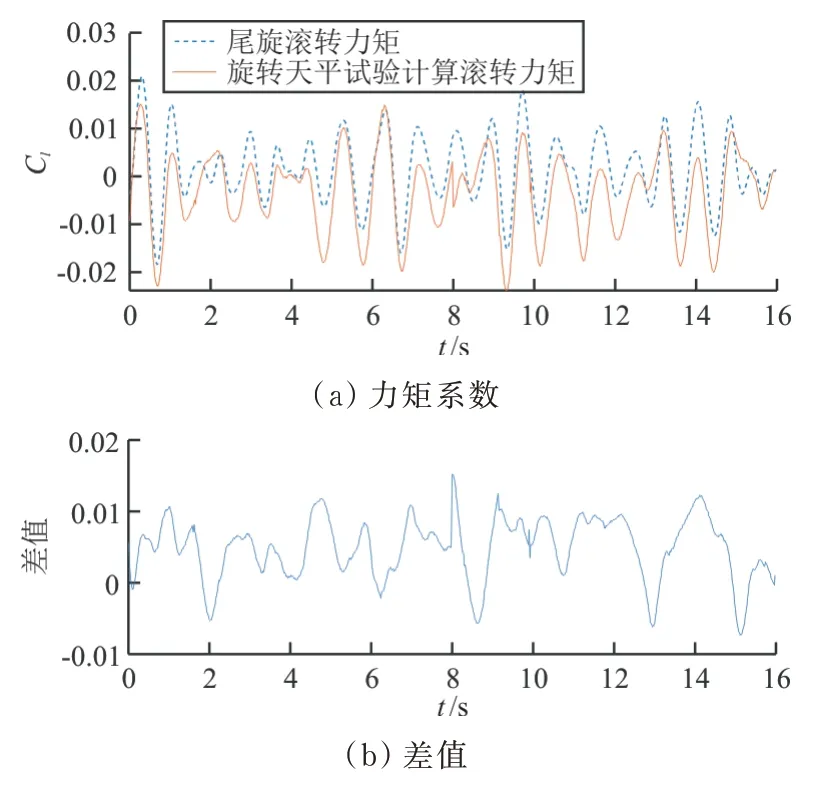
图8 旋转天平数据与立式风洞数据对比Fig.8 Correlation of rotary balance data and wind tunnel experiment data
2.1.4 立式风洞试验
立式风洞试验是一种特殊形式的风洞试验,主要用于确定尾旋特性和尾旋改出的操纵方法。目前国内的立式风洞为中国空气动力研究与发展中心于2005年建成的5 m立式风洞。在进行立式风洞试验时,应该考虑多种舵面组合形式,必须获取在最不利舵面配置下的尾旋模态和改出方法。立式风洞还可以用来进行反尾旋伞选型与初期的效能评估,C.M.Fremaux详细地介绍了开展立式风洞尾旋试验的详细流程。
结合参数辨识技术,立式风洞试验可以定量地获取动态气动力,以此开展气动力模型修正工作。基于立式风洞试验,C.M.Fremaux给出了一种估算尾旋时气动力矩的方法,由立式风洞试验获取的某型飞机尾旋过程中的俯仰力矩系数随迎角的变化情况如图9所示。
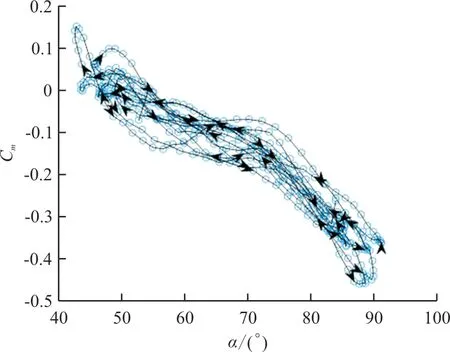
图9 俯仰力矩随迎角变化Fig.9 Pitching moment varies with angle of attack
2.1.5 风洞虚拟飞行试验
风洞虚拟飞行试验最早由M.E.Thomas等提出,通过在试验段释放模型若干自由度来实现较为逼真的机动运动过程,能够模拟气动力对飞行器的作用及其产生的姿态运动响应,并且模拟与运动历程相关的复杂气动力作用,特别适合用于飞行器失速偏离特性的研究。
M.H.Lowenberg等研制了 钟 摆 形运动 机构,并基于单自由度及二自由度俯仰运动研究,发现了极限环振荡现象。俄罗斯中央空气流体动力学研究院(Central Aerohydrodynamic Institute,简称TsAGI)发展了背撑三自由度动态机构,开展大迎角下机翼摇晃现象及控制问题研究。
国内,中国空气动力研究与发展中心为最早开展风洞虚拟飞试验技术研究的单位,取得了一系列成果;中国航天空气动力技术研究院张石玉等开展了类F-16飞行器风洞虚拟飞行试验专题研究,发现在迎角22°以上发生俯仰极限环振荡,迎角为-5°后,发生横航向极限环振荡;南京航空航天大学付军泉等对BWB布局飞行器偏离特性进行了分析,并基于虚拟风洞试验开展了验证工作;中国航空工业空气动力研究院也开展了类似研究。
风洞虚拟飞行试验技术满足了气动/飞行力学/控制一体化设计的研制需求,其试验周期短、费用低,特别适用于需要大量重复试验进行比较及敏感性分析类的研究,该试验有助于飞机大迎角下各种失稳现象的研究、边界的确定与控制律设计、验证和优化,可有效降低研制后期出现重大问题的概率、缩短研制周期、降低研制成本,在新一代军用飞机大迎角问题研究中应给予重点关注。
2.2 大迎角气动力建模
20世纪80年代初,美国开展了F-14飞机的非定常气动力建模及仿真研究。通过数值仿真研究了尾旋进入、发展及改出的时间历程,并同1∶10无动力模型自由飞试验结果进行了对比分析,主要结论如下:
(1)过失速和尾旋进入阶段的预测结果并不好,尾旋的发展阶段及改出的初始阶段预测结果很好;
(2)仿真结果表明旋转天平数据是必要的,只有使用了旋转天平数据,才能较好地预测飞机的尾旋运动;
(3)俯仰阻尼导数C对尾旋特性影响很大,飞机的运动对舵面的使用时机极为敏感;
(4)50°~90°迎角时的静态偏航力矩对尾旋的进入很重要,对发展了的尾旋影响不大。
根据相关文献报道,F-16VISTA/MATV、F-18E/F、F-16XL等在构建大迎角气动力模型时均使用了静态测力、强迫振荡、旋转天平试验数据组合。在实际使用时要对三种数据进行融合,保证消去重叠部分。数据融合的基本思路是将飞机体轴系角速度分量、、合成到沿速度矢的主分量和沿体轴的剩余振荡分量、、,具体的合成方法有直接分解法、KALVISTE法、交替三轴分解法、ERR法以及Goman法等。
M.Austin等对 运 输 机 模 型结 合 直接 分 解法、KALVISTE法、ERR法开展了尾旋仿真,比较了不同融合方法对仿真结果的影响。结果表明尾旋进入受不同分解方法的影响较大;对于稳态尾旋,仿真结果对分解方法不敏感;对于过失速旋转和振荡尾旋,不同方法所得仿真结果差异较大。
为了更好地表征气动力动态迟滞效应,P.C.Murphy等、V.Klein、A.Khrabrov等、M.G.Goman等对非定常气动力建模开展了深入的研究,发展了如Fourier分析减缩频率模型、阶跃响应模型、状态空间模型、微分方程模型等。国内,汪清等对各种非定常气动力建模方法进行了综述。据已有公开报道欧洲SUPRA项目在建模时成功地引入了非定常气动力模型。
3 大迎角动力学分析
3.1 稳定尾旋解
航空工业沈阳飞机设计研究所给出了稳态尾旋的图解法,使用图解法得到了某型飞机稳态尾旋预测结果如图10所示,可以看出:该飞机在迎角65°时存在一个右尾旋平衡点,在迎角53°处存在一个深失速点。
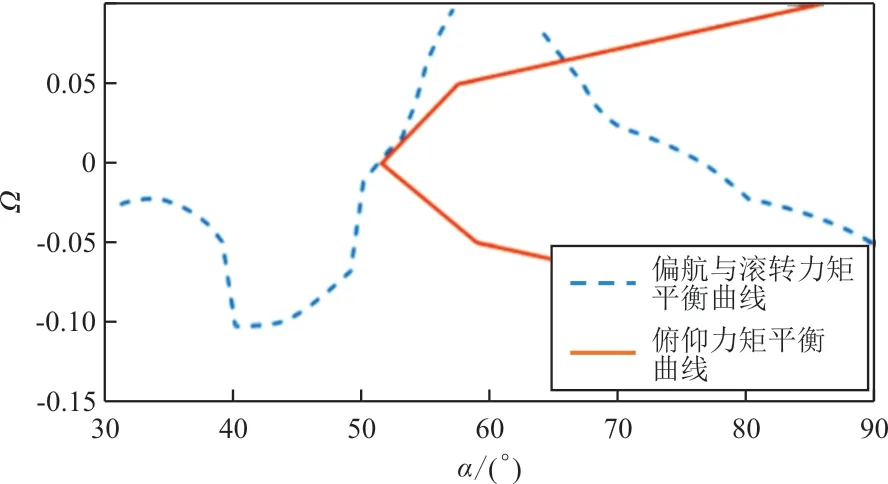
图10 某型飞机大攻角稳定模态的预测结果图Fig.10 The prediction result of the stable mode of a certain type of aircraft at a large angle of attack
通过数值求解飞机6自由度平衡方程得到稳定尾旋解,M.Jehanzeb等给出了不同平尾偏度下,稳定尾旋迎角、旋转角速率随舵面偏度的变化趋势。
3.2 分叉分析
随着非线性系统动力学理论的完善以及非线性计算工具的普及,航空界开始将其中一些研究成果用于飞行器大迎角稳定性分析。1979年R.K.Mehra等首先应用分叉和突变理论方法研究了飞机大迎角快速滚转的稳定性和操纵性,并在后续工作中对飞机的尾旋特性进行了分析;J.Craig等、C.A.Hawkin、N.K.Sinha等开展了针对F-14、F-15、F-18等飞机的分叉分析研究工作;N.Ananthkrishnan等又对标准分叉分析方法进行扩充,形成了扩展分叉分析方法。国内Chen Y L等、高 浩 等、方 振 平 等也 应 用BACTM方法对飞机非线性动力学特性进行了较深入的研究,取得了大量的成果。
分叉分析主要捕捉飞机不同类型的失稳点,给出飞机进入失速、偏离以及尾旋可能的条件,对飞机大迎角动力学给出一种全局直观描述。以某型飞机为例,方向舵和副翼保持中立,升降舵变化时飞机的平衡点分叉特性如图11所示。
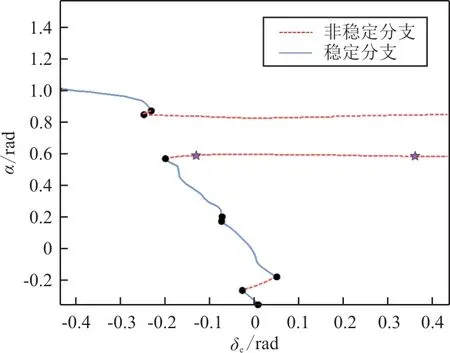
图11 迎角随升降舵偏角变化平衡曲线Fig.11 The balance curve of the angle of attack varying with the deflection angle of the elevator
从图11可以看出:随着升降舵偏角增大,平衡点由大迎角分支向常规迎角分支跳跃。在迎角0.59 rad时出现霍夫分岔点,分岔点代表附近存在周期吸引子,系统会以周期振荡形式响应,疑似机翼滚摆。当升降舵偏角为负数时,飞机在大迎角区域有平衡分支,综合其他参数判断,该分支为深失速分支。
3.3 提高动力学仿真精度的方法
在完成初步的动力学分析后,大迎角研究的重要一环就是进行失速、尾旋动力学仿真,从而为控制律设计、以及后续的飞行试验做好准备,这要求动力学仿真模型具有较高的逼真度。然而大迎角风洞试验更易受风洞流场特性影响,导致试验测试数据离散度大,支架、洞壁等干扰影响修正难度更大,加上效应对气流分离特性影响显著,小尺寸模型与大尺寸真机存在差异。因此仅凭地面试验所构建的气动模型难以准确地表达飞机在大迎角条件下的真实受力情况,必须通过试飞等手段对气动力模型进行修正,完成建模/修模/验模的循环迭代,最终形成高精度的气动模型。
在模型校准时,可以采用试飞数据与仿真数据同源对比(如图12所示)结合参数辨识的方法,按照先纵向、后横侧向,先静态、后动态,最后非定常的顺序,依次完成气动力模型的校核,逐步提高模型各分量的精度直至响应与实际情况满足一致性要求。
据中正舆情中心博客提供的数据显示,该事件舆论发酵的路径经历了从自媒体介质到传统媒体平台的过程。 事件起始,微信平台开始流传事件消息,内容为死者母亲见到尸体哭泣、当日下午拍摄的诉说“孩子在学校没有人身安全”的视频片段与截图、T中学群众聚集的照片等。 这些内容随后迅速扩散到网络空间,传播内容以赵某“被校霸打死的‘内幕’”为主,甚至出现了多种针对政府部门包庇凶手的流言。 自媒体的极速传播迅速带动了传统平面媒体的介入,包括人民网、中国新闻网、中国青年网、中国经济网、中国广播网、澎湃新闻、腾讯、网易、搜狐、新浪等众多新闻网站都对该事件进行了报道。[4]
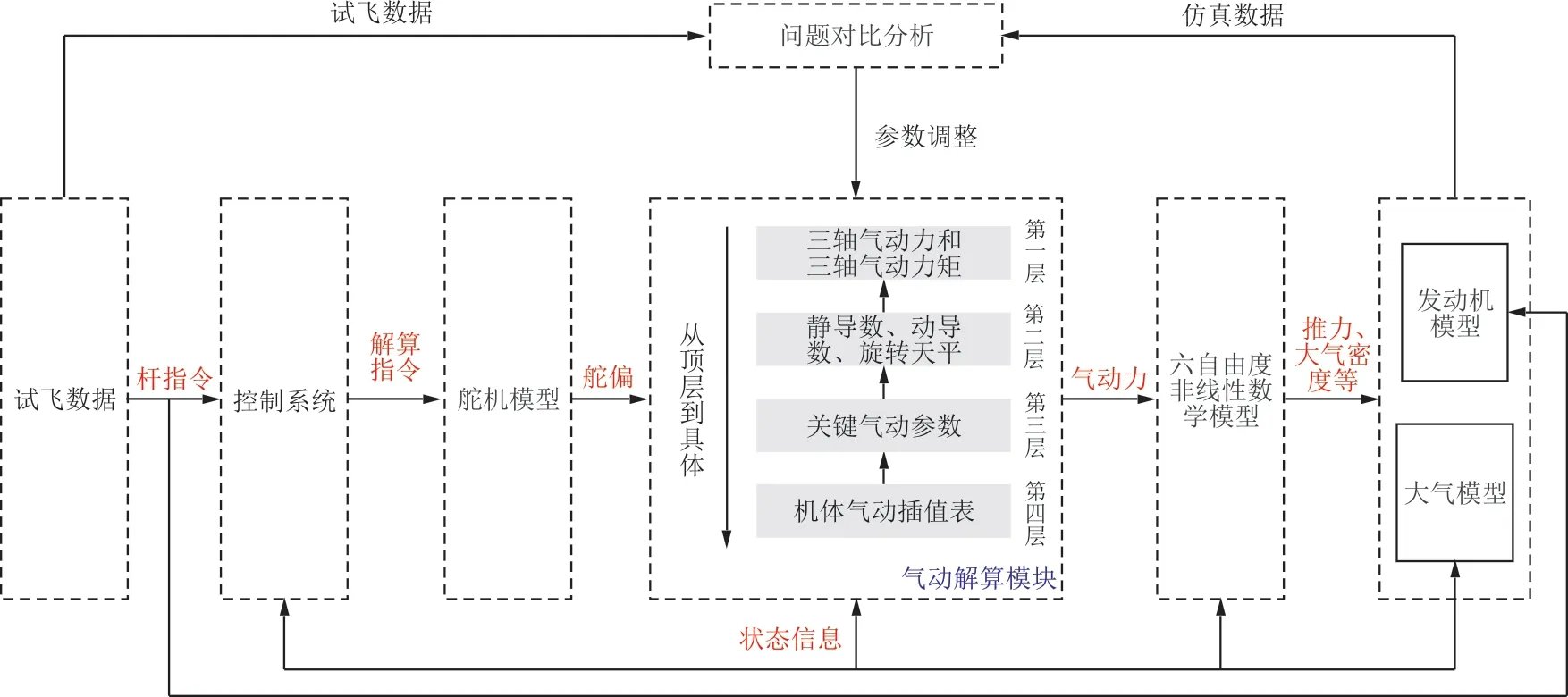
图12 基于同源对比的气动力修正示意图Fig.12 Schematic diagram of aerodynamic model modification base on simulation and flight data
代尔夫特理工大学开发了一种可以进行高保真飞机失速仿真的方法,经过修正后的动力学模型体轴系角速度仿真结果与立式风洞试验的对比如图13所示。
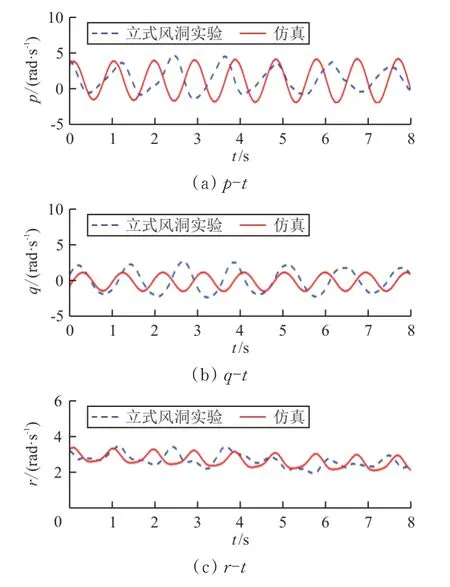
图13 立式风洞试验与修正后模型仿真结果的对比Fig.13 Correlation of wind tunnel experiment data and simulation with model modified
4 大迎角控制律设计
4.1 迎角限制
20世纪70年代前迎角限制通常采用“抖杆器”“推杆器”等“硬限制”,随着电传技术的发展,出现了“软限制”方式。迎角软限制功能有多种实现方法,如附加迎角反馈限制方式、“取最大值”逻辑限制方式、“四条线”限制方式等。
附加迎角反馈限制方式控制律原理如图14所示,在控制律内环引入迎角反馈,通过间接改变驾驶杆到舵面增益来实现对迎角的边界限制。
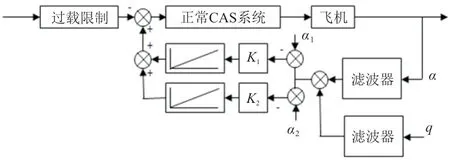
图14 附加迎角反馈限制方式控制律原理[55]Fig.14 Control law principle of additional angle of attack feedback limitation mode[55]
这种迎角限制器优点是通过二级折线式软限制方式实现迎角限制功能,通过改变二级折线转折点和反馈增益,可以尽量发挥飞机机动能力和不同速压下迎角限制。缺点是采用迎角反馈,容易造成系统的稳定储备不足,另外此方法无法实现最大负迎角限制。
“取最大值”逻辑限制方式控制律原理如图15所示。取大值比较逻辑进行动态比较,当迎角限制反馈信号大于过载反馈信号时,采用指令迎角控制,实现迎角限制。这种迎角限制器优点是通过“取大值”软限制方式实现迎角/过载限制,相比附加迎角反馈方式,控制律调参变量少、实现更容易。缺点同样是使系统稳定储备降低。
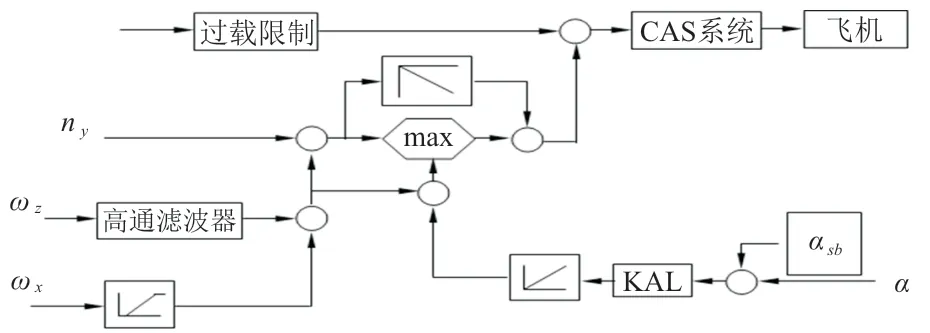
图15 “取最大值”逻辑限制方式控制律原理[56]Fig.15"Maximum value"logic limit method control law principle[56]
“四条线”迎角限制方式的设计原理如下:通过限制值以及操纵灵敏度要求确定驾驶杆任意位置对应的迎角/过载响应上下边界,并与飞行员指令进行比较,取中间值作为指令对飞机进行控制。该限制方式有效实现了适当的操纵灵敏度特性和正负迎角/过载限制功能,同时对系统的稳定储备无影响。
4.2 自动改尾旋控制
虽然飞机迎角限制能有效防止飞机突破失速迎角,但在极端情况下迎角限制可能会失效,例如控制律不能阻止飞机因持续大仰角爬升导致的失速,例如“尾冲”。这种情况下迎角会保持在一定的范围内直到速度降到气动舵面可有效发挥控制作用的速度以下,飞机会发生偏离、尾旋,因此要考虑尾旋自动改出。
一种自动改尾旋子系统如图16所示,整个系统由两个子系统组成,分别称为主系统和次系统。主系统的任务是识别初始尾旋的方向和姿态,根据迎角和偏航角速度大小,当超过门限值时,系统启动,随后发出改出操纵指令。其操纵动作包括顺尾旋方向最大偏转副翼、逆尾旋方向最大偏转方向舵。这些操纵动作一直保持到飞机的偏航角速度变号,随后对飞机的操纵转给次系统。
次系统的作用在于保证对飞机的控制,防止飞机进入另一方向的尾旋,直到驾驶员恢复对飞机的控制。次系统操纵动作是杆舵回中,使方向舵、副翼回零,同时升降舵偏转到预定的配平位置以使飞机抬头,随后三个舵面位置固定或启动常规的三个方向角速度阻尼器。
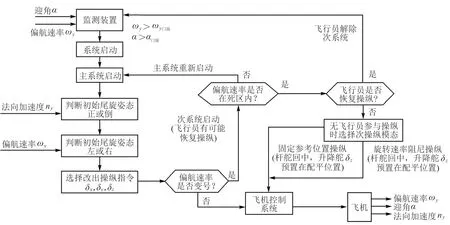
图16 自动改尾旋系统示意图Fig.16 Schematic diagram of an auto spin recovery system
在设计控制律时,首先要对控制律接通的判别条件做出限定,可根据飞机运动关键参数长时间滞留在尾旋区来判定。R.A.Bunge等介绍了一种的根据大气、惯导数据判定进入失速、尾旋的方法,F-18飞机选取如下条件判定进入尾旋:(1)空速低于222.24±27.78 km/h;(2)偏航速率15~20(°)/s持 续 约15 s,或50~60(°)/s持 续 约2 s。
特别应注意一些缺乏下俯能力的飞机在改出尾旋后可能出现“深失速”或“落叶飘”现象,改出这种运动可能需要采用纵杆振荡激励的方式。通过以往飞行器模拟飞行经验,此时如不能快速使飞机恢复小迎角或飞行员在纵杆操作时引入横航向激励,飞机极有可能再次进入尾旋。为此针对F-35战斗机专门开发了自动反深失速模态(Automatic Pitch Rocker)。航空工业沈阳飞机设计研究所给出了一种俯仰振荡激励控制器的设计方法;B.C.Chang等基于F-18飞机设计了介绍了一种自动从失速状态改出的控制器。
4.3 过失速机动控制
推力矢量技术的发展使得在过失速区域内精确的可控飞行成为可能。推力矢量涉及到复杂的飞/推综合控制技术,王海峰对此进行了全方位、细致的总结。
作为控制系统设计,最主要的问题是如何消除被控对象在过失速条件下无法精确建模对控制系统鲁棒性与有效性的影响。为了解决过失速机动存在的高非线性、强不确定性、强耦合等特性,F-35采用了动态逆控制律。针对建模误差的问题,除了通过飞行试验对模型进行细致的修正外,F-35使用增量式动态逆方法,成功地提高了控制算法的鲁棒性。
国内设计人员也对动态逆方法进行了优化改进。陈森等、刘俊杰等基于自抗扰方法直接给出了过失速机动控制律的设计方法,实时估计补偿建模不确定性,并基于动态逆结合自抗扰的状态观测器成功地进行了设计,并经过了缩比模型飞行验证。
5 大迎角飞行试验
5.1 缩比模型飞行试验
最早的缩比模型飞是为了研究飞机尾旋问题,由于缩比模型飞是最贴近全尺飞机飞行的模拟手段,因此是大迎角问题研究必须开展的一项工作。早期的缩比模型飞行试验均为无动力形式,由载机挂载到指定高度后抛下,由地面人员操控完成试验科目。随着无人机技术的发展,逐步向有动力自主飞行发展,配装推力矢量的缩比模型可进一步完成过失速机动技术验证。开展缩比模型飞工作主要考虑4个内容。
(1)相似关系
满足外形相似,质量、惯性矩相似,动力相似等准则。控制系统组成系统的动态环节的特征参数应满足相应的相似比例关系。
(2)总体布局
模型内部需要安装测试系统、遥控系统、回收系统、发动机系统、起落架系统,因此模型内部需要有足够的空间。在设计之初要考虑模型总体布局,包括各个设备的分布及各个功能舱位置、开口盖位置、内部安装空间、伞舱位置和开伞方式,保证模型各舱段内试验设备拆装方便,便于检查、调试和试验,并由此划分结构、结构框的位置及仪器的安装位置。
(3)测试系统
模型自由飞试验需要记录试飞参数,包括高度、空速、迎角、侧滑角、角速率、姿态角和过载等,准确采集和记录这些试飞参数是测试系统设计的一个关键环节。一般来说对于大迎角典型飞行参数测试系统要求如表1所示。
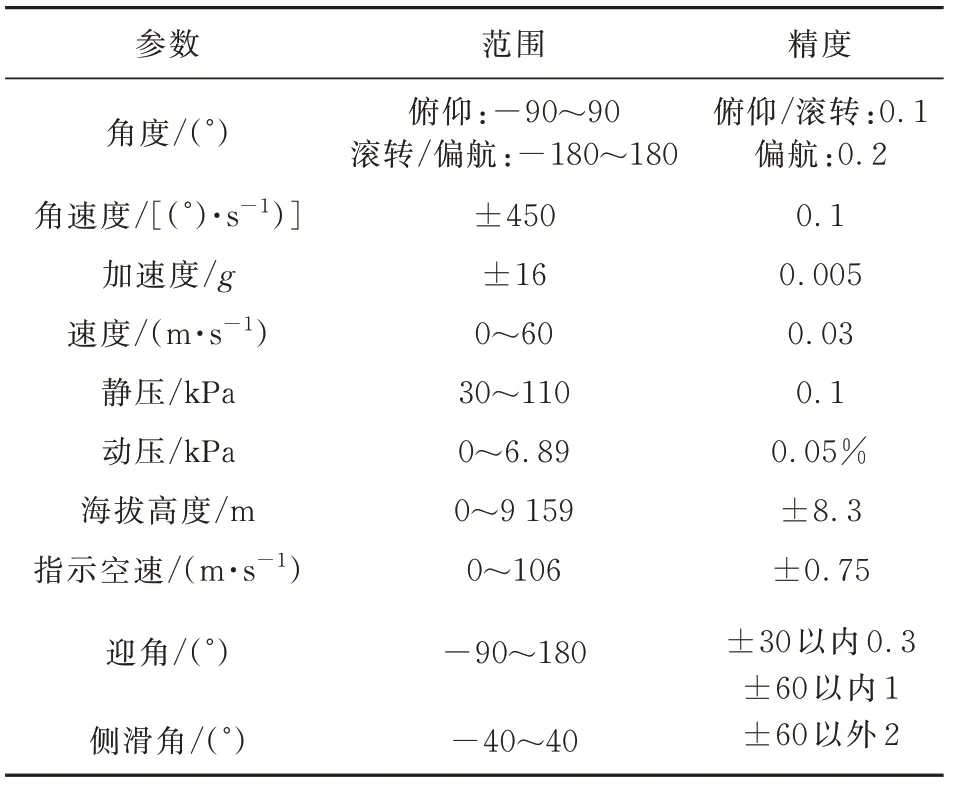
表1 飞行参数测试系统要求Table 1 Flight parameter test system requirements
(4)试验设计
在开展大迎角飞行前,要详细地制定试飞方案,制定不同舵面组合表,以获取飞机的全面失速特性、偏离敏感性、尾旋模态以及改出方法。基于缩比模型飞还应开展尾旋伞效能评估等试验。
5.2 全尺寸飞行试验
飞行试验必须参照试验规范进行,主要包括试验机的改装和飞行试验实施两方面。
试验机改装要考虑换装大迎角测试设备,增加应急动力、进气道畸变实时监控测量设备以及反尾旋伞等。为考察飞机倒飞尾旋零负过载飞行能力、发动机空中起动能力,必要时也要进行相应改装。在试验开始前制定发动机停车迫降返场剖面,并在模拟器上对试飞员进行反复训练。特别注意快速尾旋时纵向过载对机体结构的影响,必要时进行补强或限制。
反尾旋伞初步选型可参考文献[63],但必须经过风洞试验或缩比模型飞验证其效能。
相 关 文 献 分 别 介 绍 了F-14、F-15、鹰狮等飞机尾旋试飞情况。J.W.Hamstra详细介绍了F-35飞机在系统开发和演示阶段大迎角飞行控制系统开发和测试,重点介绍了其非线性动态逆控制律的开发、技术挑战和关键的飞行测试结果;王启等介绍了J-7L飞机失速、尾旋试验情况,歼-10飞机完成了过失速机动的飞行试验并在珠海航展上完成了相关演示。
6 大迎角问题研究展望
6.1 概述
20世纪末是大迎角研究的黄金时代,美、俄等航空发达国家通过近20年的努力,基本已解决军用飞机大迎角设计问题。我国在大迎角理论研究、工程实践、装备实战化等方面也取得了丰厚的成果。
未来使用新手段、新方法提高气动力精度,实现动力学精准建模,提高控制系统的鲁棒性以及控制精度,仍然将是大迎角研究不变的主题;而未来高隐身、高机动新布局飞行器将会是大迎角研究的热点。
6.2 高逼真度气动力模型构建体系
如何建立一套尽可能逼近真实情况的气动力模型未来仍将会是战斗机大迎角设计面临的首要挑战,这对于减少控制系统设计负担,避免过约束设计,充分释放平台性能都是密切相关的。
随着增压风洞、全尺寸风洞、风洞虚拟飞等试验技术手段的发展,可进一步减小支撑干扰、对模型精度的影响。高精度动态、旋转流场计算能力的进一步提升,将使得CFD与风洞试验形成优势互补,极大缩短项目研制周期。基于风洞试验、CFD计算、飞行试验等多种手段综合的气动力模型相关性分析,将形成对大迎角气动力建模误差带的准确描述。结合目前新兴的神经网络、机器学习等人工智能技术,可进一步构建高精度非定常气动力模型。
6.3 高不确定性系统的鲁棒控制
未来防失速、抗尾旋仍然是大迎角控制永恒的工作,在本体建模存在误差情况下以较高的鲁棒性在飞行边界处实现指令级别控制,抑制不可控或从不可控状态立即恢复,实现无忧虑操纵将是未来大迎角控制主要研究的方向。
另外,随着机载设备计算能力的提高,先进角加速度测量传感器的出现,使得对于被控对象的实时在线建模与补偿成为可能,一些先进的非线性控制算法、模糊控制、自适应控制等具备了较高的应用前景,特别适合大迎角被控对象不确定的情况,值得未来进一步探索。
6.4 大迎角主动流动控制与新质舵面使用
为了改善飞机大迎角流动特性,解决传统舵面大迎角下操纵效能不足的问题,研究人员提出了机头吹气、翼尖射流等基于主流流动控制的解决方案。未来推力矢量控制的研究重点是解决新一代飞机扁平化无尾布局的横航向控制问题。主动流动控制技术也将和机翼、机身变结构等技术形成新质大迎角控制舵面,随之而来的舵面分配优化问题应予以重点关注。
7 结束语
本文针对战斗机大迎角设计流程关键环节展开了综述,对大迎角气动特性、风洞试验、动力学分析、控制律设计与飞行试验等方面总结了现有研究成果,并对大迎角研究的主要热点方向进行了展望。
目前大迎角设计对于常规构型飞机来说,应主要考虑设计良好的气动外形,通过控制系统抑制飞机失速后的偏离、尾旋,保证飞机可以在失速边界甚至突破失速边界“无忧虑”地飞行,依托推力矢量进行精准、敏捷的操控。未来对于高隐身无尾布局等新概念飞行器,需采用新质舵面结合主动流动控制弥补飞机本体失速迎角低,航向静不稳定等缺陷。结合正在飞速发展的神经网络、机器学习等人工智能技术,进一步解决气动力建模精度与鲁棒控制等问题。
猜你喜欢
汽车工程学报(2022年3期)2022-06-10
环球飞行(2020年11期)2020-01-11
数学大王·中高年级(2018年11期)2018-12-17
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
世界汽车(2017年8期)2017-08-12
汽车工程学报(2016年5期)2017-01-16
湖南大学学报·自然科学版(2015年1期)2015-04-20
时代英语·高三(2014年5期)2014-08-26
航空知识(1959年1期)1959-01-19
