高精度定位技术在智能公交上的应用实践
2022-06-23 01:41:46何东马晓辉刘国印
智能建筑与智慧城市 2022年6期
何东,马晓辉,刘国印
(深圳市信诺兴技术有限公司)
1 高精度定位对智能公交的作用
智能公交是智慧城市的重要组成部分,车辆无线定位是实现智能公交的基础性支撑技术之一,智能公交的许多应用都离不开定位系统。我们将GPS定位导航系统、电子地图、无线通信及计算机车辆信息系统相结合就可以实现车辆跟踪、线路规划和导航、信息查询、紧急救援、事故处理、服务投诉处理、驾驶员和车辆监控管理等一系列功能。我们结合南方某市公交企业的高精度车辆定位项目建设的实践,具体介绍在公交企业中实现高精度定位的一些经验做法。
该企业一向高度重视安全管控工作,以往主要采取人防与技防相结合的方式,囿于技术水平,技防一直相对薄弱。在交通安全方面,该企业线网在该市地面交叉织成,物理方面导致安全管理较为分散,传统定点撒网稽查方式,不能灵活定位,无法实现精准稽查;在综治安全方面,场站布局和场内安全隐患点分散,传统检车轮式巡查和监控方法,难以区分风险等级,达不到重点监管要求。在技术层面上,现有的定位技术无法完全达到实时性、稳定性和抗干扰性等要求,影响安全管控的精准度,为提高管控效率,改变“广撒网”的落后方式,采用高精度定位技术进行系统改造升级已经势在必行。
2 高精定位系统建设思路
2.1 指导思想
高精定位系统改造升级应遵循如下原则:①实用性;②系统性;③稳定性;④先进性;⑤准确性;⑥完整性;⑦经济性;⑧易维护性;⑨可扩展和可维护性。
2.2 技术方案选择
项目建设分为高精度定位设备选型、安装和与现有公交平台系统对接两个阶段,其中高精度定位设备选型是关键。高精度定位设备采用组合导航技术,结合了卫星定位(GPS)和惯导系统等多种导航技术。现行的任何一种导航技术,都存在不足之处,比如广泛使用的卫星导航技术,虽然具有精度高,可以全球(地球上任何一处),全天候工作(不受天气影响,全天24h),覆盖区域广,可以实时输出导航数据(测试点的三维坐标和轨迹线、航偏角、航偏距、精确时间信息)等优势,但也存在在高架桥下、城市峡谷、隧道等复杂地形条件下信号可用性差,容易受到恶意或者无意干扰等弱点。所以,在有高精度定位需求的场合普遍采用了组合导航技术,即将多种不同的导航手段组合在一起,各种解决方法性能互补,取长补短,以获得比单一导航系统更高精度的导航性能。现今组合导航是一门涉及多学科的综合技术,包括遥感、GPS、地理信息系统、复合传感器,导航算法、人工智能、微电机系统等。其中,主要的组合导航技术系统主要有五种[2]。
1)惯性/天文组合导航系统
它是由惯性敏感器或者惯性导航系统和天文观测合成的导航系统。
2)惯性/多普勒导航系统
它是由惯性敏感器和多普勒导航雷达组成的导航系统。
3)惯性/GPS组合导航系统
它是由惯性导航系统和GPS组合而成的导航系统。
4)惯性/GPS/地形匹配组合导航系统
它是由惯性导航系统、全球定位系统和特定地形匹配系统组合而成的导航系统。
5)惯性/GPS/地形匹配/景象匹配组合导航系统
它是由惯性导航系统、特定地形地貌特征参考和目标景象参数组合在一起,分段实施组合的导航系统。
上述方案在技术、实施和成本等方面各有优点和不足,考虑到公交经营的具体情况,智能公交普遍采用的都是惯性/GPS组合导航系统技术方案。GPS采用卫星导航系统实现定位,其原理并不复杂,简单说就是车辆上的接收机用自己发出的代码与3颗卫星发出来的代码进行比对,测定他们在时间上有多大的不同步,用300000km/s的信号传播速度乘以该信号从卫星到接收机所用的时间,就可以得出接收机和各颗卫星之间的距离,以距离为半径,围绕每一颗卫星为圆心画一个想象的圆,三个圆相交处就是接收机所在的精确位置(经度和纬度)。
3 系统组成
基于上述方案,该企业设计的高精度定位改造方案的系统组成包括GNSS(Global Navigation Satellite Systm)接收系统、RTK+惯导解算系统、5G网络传输系统、CORS(连续运行参考站)。其中,GNSS系统负责接收卫星定位信息,RTK+惯导解算系统负责定位数据的解算,输出修正后的参数,CORS站系统负责GNSS数据接收、数据后处理、播发、用户端管理。5G网络传输系统负责定位数据上报、平台与终端间信令指令交互、升级配置参数等其他业务功能的通信。系统原理框架图见图1。
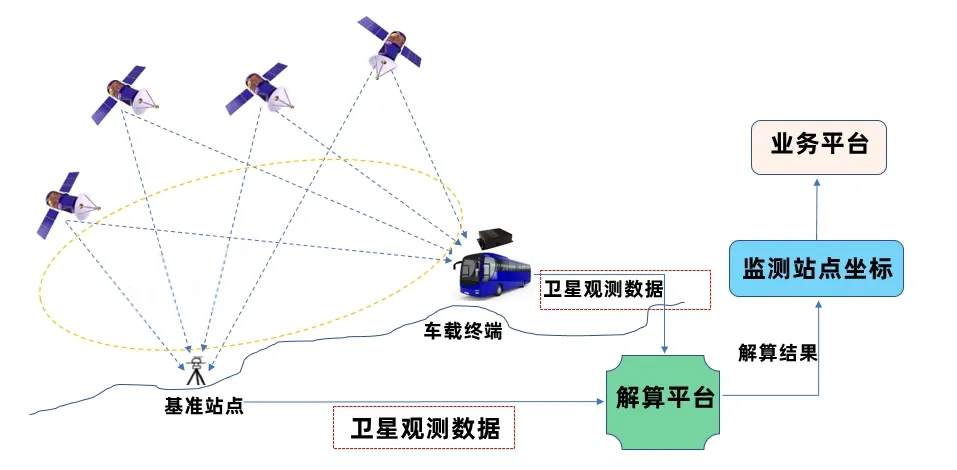
图1 系统原理图
4 关键设备选型描述
4.1 GNSS接收机
该精度定位设备终端应是一款高精度GNSS接收机,集惯性传感器、GNSS高精度导航修正算法于一体,能提供双天线航向,具有RTK载波相位差分技术和ZUPT(Zero Velocity Update,零速修正)功能,可以支持北斗三号系统,配置标准的OBD接口和RS-232接口,可以与车辆控制系统CAN总线通信获取车速等信息,并通过5G模块将数据传输到后台,该设备终端可独立运行,亦可以配合现有的车载终端运行,并无缝对接到后端处理平台。
该高精度定位终端原理架构图见图2。

图2 高精度定位终端原理架构图
该GNSS接收系统内置了支持北斗三号体制的多系统多频、射频基带一体化定位芯片,该芯片基于多频点融合运算,可以有效消除电离层误差并提高多径能力,在接入地基增强系统的情况下,实现如下性能指标:①整体定位精度平均达到亚米级;②在空旷环境平均精度在0.8m以内;③在高架、城市峡谷、辅路平均在1.5m以内;④在隧道内,误差/定位距离≤2%;⑤公交车后台可以通过接收到的定位数据判定主辅道、红绿灯路口距离。具体性能指标见表1。

表1 GNSS接收系统设备性能指标
4.2 RTK解算技术
方案采用了RTK(Real-time Kinematic,实时动态)载波相位差分技术,RTK是通过实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。这是一种崭新的卫星定位测量方法,以前的静态、快速静态、动态测量都需要事后进行解算才能获得厘米级的精度,而RTK能够在空旷环境实时达到厘米级定位精度,RTD(Real Time Differential)也属于差分GPS,但RTD计算的是伪距,根据基准站已知坐标和各卫星的坐标,求出每颗卫星任一时刻到基准站的真实距离,再与测得的伪距及逆行比较,得出伪距修正值,将其传输到用户接收机,属于码(C/A码、P码)差分技术。RTK计算的是两个测量站载波相位观测值,即是将基准站采集的载波相位发给用户的接收机,进行求差解算坐标,属于载波(L1、L2、L5)相位差分技术。显然RTK比RTD的精度更高,RTD的精度只有亚米级,而RTK在野外实时可得到厘米级定位精度,但RTD的价格远低于RTK[1]。
本方案中的惯性导航技术是自主式的惯性系统,它依靠系统内按正交坐标系配置的陀螺仪和加速度计,敏感运载体的运动信息,通过积分运算确定载体的位置、航向和姿态,以此作为控制参数实现系统功能。随着微机电(MEMS)技术的发展,加速度计和陀螺仪等其他ⅠMU(惯性测量单元)都整合在芯片上。
4.3 CORS站系统
CORS站系统的基准站网子系统是连续运行卫星定位服务系统的主要组成部分,高精度地基增强位置服务网通过在市域内均匀布设连续运行基准站,不间断地接收GNSS卫星信号,产生高质量、连续的GNSS相位、伪距和广播星历等数据作为系统的数据源。各基准站主要由GNSS接收机、网络通信设备、电源系统、监控系统和蓄电池等部件构成。控制中心24h不间断接收到各基准站的数据,进行整体建模解算,形成多基准站差分定位用户数据,生成一定格式的数据文件,通过播发系统,如移动网络、UHF、Ⅰnternet等,将码相位/载波相位差分修正信息分发给用户,用户得以实时解算出其所在位置的精确定位。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21 00:40:16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:06
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
中学生数理化·八年级物理人教版(2017年3期)2017-11-09 03:05:23
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
光学精密工程(2016年3期)2016-11-07 09:03:34
小学科学(学生版)(2016年1期)2016-10-09 01:53:02