一种深立井井筒数据采集及分析系统设计
2022-06-22 02:14:28赵佰亭庞猛贾晓芬
工矿自动化 2022年5期
赵佰亭, 庞猛, 贾晓芬
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引言
我国煤矿的开采深度多分布在600~800 m,但约有2.95万亿t煤炭资源埋深大于1 000 m,占煤炭资源总量的53%,因此,煤炭开采向深立井方向转变是不可避免的趋势[1-2]。深立井属于矿山的咽喉要道,不仅用于提升开采到的煤炭和设备等,还用于提升下井作业工人,因此深立井的可靠性尤为重要,需要对深立井井筒内的各种状况进行检测[3-5],以避免重大安全事故,如井筒内的有毒气体浓度过高导致下井工作人员中毒、井筒壁破裂导致矿井坍塌等[6-7]。
深立井内部环境复杂,能见度低,仅靠人工监测井筒内情况不仅耗时,还可能存在漏看、错看等问题。当前深立井井筒数据采集大多采用在井筒内固定位置安装传感器的方式,该方式需要安装较多传感器且传输的数据量大,不仅对井筒内WiFi网络带宽要求高,还存在不易维护等问题[8-9]。有研究人员已着手研发罐道巡检机器人[10-11],但当前研发的机器人能够搭载的传感器数量较少,且没有安全保护装置,一旦有突发情况造成机器人断电,机器人很容易失速并滑落脱轨,造成安全隐患。目前的深立井井筒数据可视化方案大多采用3D GIS进行渲染和显示,该方式不易移植、开发周期长且价格较高,仅有少数厂家使用[12-14]。针对上述问题,设计了一种深立井井筒数据采集及分析系统。该系统通过罐道巡检机器人采集井筒数据,并对罐道巡检机器人进行改进,通过增加车轮锁模块保证机器人运行过程中的安全性;采用云服务器加前端可视化面板的方式进行数据处理和显示,在云服务器端采用卷积神经网络(Convolutional Neural Network,CNN)算法对井壁及罐道进行裂缝检测,对前端可视化面板进行轻量化处理,以提高系统的便携性和可移植性。
1 系统架构
深立井井筒数据采集及分析系统包括数据采集、数据处理和分析、上位机显示3个模块,如图1所示。

图1 深立井井筒数据采集及分析系统框架Fig.1 Framework of data acquisition and analysis system for deep vertical shaft
数据采集模块采用搭载摄像头及各种传感器的罐道巡检机器人采集深立井井筒内部的各种数据。罐道巡检机器人电路以STM32F103作为主控芯片,采用3个红外摄像头组合实现360°视频数据采集,基于光电编码器数据计算机器人运行速度和距离,从而确定安全隐患位置,并通过WiFi模块传输至云服务器进行数据处理,以减少机器人算力和电量损耗。机器人头部搭载超声波测距模块,以测量其与立井底部的距离,当距离小于3 m时,启动反向运行程序,循环检测井筒内的各项数据。
数据处理和分析模块通过云服务器接收罐道巡检机器人发送的各类数据,并对数据进行分类处理:温湿度传感器和气体传感器数据直接存储在相应文件夹内;视频数据采用CNN进行处理,分析罐道和井壁是否出现裂缝、形变等,再将分析结果存储在相应文件夹内。
上位机显示模块采用异步JavaScript和XML(Asynchronous JavaScript and XML,Ajax)从云服务器定时读取数据,并采用JavaScript编写上位机界面显示程序。
2 罐道巡检机器人结构改进
由于井内罐道采用刚性材料制成,所以采用磁吸附方式使罐道巡检机器人吸附在罐道表面,且磁铁不直接与罐道表面接触,布置于距离罐道表面5 mm处,以保证足够强的磁吸附力。
为了保证罐道巡检机器人在井筒内顺利、安全地采集数据,需要给罐道巡检机器人安装车轮锁装置。该装置在发生以下情况时工作:① 机器人在井筒内遇到不可控情况造成断电时,自动启动车轮锁,将机器人固定在罐道上,防止失速并滑落脱轨,杜绝因突然断电造成的安全事故。② 当需要在井筒内某处长时间停留检测时,可通过程序控制双通道与门开关,启动车轮锁,让机器人停留在罐道上,实现长时间检测。
车轮锁三维结构如图2所示。双通道与门开关接收来自主控板和稳压器的信号,当接收的任意一个信号为低电平时,断开继电器的电源,使带卡扣的衔铁卡住齿轮,将齿轮和轮子固定在一起,从而限制机器人继续移动。
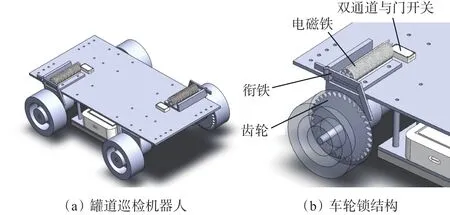
图2 罐道巡检机器人车轮锁Fig.2 Wheel lock of cage guide inspection robot
3 数据分析及显示
3.1 环境监测数据分析
光电编码器采集罐道巡检机器人的运行速度,然后通过积分的方式计算出机器人所在位置,将位置和温湿度、可燃气体浓度、有毒气体浓度等数据一一对应,以数组的形式进行存储,以方便数据提取操作。罐道巡检机器人的运行速度v0和路程S分别为


式中:C0为机器人轮子的周长;M为统计时间内编码器的总脉冲数;M0为车轮旋转1周光电编码器的脉冲数;t为统计时间;T为从机器人出发到计算路程时刻的总时间。
3.2 视频数据分析
视频数据处理流程如图3所示。对于摄像头采集的罐道及井壁视频,将数据传输至上位机后,利用OpenCV按帧提取视频中的图像。因为相邻帧的图像相似性较高,所以每隔2帧提取1帧图像。在红外图像增强部分,先对图像进行多尺度卷积,对卷积结果分别进行双通道自适应均衡化和自适应受限拉普拉斯变换,然后将两部分结果融合[15]。对多尺度卷积结合双通道自适应均衡化的图像增强方法进行改进,将图像输入方式改为接收视频帧提取操作的输出,实时对视频流中的红外图像进行增强。采用基于 U−net和特征金字塔网络(Feature Pyramid Network,FPN)架构的网络对增强图像进行裂缝检测[16]。如果检测到裂缝和形变,则提取该帧图像并将其命名为拍摄视频时罐道巡检机器人所在的深度,然后将该帧图像存储在相应的文件夹内。
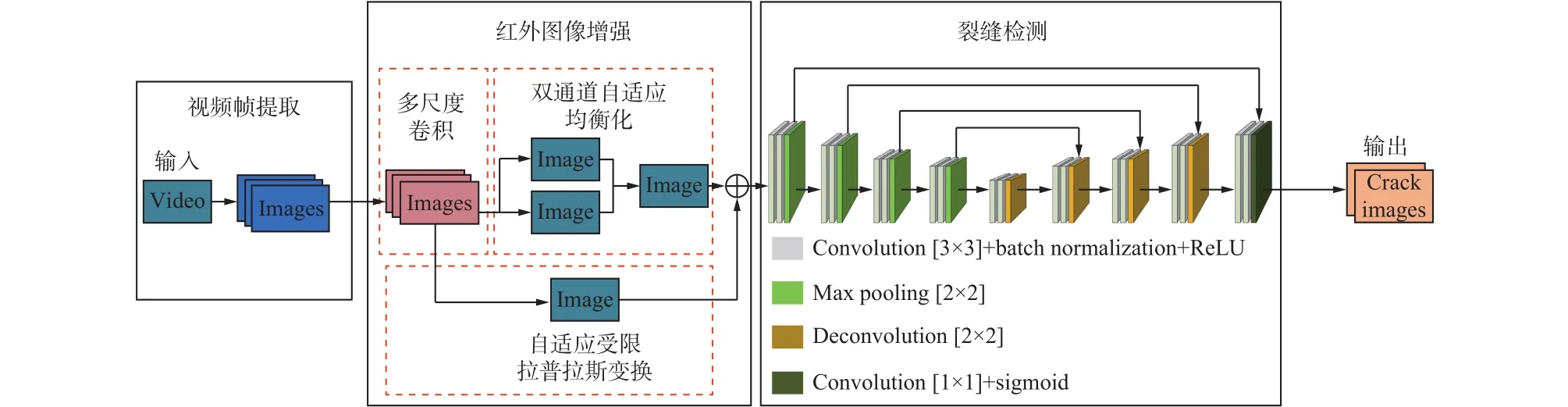
图3 视频数据处理流程Fig.3 Processing flow of video data
3.3 数据显示
可视化界面使用JavaScript编写,采用Visual Studio Code编辑,并使用Echarts实现数据的可视化,同时加入互动操作。深立井内部情况可视化面板如图4所示。面板左右两侧分别显示井筒近7 d罐笼升降次数、出煤量、下井工作人数、罐道巡检机器人所在位置的CO浓度和温湿度、罐道和井壁的健康程度。面板中间上部显示矿山的预估开采煤量和目前已开采煤量,下部显示最近7 a每个矿井的出煤量。当系统启动后,会读取相应文件夹内的数据,然后刷新可视化面板上的显示数据(每2 s刷新1次)。由于全屏刷新响应速度较慢且影响观看,所以采用Ajax传输方式实现数据的局部刷新,在浏览器与 Web 服务器之间进行异步数据传输。JavaScript可在不重载页面的情况下与 Web 服务器交换数据,实现局部数据刷新。
4 测试分析
为验证车轮锁的可靠性,编写模拟罐道巡检机器人断电的程序,并将程序整合至机器人控制程序中。让罐道巡检机器人在室外竖直的刚性面板表面运行,启动断电程序后,车轮锁立即启动,罐道巡检机器人平稳地停在刚性物体表面,不会滑落或侧翻,如图5所示。
打开上位机的可视化显示页面,通过Ajax读取云服务器的数据。若读取到温湿度、CO浓度等数据,则通过局部刷新的方式显示;若读取到裂缝图片数据,则立即刷新界面,将裂缝图像显示在可视化面板中间位置,并发出警告信号。例如,在一号深井200 m处识别到裂缝,会以红色字体显示警告“请注意!!!一号深井200 m处检测到裂缝”,提示工作人员及时采取相应的解决措施。双击红色字体,会解除警告,恢复到正常的可视化面板。裂缝检测结果如图6所示。可视化面板加云服务器的数据读取和显示方式将上位机软件所占内存缩小至5 MB以内,页面刷新快,且对显示器的要求较低。
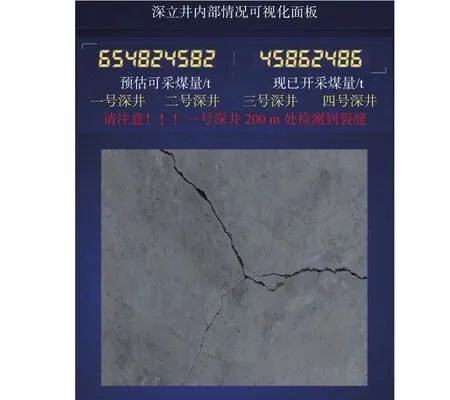
图6 裂缝检测结果Fig.6 Crack detection result
5 结语
设计了一种深立井井筒数据采集及分析系统,采用带有车轮锁的罐道巡检机器人实现数据采集,既能保证机器人在井筒内运行的安全性和可靠性,又能高效、方便地检测井筒内各种环境数据。将机器人采集到的数据通过WiFi模块传输至云服务器中,在服务器中对视频数据进行图像增强和目标检测,识别井筒井壁和罐道裂缝,增加了深立井井筒内的安全性。采用前端可视化面板加云服务器的方式将系统轻量化,提高了系统的便携性和可移植性。
猜你喜欢
商品与质量(2021年43期)2022-01-18 05:28:48
煤(2020年8期)2020-08-11 07:12:46
山西煤炭(2019年1期)2019-05-23 09:00:04
设备管理与维修(2017年2期)2017-04-13 02:50:52
黑龙江科学(2016年1期)2016-03-15 08:22:30
江西煤炭科技(2015年2期)2015-11-07 03:10:08
江西煤炭科技(2015年2期)2015-11-07 03:10:07
人间(2015年21期)2015-03-11 15:24:48
河南科技(2014年11期)2014-02-27 14:17:01
河南科技(2014年18期)2014-02-27 14:14:46