
一种脑卒中手部康复设备研究
2022-06-21 11:28:02成尔卓史建新廖浩添
物联网技术 2022年6期
王 铮,成尔卓,史建新,杨 博,廖浩添
(南开大学滨海学院,天津 300270)
0 引 言
据最新发布的《中国脑卒中防治报告(2019)》显示,我国总体脑卒中终生发病风险近40%,发病率全球第一。尽管医疗保健技术在不断进步,但中风的发病率预计在未来仍将上升。
超过一半的中风幸存者经历了某种程度的偏瘫,这些患者不能独立进行日常活动,因此必须依靠人的帮助进行基本活动,如饮食、活动等。人类的手复杂且灵活,研究表明,上肢远端(即手部)功能与日常生活执行能力的关系强于其他肢体。手功能的缺失将严重影响患者的生活质量,手部康复已成为脑卒中康复过程中非常重要的一环。
目前针对中风引起的手部功能性障碍的复健设备,多采用外骨骼包裹手指通过电机带动外骨骼运动从而实现手指从动的方法。因人手关节具有较多自由度和多样化的运动形式,手部外骨骼康复设备设计复杂,难以达到手部康复的效果;且因其刚性和包裹的特点,操作不当还易造成手部损伤;安装及调整难度较大,全套设备成本较高。因此,本文采用集成性更高,价格更为便宜的Arduino Nano开发板和HX711称重传感器模块,采用非包裹的手指固定件进行复健,为患者手部保留最大自由活动限度,并保障舒适度。同时,将运动单元和数据采集单元相结合,在保障患者手部安全的前提下,使手部康复设备整体结构更为简洁,使成本更低。
1 脑卒中患者手部康复设备总体设计
系统结构如图1所示,分为运动单元与数据采集单元。设备由6组12个SG90伺服器、6个手指托盘、6组HX711ADC采集模块、1组可调变压模块,1个BT-05蓝牙模块和2组Arduino Nano微控制器组成。
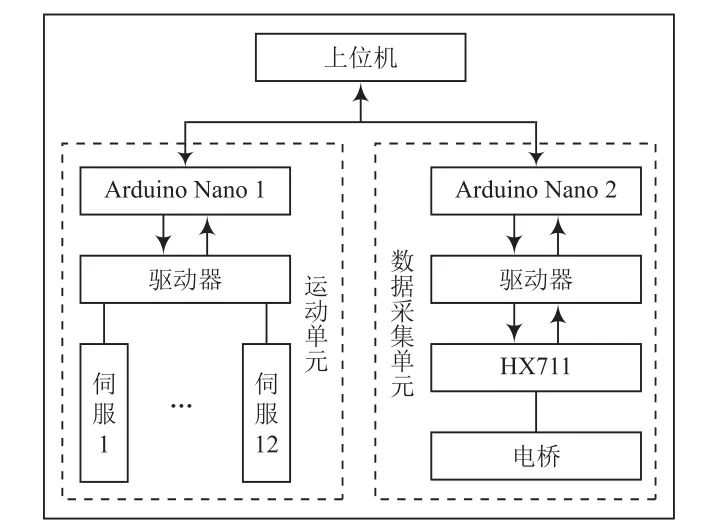
图1 整体结构框架
2个单元各由一组Arduino Nano单片机作为处理器,并与上位机相连。运动单元包括6个手指运动组件,其中4个手指运动采集组件分别对应左手或右手除拇指外的4根手指,另外2个手指运动采集组件分别对应左手或右手的拇指。6组手指运动组件前端与托盘连接。伺服器转动带动托盘,实现对患者手指的辅助运动。每组伺服器均可提供1.6 kg/cm扭矩,并与手指托盘均通过2个树脂材质3D打印连杆连接,实现手指在120°范围内的自由旋转。
数据采集单元包含6组HX711ADC采集模块。启动采集功能,伺服运动将停止,患者手部对ADC采集器施加作用力,该单元中的Arduino Nano芯片实时获取力采集模块采集的压力变化,并在PC端(上位机)给出数据反馈。
2 机械结构设计
2.1 Rehab Helper伺服运动原理
Rehab Helper采用5杆连杆进行二维运动。如图2所示,两个伺服电机(4,5)旋转2个延展臂(7,6),延展臂通过螺丝和螺母与延展臂(9、8)连接。延展臂的其他端部也由螺丝和螺母连接。在测试系统中,指针被固定在延展臂(9、8)连结处。延展臂(7、6)转动,延展臂(9、8)实现从动。指针可以到达半径为(延展臂7+延展臂9)与(延展臂6+延展臂8)的两个半圆之间的任意点,中心位于2个伺服电机所组成系统的中部。
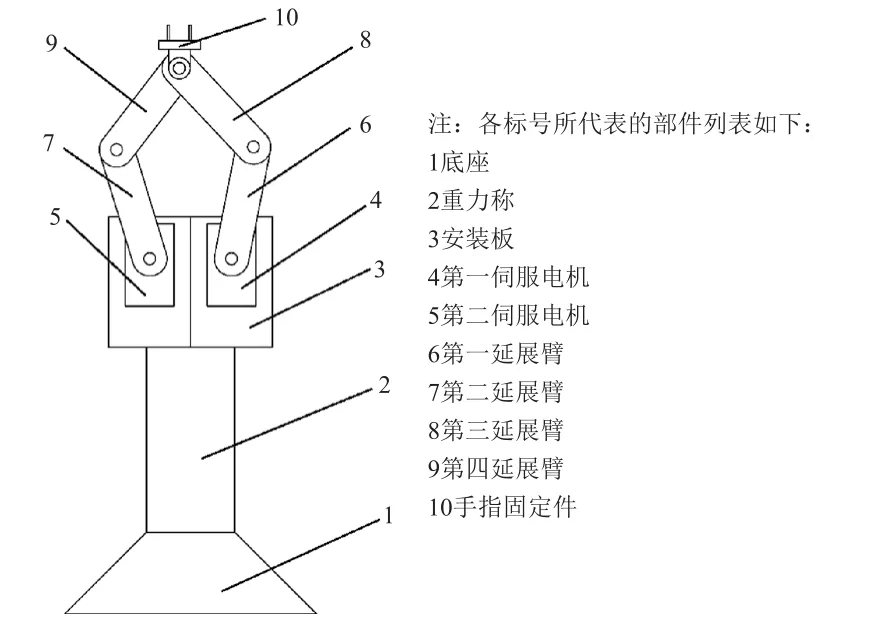
图2 单个手指运动采集组件结构示意图
2.2 单手指Rehab Helper组件结构
第一伺服电机和第二伺服电机均采用SG90微型伺服电机,伺服电机的控制接口与单片机Arduino Nano1的I/O接口连接。第一延展臂的一端与第一伺服电机的输出轴固定连接,第二延展臂的另一端与第二伺服电机的输出轴固定连接,从而使得第一延展臂在第一伺服电机输出轴的径向平面旋转,第二延展臂在第二伺服电机输出轴的径向平面旋转。第一延展臂的另一端与第三延展臂的一端铰接,第四延展臂的另一端与第二延展臂的一端铰接,第三延展臂的另一端与第四延展臂的一端铰接。第三延展臂和第四延展臂的铰接处连接手指固定件。伺服机通过安装板固定在重力称上部,做到运动单元与数据采集单元相结合,节省内部空间。
3 脑卒中患者手部康复设备硬件设计
3.1 运动单元
运动单元将Arduino Nano作为控制中心,该单片机是Arduino USB接口的微型版本,无电源插座以及USB,接口为Mini-B型插座。该单片机具有高性能、低功耗、体积小、成本低等优点。同时,Arduino Nano具有14路数字输入/输出口(其中6路可作为PWM输出),8路模拟输入,而且双排针引出可以直接插在面包板上,灵活通过杜邦端子与12个舵机相连,满足同时带动5根手指运动的要求,实现全手掌运动。运动单元电路如图3所示。
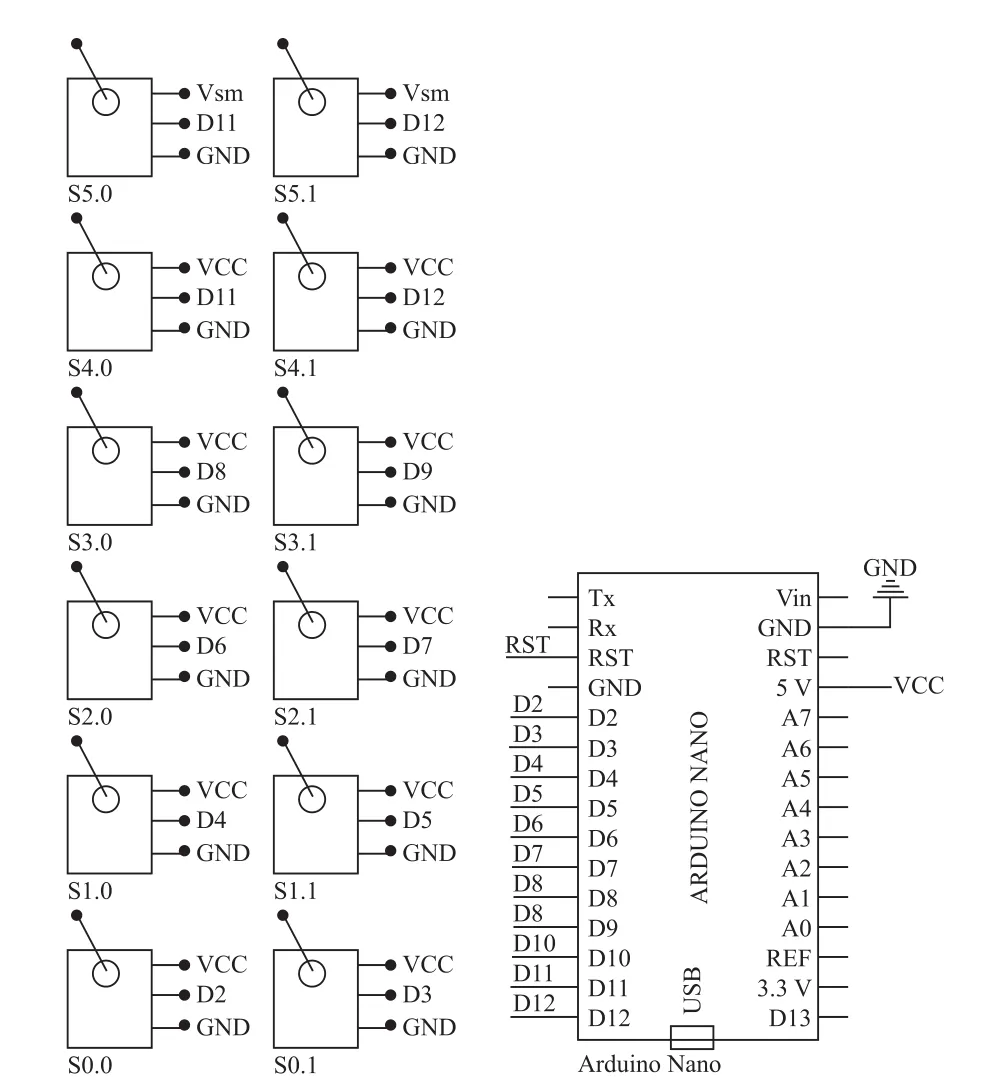
图3 运动单元电路
3.2 数据采集单元
该单元通过将重力传感器模块与Arduino Nano相连而成。开启数据采集功能,ADC采集模块将所收集的数据上传至单片机,经过分析得出最终数据。数据采集模块电路如图4所示。

图4 数据采集模块电路
3.3 重力传感器模块
该模块包含HX711芯片与应变式力传感器(电桥)。HX711是一款专为高精度电子秤而设计的24位A/D转换器芯片。该芯片集成了稳压电源、片内时钟振荡器等其他同类型芯片所需的外围电路,具有集成度高、响应速度快、抗干扰性强等优点。该芯片与后端MCU 芯片的接口和编程非常简单,所有控制信号由管脚驱动,无需对芯片内部的寄存器编程。借助HX711降低了手部康复设备整机成本,同时还提高了整机的性能和可靠性。电桥具有精度高、易加工、结构简单紧凑、 抗偏载能力强、固有频率高等优点,电桥中内置有应变片,当弹性元件受力产生形变时,应变片产生相应的应变, 转化成电阻变化。将应变片受力引起的电阻变化转换为测量电路的电压变化,通过测量输出电压的数值换算为所测物体的重量。桥式传感器电路如图5所示。
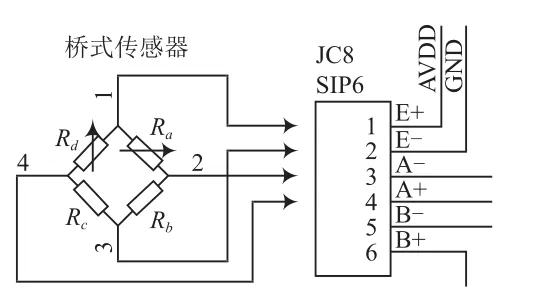
图5 桥式传感器
3.4 BT-05蓝牙模块
BT-05 4.0蓝牙模块采用CC2541芯片,配置有256 KB空间,遵循V4.0BLE蓝牙规范,支持AT指令,用户可根据需要对串口波特率、设备名称、配对密码等参数进行更改,支持UART串口通信。
4 脑卒中患者手部康复设备软件设计
系统上电后,各模块进行初始化。移动端或PC端可以连接设备,对设备进行控制,并观测数据等。给设备下达运动指令后,设备运行,对手指进行按摩;对设备下达测量指令,运动功能停止,手指对采集器施加作用力,获得手指的运动力数据。运动力由Tenzo桥测量,可以通过BT-05或串口方式,在移动端或PC端直观得出手指反应力数据。系统流程如图6所示。
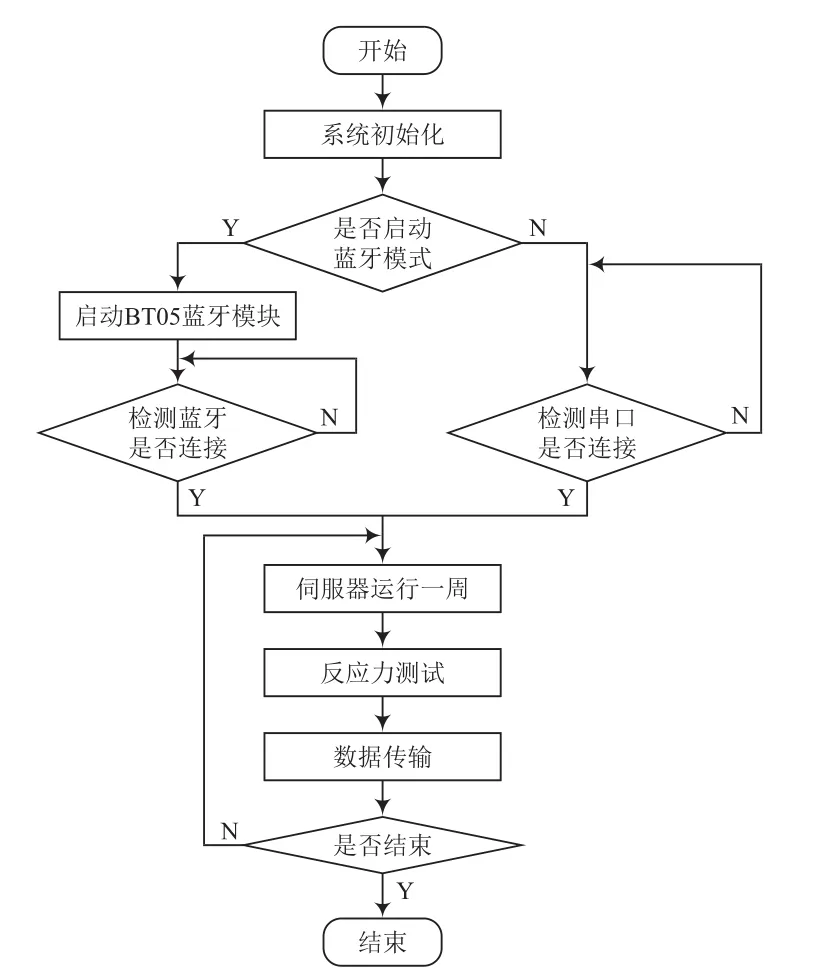
图6 系统流程
运动单元启动时,首先检查设备是否接收到数据,等待读取的数据字节数,若大于0,则表示接收到数据。读取设备接收数据中的某一数据,其最后一字节为产生伺服的角度,由于最后一字节产生伺服的角度范围为0~180°,为得到预定数值进行多次纠正。
运动单元运行代码如图7所示。
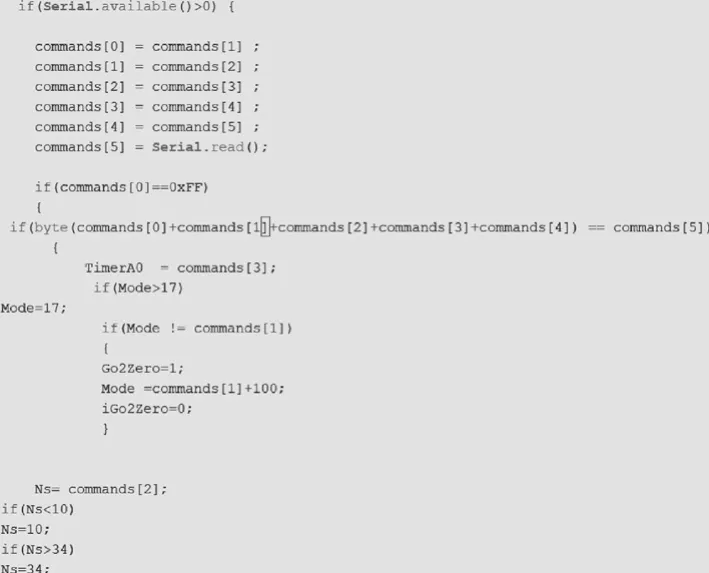
图7 运动单元运行代码
本设计具有17种模式可供用户选择。每种模式下包含2种设定好的子模式。以用户选择工作模式为例:食指、中指、无名指和小拇指按照如下运动轨迹进行:

运动8 s,8 s后食指、中指、无名指和小拇指按照如下运动轨迹运动8 s:

当数据采集单元工作时,我们以选择使用PC端显示数据为例,代码如图8所示。
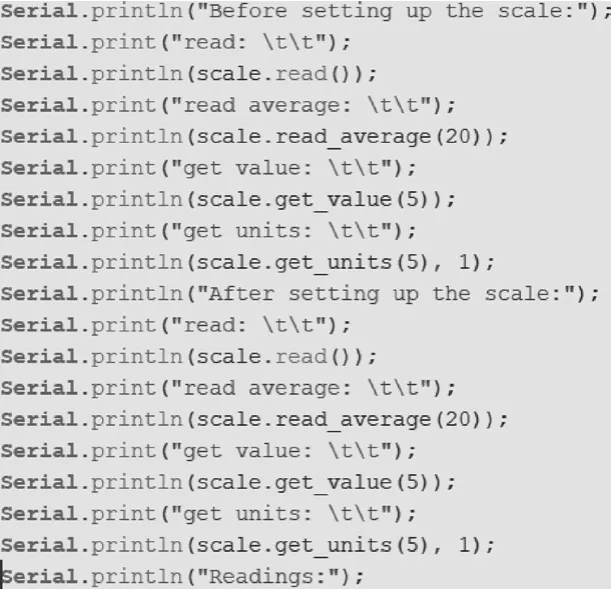
图8 数据采集单元运行代码
首先设置手在放松状态下的重量作为皮重,接着通过独立的ADC获取单一手指20个读数的平均值,最后汇总5个ADC所取的平均值将其依次相加取均值,并将得数与皮重相减,作为手部的力。
5 系统程序实测
通过移动端或PC端发送指令可以控制设备运行。根据需要选择合适的工作模式,本文选择5组伺服器对患者的右手进行康复训练。使用时,手指放置在手指固定件上后,控制模块中的其中一块Arduino Nano芯片接收上位机控制信号,驱动模块运动。患者使用设备图如图9所示。
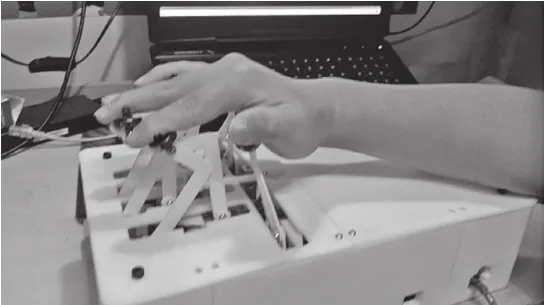
图9 患者使用设备图
控制模块中的其中一块Arduino Nano芯片,实时获取力采集模块采集的压力变化,在PC端(上位机)或移动端可以直观得到手指反应力数据。PC端数据回馈如图10所示。
图10 PC端数据回馈
6 结 语
设备的设计初衷在于帮助因脑卒中引起的手部功能性障碍的患者进行更加便捷且成本低廉的治疗。因此采用集成性更高,价格更为便宜的Arduino Nano开发板以及HX711称重传感器模块作为采集装置。我们创造性地使用HX711称重传感器模块的数据采集装置,将其顶部固定以带动手指运动,在大大减小设备体积的同时使得患者手部获得了宽松的空间,也为线路排布留下大量空间。在电机方面,采用SG90微型伺服,降低噪声。由于只需将指尖与运动装置相连即可实现通过带动指尖运动使手部整体运动的效果,所以使用者手部将拥有更大的空间,不会产生压迫感,同时也使得本装置更具有普适性。设备可大幅降低中风患者手部康复成本,同时也为其他相关康复设备研发提供新思路。
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31 09:48:18
实用手外科杂志(2022年2期)2022-08-31 09:48:02
小聪仔(婴儿版)(2020年12期)2021-01-26 00:54:42
微特电机(2020年11期)2020-12-30 19:42:32
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
工业设计(2016年6期)2016-04-17 06:42:53
实用手外科杂志(2015年4期)2015-08-27 01:54:14
少年科学(2015年8期)2015-08-13 22:13:01
中华皮肤科杂志(2014年4期)2014-12-19 12:56:00
