海上风电无人系统自主巡检应用构想
2022-06-20 11:24:02赵文璇周筑博
海洋技术学报 2022年2期
赵文璇,李 明,周筑博
(1.国家海洋技术中心,天津 300112;2.天津航天中为数据系统科技有限公司,天津 300301)
在国家碳中和目标的指引下,我国海上风电等清洁能源的发展应用将逐步爆发。据国家能源局发布的数据,截至2021 年11 月底,我国海上风电总装机容量达到1 480 万千瓦,已超越英国成为全球第一大海上风电市场。全球海上风电累计装机容量预测,2030 年将达到2 亿千瓦以上。因此,2022—2030 年将是我国海上风电市场高速发展的阶段,也是海上风电由近海进入远海的最佳时期。
与此同时,海上风电的运营与维保需求日趋强烈,尤其是未来中远海风电场的运维。对于海上风电而言,除了承受与陆地风电相同的湿热、紫外线老化等常见的环境影响外,盐雾等化学介质腐蚀也是影响其运维的主要问题。在海洋环境中对风电机组进行维护,运维人员往往需要在海平面以上数十米甚至百米高的空中进行作业,来完成对机舱、轮毂、叶片等部件的检查,还需潜入海底对风电桩基及海底电缆进行检查和维护。使用传统的人工检修方法,会使得风电机组停机时间长,发电量损失严重。此外,运维船只每次出海的使用费和人工费也会占海上风电场运营和维护成本的很大一部分。
为提高巡检的效率与安全性,基于人工智能的无人化海上风电巡检方式是大势所趋。自2016 年起,以无人机和无人船/艇为代表的无人系统,在水上风电机组叶片、水下风电桩基巡检等方面的应用逐年增加。如何实现无人系统的自主规划路径、数据自动建模与缺陷自动识别是当前的研究重点与难点。因海上作业窗口期短,由维修船携带无人机、无人船/艇出海作业受到一定限制。因此,本文提出一种基于无人机、无人船/艇等无人系统在海上风电场本地部署,可实现陆上指挥中心远程调度控制的海上风电无人值守智能化巡检的应用方法。
1 海上风电无人系统巡检应用现状
随着国家政策的持续支持,海上风电近年来得到迅猛发展。由于海上风电场分布广阔,风机的装配、部署日益增多,如何在短暂的海上窗口期内,完成大规模风电场的风机巡检是当前要重点解决的问题。采用传统的人工巡检方式会耗费大量人工成本和运行费用,而且在海上运维的安全性和稳定性得不到保障[1]。为了有效提升海上风电巡检的效率,减少人工和运行费用,目前国内外已经开始采用无人机、无人船/艇等无人系统开展巡检,以提高自动化程度,作为对人工巡检的一个重要的补充。海上风电巡检除了常规的叶片破损、风机状态外,还需关注水下部分生物附着、桩基状态、管线冲刷等。同时,还要关注海上风电场及周边是否存在采矿挖沙等违法用海活动。
1.1 国内现状
无人机主要对风电设备的海上部分进行巡检,凭借其对叶片高速、便捷、精准巡检等优势,已逐步成为我国风电领域巡检发展应用的新趋势。2019年7 月,龙源海上风力发电有限公司组织进行了海上无人机叶片巡检[2]。无人机携带可见光高清摄像机、红外传感器、激光测距仪等多种载荷,对风机叶片前缘、后缘是否有开裂、破损,叶片表面是否有雷击损、腐蚀、剥落、裂纹,排水孔是否堵塞等情况进行巡检。通过对拍摄的照片或视频进行后台处理,进而确定叶片缺陷的种类、位置、尺寸等信息。无人船/艇在海上风电巡检中的应用从2017 年开始探索,搭载高精度实时三维声呐、浅地层剖面仪等仪器,打破传统水下桩基、海底线缆排查靠人工探摸、巡检周期长、海底风险高的瓶颈。无人船/艇自动对风电机组周边区域进行探测,检测风电机组桩基冲刷情况、风电机组周边水下地形地貌、风电海底电缆冲刷与掩埋状况、海上升压站基础冲刷情况等,并根据调查结果评估桩基与线缆安全性和可靠性,为海上风场后续的检测作业和维护性施工提供依据,为海上风电日常运维提供可靠支撑。2019 年1 月,云洲智能M80“极行者”海洋探测无人艇搭载高精度实时三维声呐和浅地层剖面仪,在江苏黄海海域对中广核新能源风电场电缆裸露现状进行检测评估,圆满完成了38 台风电机组基础冲刷检测、海上升压站基础和海底电缆冲刷检测等作业内容[3]。2020 年,中国能源建设集团广东省电力设计研究院有限公司建立了海上风电场智能船舶调度系统[4]。该系统将无人船应用于海上风电场,可实时监测海域,精准预测气象,对海上风电场的生产安全管理和运维效率的提升,起到重要的作用。
在装备研制方面,无人机系统主要以深圳大疆等单位为主,无人船/艇以珠海云洲智能等单位为主;在数据处理与缺陷识别方面,扩博智能等单位是行业的领先者。近年来,多种新式装备已逐步开始在海上风电巡检中开展探索,自然资源部南海调查技术中心与中国科学院沈阳自动化研究所共建“水—空无人系统研发与应用实验室”,研制无人航空母艇(简称无人航母),将无人机与无人船/艇融合成一体化装备,结合了无人船/艇航程远和无人机搜索范围大的优点,重点面向海上搜救应用;并结合其技术特点,已初步开始在海上风电巡检中开展应用,可同时实现水上风电机组叶片和水下桩基线缆等巡检,提高巡检效率。随着目标识别等技术的发展,扩博智能等单位逐步开始采用“特种飞行机器人+机器视觉+数据”的解决方案,利用AI 图像识别技术对风机叶片进行巡检。人工智能的巡检方案由机器视觉自动初筛叶片受损状况,最终生成风机叶片损耗辅助报告,再由人工进行最终的受损情况确认。
当前采用的无人机、无人船/艇巡检解决方案,已经初步实现了自动化、智能化,但是仍然需要人员携带设备乘维修船到现场进行巡检,出海时间和巡检时间受海上窗口期限制,亟需采用基于海上风电场本地部署的无人值守智能化方式,降低海上风电巡检的费效比,提升巡检的安全性。2020 年,国核电力规划设计研究院有限公司研究了海上风电场升压站无人值守关键技术[5]。该无人值守系统采用自动巡检机器人,针对不同区域的地形特点及监控对象,制定不同的巡检路线与巡检方案。该无人值守系统保证了海上升压站设备的实时监测,提高了运行可靠性,提升了自动化水平。但其并未针对风电机组、风电基础及水下设施开展无人值守水空一体化监测。
1.2 国外现状
美国2018 年底首次使用无人机对海上风电机组进行巡检,Deepwater Wind 公司使用多旋翼无人机,从维修船上起飞,对美国首个海上风电场Block Island Wind Farm 进行无人机航测。该公司目前已经是全美领先的海上风电开发企业。
英国勘测公司HydroSurv 在英国创新基金资助下,2021 年开发了用于海上风电勘测的无人船,配备多种传感器和有效载荷,实现海上风电巡检任务的自主作业。据HydroSurv 公司估计,该无人船投产并推广后,能够使海上风电勘测和检查成本降低最多60%,有效促进英国2050 年“碳中和”目标的达成。
在新技术研究方面,2020 年起,英国Ocean Infinity 公司与朴次茅斯大学等单位合作,开发自主的海上风电场检测技术,即“无人驾驶检查风力发电机组的无人机群”项目。该项目将建成以无人船作为母船,配置数量众多的微小型无人机群的系统,可实现无人机群的起降、存储、充电,并通过卫星通信将数据传输到岸上指挥中心。该系统由无人船搭载无人机群,以自主航行的模式进入海上风电场,利用5G 和卫星通信与控制系统连接,自主控制无人机群自动检查风力涡轮机,从而无需手动控制和人工检查。该项目将于2022 年开展海上试验。
基于目前的国内外现状,本文提出了将无人机和无人船/艇系统以无人值守部署的方式应用于海上风电巡检的思路。该系统直接部署在海上风电场,无需用船运抵风电场,陆上调度中心可以通过卫星通信等手段远程操控无人机和无人船/艇对海上风电机组进行巡检,有效降低人员乘船携带相应巡检设备到现场进行作业的次数,从而节约成本并可节能减排。
2 海上风电无人值守系统构成及技术难点
2.1 无人值守系统原理
与传统的无人机和无人船/艇不同,无人值守系统为无人机配置了智能机场,如图1 所示;为无人船配置了智能船坞[6-7]。智能机场和智能船坞为无人机和无人船提供了储存、充电、维护等功能和保障,智能机场和智能船坞还具备防水、防盐雾腐蚀、防盗等能力,保障无人机和无人船野外及海上部署的安全。目前,无人值守无人机系统已在海洋、林草、电力等行业得到初步的应用,大疆、复亚智能、航天中为等多家企业已有成熟的产品;无人值守无人船系统目前仍处于研发和试航阶段,尚未有成熟的产品问世,珠海云洲和四方智能是其中的领先者。
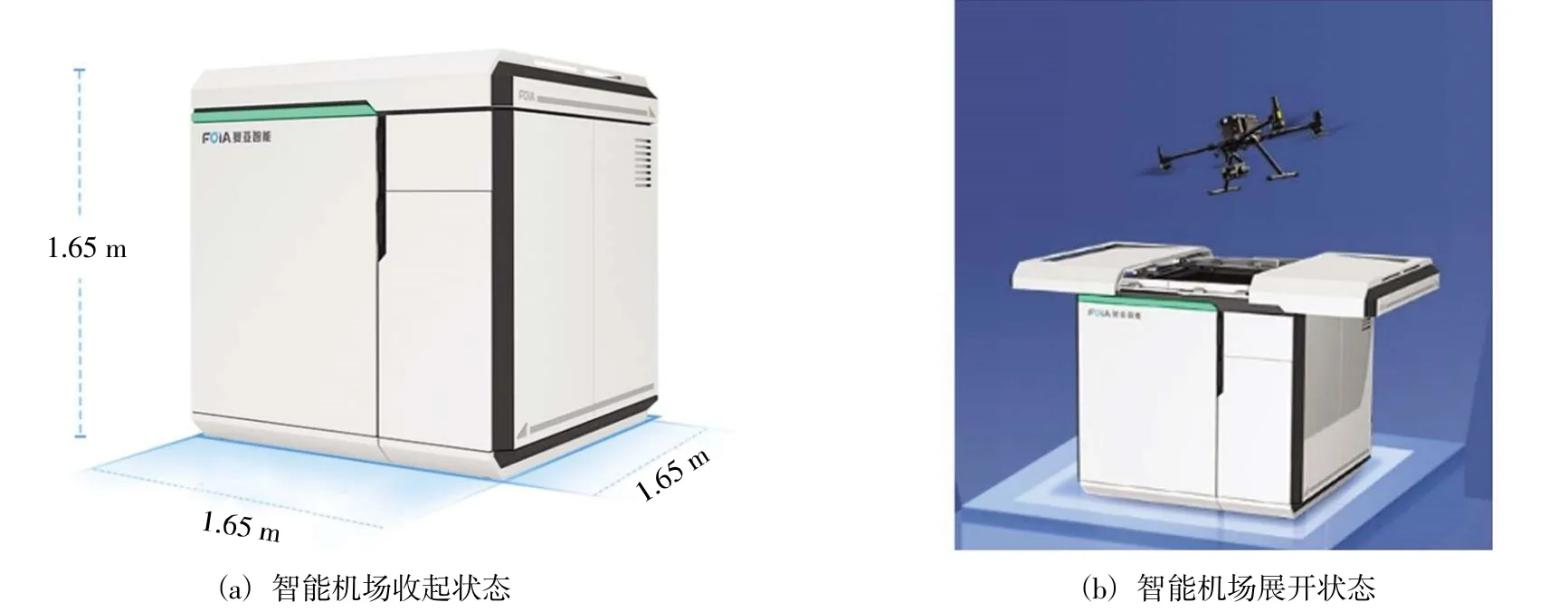
图1 无人值守无人机系统(智能机场)
无人值守系统的核心是智能机场和智能船坞。
智能机场根据所携带无人机尺寸的不同,一般为棱长小于2 m 的长方体,重量在30~150 kg。其内部设有承载无人机的升降平台、充电模块,以及载荷管理模块等。智能机场工作时,先打开顶部的舱门,升降机构托举无人机出舱,无人机起飞;降落过程与之相反。在舱门关闭后,充电模块与无人机的供电模块通过触点连接开始充电,充电完成后,充电模块与无人机分离。
智能船坞一般尺寸在长9 m、宽5 m、高3 m的长方体范围内,其尺寸与无人船/艇的尺寸正相关。由于采用海上无人值守的部署方式,因此,无人值守无人船/艇系统采用电力驱动方式,而非传统的汽油、柴油驱动;智能船坞也要求是封闭的舱体,采用浮台、浮筒等手段使其漂浮在海面上,并通过系泊机构与岸基连接。智能船坞内部包含无人船/艇升降平台、固定机构、充电模块,以及载荷管理模块等。智能船坞工作时,无人船/艇完成作业任务自主返航至智能船坞附近,自动发送进坞信号;智能船坞接收到信号后打开舱门,放下升降机构,等待无人船/艇驶入,同时,自动检测无人船/艇是否入坞并行驶到泊位;检测无人船/艇到位后,固定机构固定无人船/艇的位置,并调整其姿态至储存状态;升降机构启动,将无人船/艇提升至充电模块,开始充电。出舱过程与回舱流程相反。
智能机场和智能船坞均配有供电系统、通信系统、环境感知系统和安防系统。供电可根据部署的位置采用光伏、风电、市电、潮汐能等多种方式;通信采用卫通、4G/5G、微波等手段;环境感知系统配备温湿度及风速风向传感器;安防系统配有监控云台探头、探照灯和蜂鸣器。
2.2 海上风电无人值守系统组成
海上风电无人值守系统构建了“天、空、岸、海”一体化监测、通信与处理体系,如图2 所示。实现了感知无人值守式智能监测、通信实时性传输、数据智能化处理。其组成包括无人值守无人机系统、无人值守无人船/艇系统、远程通信系统、软件系统和数据处理系统,如图3 所示。各系统由相应的软硬件设备有机结合并协同工作。
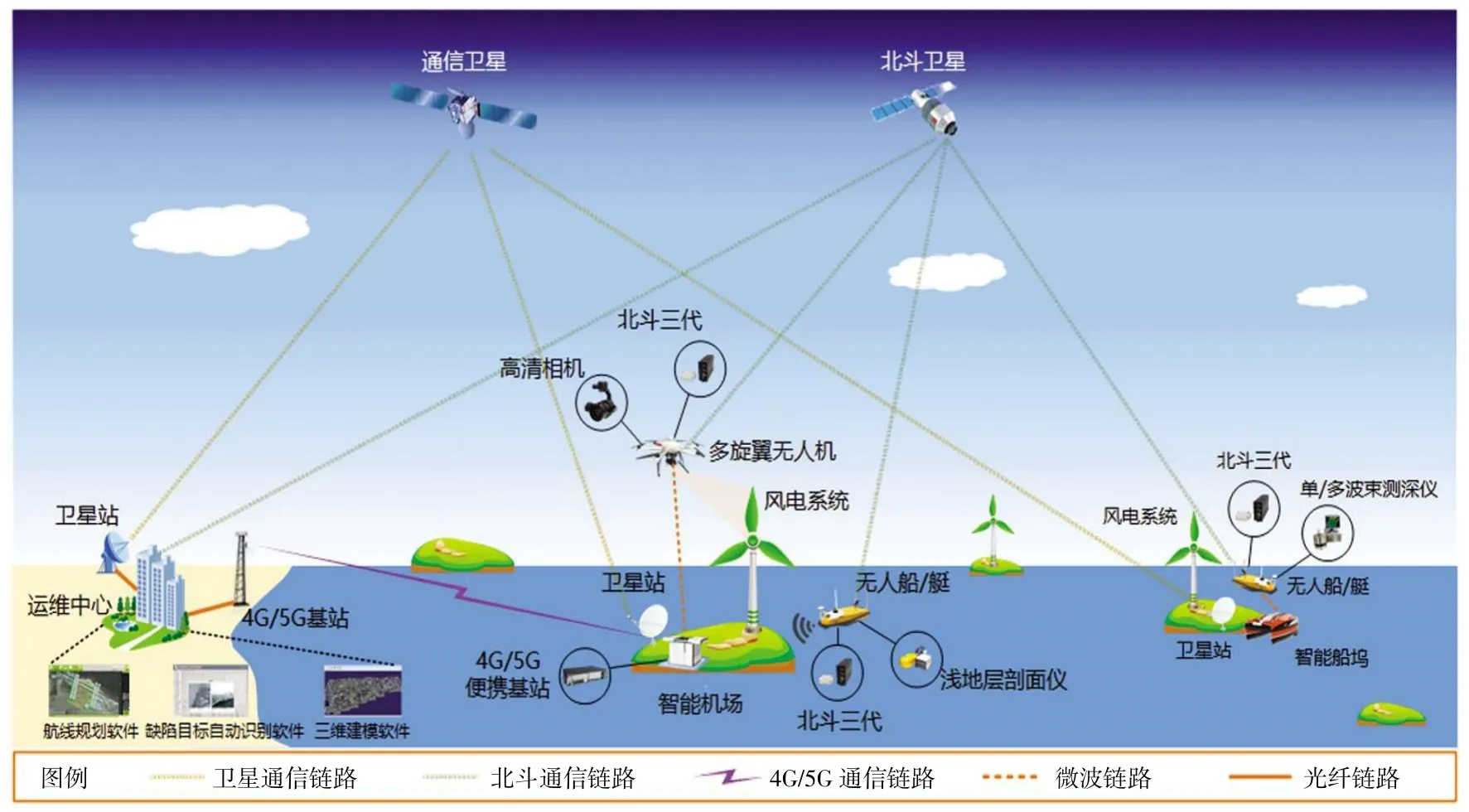
图2 海上风电无人值守系统总体示意图
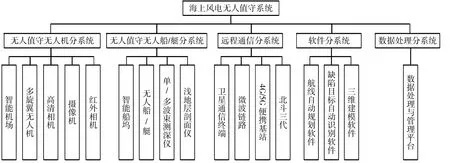
图3 海上风电无人值守系统组成
2.3 海上风电无人值守系统架构
海上风电无人值守系统架构包括感知层、通信层、应用软件层和业务应用层,如图4 所示。
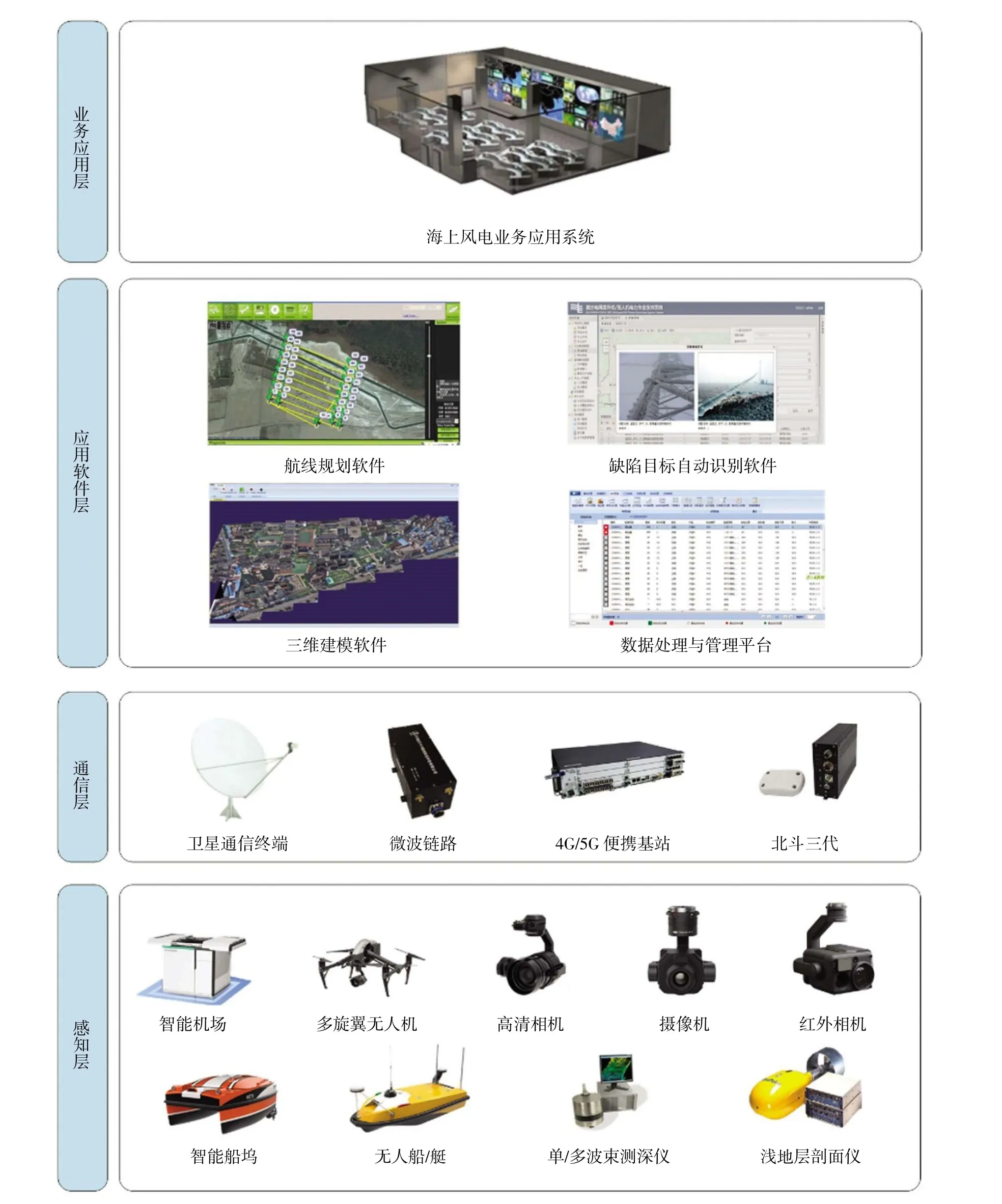
图4 海上风电无人值守系统架构
感知层面,无人值守无人机和无人船/艇系统远程部署到海上,搭载高清相机、多波束等多种载荷按预先设定的任务开展作业。任务完成后返回自动充电,无需人工搬运和干预,实现真正的自动化作业。
通信层面,远程通信系统根据离岸距离和数据传输量等需求,灵活配置4G/5G、卫星通信、北斗、微波等通信手段。无人机与无人船/艇作业获取的数据通过其自带的无线通信模块实时回传至智能机场和智能船坞,并由远程通信系统中继转发至远方的指挥中心,解决了数据时效性问题。
应用软件层面,指挥中心可远程设定巡检任务及航线,实时监控远程设备的位置、行动轨迹、周边状态等信息;并采用边云协同的方式,基于边云数据库和目标库,利用AI 智能算法自动开展缺陷目标识别,辅助人工筛查,所有数据最终汇入数据处理与管理平台。
业务应用层面,由数据处理与管理平台向海上风电管理部门的业务应用系统推送数据,辅助海上风电的日常运维和管理。
2.4 技术指标及难点
海上风电无人值守系统的技术指标体系应包括任务类指标和保障类指标。任务类指标包括飞行/航行时长、带载荷能力、目标观测能力、数据传输速度、数据处理能力等;保障类指标包括供电能力、抗风抗雨防霉菌等环境适应性、平均无故障时间、自我防护能力等。典型技术指标如表1 所示。
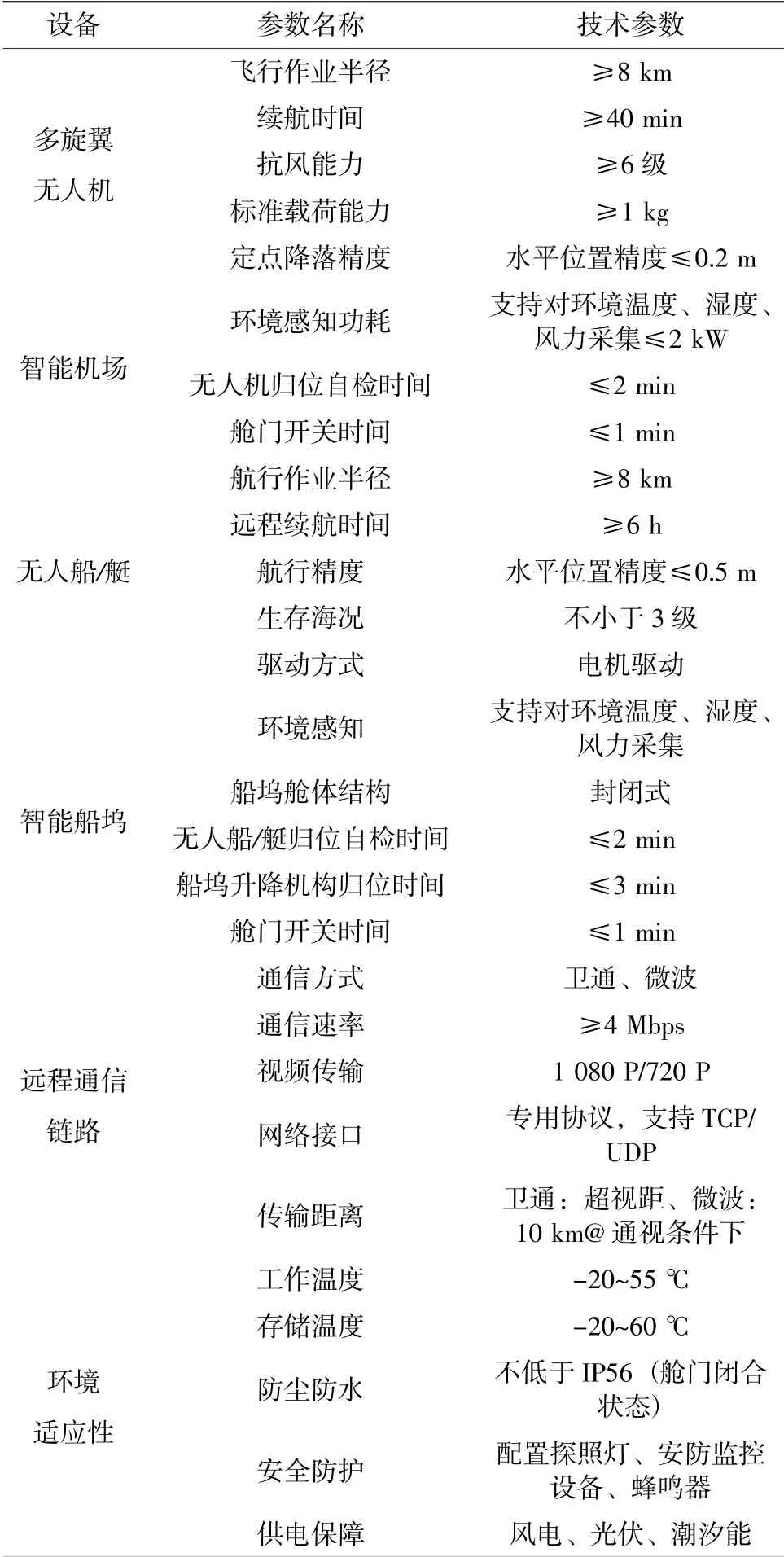
表1 海上风电无人值守系统典型技术指标
海上风电无人值守系统的主要技术难点包括:
(1)无人机、无人船/艇的自主回舱归位:无人机和无人船/艇在执行完任务后,需自主返回智能机场和智能船坞充电,因此,如何保证在其自主返回的状态下,精确降落至智能机场和进入智能船坞是系统要解决的技术难点。采用激光测距结合北斗差分定位的方式,可有效提升无人机降落和无人船/艇入坞的位置精度。
(2)无人机、无人船/艇回舱后安全自动充电:传统利用触点的接触式充电方式,在海上应用时有受潮遇水短路的风险,因此需重新设计智能机场和智能船坞的充电模块,以及无人机和无人船/艇的供电模块。采用无线充电的供电方式,利用无线线圈方式充电,充电模块与外部供电系统连接,如光伏、潮汐能、风电等。
(3)无人机、无人船/艇采集数据的远程传输及实时监控:在无人值守状态下的海上风电巡检,对采集到数据的传输提出了较高要求。要求无人机、无人船/艇的监测数据,及其本身的运行状态数据、巡检轨迹数据等能够实时回传陆上指挥中心,实现数据的分析处理和设备的状态监控。要重点解决海上没有网络信号区域风电场的通信问题。采用卫星通信方式作为微波、4G/5G 等传统通信方式的补充,利用中星12、中星16、亚太6D 等通信卫星的高带宽超视距通信能力,可有效实现数据的高速传输。
(4)海量数据的自动化快速处理:无人机和无人船/艇在自主巡检过程中会获取大量的数据,全部通过通信链路回传至陆上指挥中心,对信道的压力较大,也会显著增加通信资费。因此,系统采用边云混合计算技术,在无人机和无人船/艇前端加入数据处理模块,将一部分简单的数据处理任务放在前端,而不必所有数据都回传指挥中心。根据卫通、微波等传输网络的宽带传输、窄带传输等带宽能力的不同和变化情况,动态调整边云前端、后方云端的计算能力。前端实现数据的快速预处理、粗识别和缺陷分裂,后方云端实现高精度后处理和定量分析。
3 海上风电无人值守系统工作模式
在非工作状态下,无人机和无人船/艇分别停放在智能机场和智能船坞内。智能机场可部署安装在海上风电场的升压站平台,或部署在风电机组机舱上和风电机组基础上。其安装位置不得干扰风速风向仪、激光测风雷达、光电球头等气象和观测装备的正常工作;智能船坞始终浮于水域平面上,通过系泊机构与海上风电场的升压站和风电机组的基础固定相连,如图5 所示。

图5 无人值守系统的部署
在工作状态下,为了获得高质量的巡检数据,要求无人机携带高分辨率相机,并从不同位置和角度拍摄风电机组部件。通过边云协同缺陷自动识别AI 软件可以分析这些图像,以确定风电机组是否存在缺陷或损坏的早期迹象,并确定适当的维护操作,以防止故障的发生。无人船/艇配置高精度实时三维声呐和浅地层剖面仪,与智能船坞预留通信与数据接口,实现采集数据的高效远程传输。另外,智能机场和智能船坞内还可实现无人机、无人船/艇载荷的自动换装,可根据巡检需求配置包括视觉和热传感器、红外传感器、多波束测深仪、浅地层剖面仪等,以捕获不同类型的数据[8]。海上风电无人值守系统具体工作流程如下。
(1)指挥中心主控室下达临时和应急任务,或预设常规巡检计划,设定定时开始的工作任务。任务信息通过4G/5G、卫星通信或微波链路等通信设备,远程发送至海上风电场部署的无人值守系统。
(2)无人值守系统接收到远程传输的巡检任务后,锁定任务目标风电机组,自动规划无人机和无人船/艇的运动航线,或按照任务信息中的预设航线载入系统。同时,智能机场和智能船坞分别打开舱盖和舱门,无人机和无人船/艇快速出舱,按规划好的运动航线抵达目标机组附近。
(3)无人机和无人船/艇抵近目标机组过程中,无人船/艇以风电机组为圆心,自动规划巡检航线;无人机自动识别风机朝向和轮毂中心,自动规划巡航点位,生成巡检路线,如图6 所示。
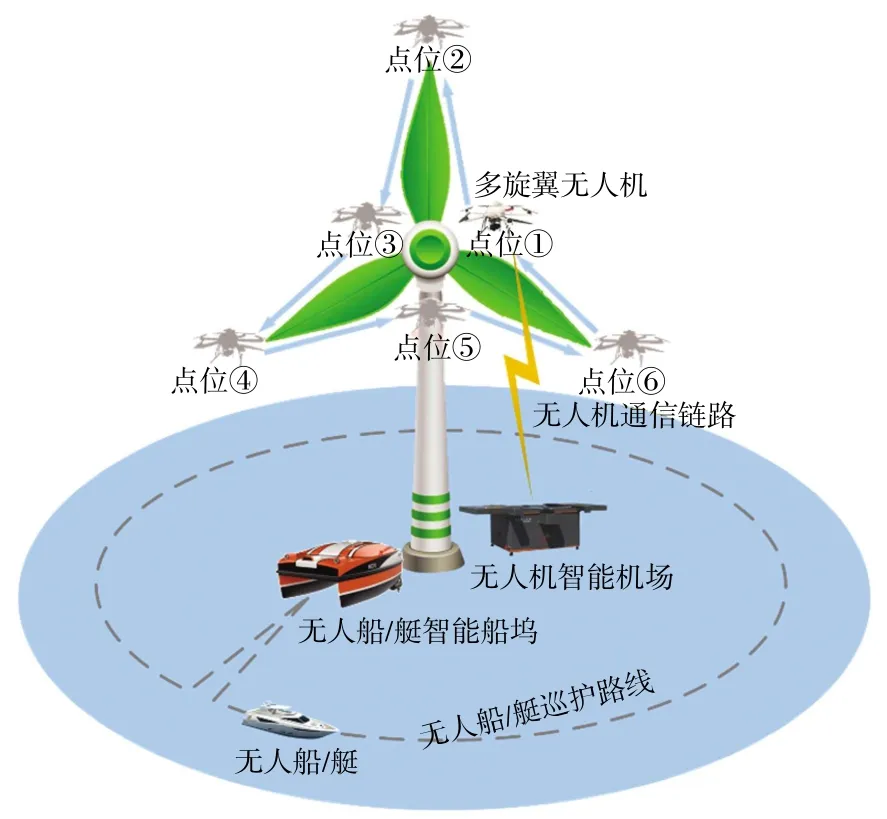
图6 无人值守系统巡检方式
(4)无人机和无人船/艇根据规划航线执行巡检任务。其中,无人机飞行过程中及时调整相机的指向,确保风机叶片处于照片中间位置。
(5)巡检获取的数据可根据任务需要,采用无人机和无人船的机/船前端处理,或由智能机场和智能船坞进行通信中继,通过4G/5G 或卫星通信等手段实时回传至指挥中心主控室,处理并生成报告。
(6)巡检任务完成后,无人机和无人船/艇根据任务要求和剩余电量,智能判断前进至下一个目标风机,或沿原路径返回智能机场和智能船坞,进行自动充电和状态自检,等待下一次任务。
大规模风电场的风电机组可达数十甚至上百个,如图7 所示。2021 年4 月2 日,广东金湾海上风电场全容量并网发电,总装机容量达到30 万千瓦,共有55 个海上风机,用海面积至少达30 km2。因此,巡检时需配合风机的停机时间,采用多套无人值守系统并行作业。无人机、无人船/艇自主巡检约15~30 min 完成一个风机的巡检任务,一个架次/航次可巡检2~3 个风机后返回智能机场和智能船坞自动充电,充满后可继续执行任务。根据整个海上风电场的规模、用海面积、风电机组的平面分布,以及无人机和无人船/艇的续航时间及任务要求,可在整个风电场部署若干套无人值守系统,每套无人值守系统负责自己周边一个区块的若干个风机的巡检。这样,多套无人值守系统可同时同步作业,按照既定的航迹、路线完成整个风电场的自动化无人巡检,还可有效减少巡检过程中的停机时间,提高巡检效率,如图8 所示。同时,无人值守系统根据性能差别,价格差异较大。按照至少5 年的生命周期,及定期的维护保养,分摊到每年的硬件成本在15~50 万元/套之间,通信服务成本在5~10 万元/套。相较于高频次的出海巡检单日数万元、每次任务数天的成本,在经济上具有一定的优势,可成为传统巡检模式的有效补充。

图7 海上风电场

图8 无人值守系统多机区块化部署
4 结 论
本文提出一种无人值守无人系统在海上风电巡检的应用构想,系统由无人值守无人机、无人船/艇,以及航线自动规划软件、缺陷自动识别软件、数据处理与管理平台等组成。无人机和无人船/艇在接收到远程巡检任务指令后出舱作业,任务完成后,自动返回停机舱和船坞充电,准备下一次任务。远程运维中心可以制定周期性巡检任务,无人值守无人系统可按照制定好的任务计划,自动出舱、自动巡检、自动回充,巡检数据可进行自动化智能处理,通过卫星通信、4G/5G 等多种通信手段回传至运维中心。当发现有损伤及缺陷时,再制定维修计划,择机出海维护,可有效提升作业效率,避免不必要的出海作业,节约成本。这种智慧运维方法适用于大范围的海上风电场,以及中远海等船舶抵达周期长的风电场,是传统海上风电巡检与运维的重要补充手段。
猜你喜欢
水泵技术(2022年3期)2022-08-26 08:59:20
岩土工程技术(2019年6期)2020-01-06 03:19:42
船舶标准化工程师(2019年4期)2019-07-24 07:21:24
小哥白尼(军事科学)(2019年2期)2019-04-17 02:17:28
小哥白尼·趣味科学画报(2019年12期)2019-02-28 11:55:02
电子制作(2018年17期)2018-09-28 01:56:44
兵器知识(2018年4期)2018-04-18 09:31:34
岷峨诗稿(2017年4期)2017-04-20 06:26:43
新高考(英语进阶)(2017年12期)2017-02-26 11:37:34
通信电源技术(2016年4期)2016-04-04 02:57:38