
农业机械自动导航技术研究
2022-06-20 07:20:04王善飞
乡村科技 2022年6期
王善飞
(阿尔山市农牧技术推广中心,内蒙古 阿尔山 137800)
0 引言
随着科学技术的不断发展,我国农业机械正朝着自动化、数字化、智能化等方向发展,以最大限度地提高农业机械设备作业质量和生产效率,降低农业生产成本,为实现农业产业兴旺奠定坚实基础。在此背景下,越来越多的专家学者将农业机械自动导航技术引入农业生产过程,并凭借优化作业方式、提升作业效率、降低农民劳动强度等诸多优势,使农业产业向着更加智能化、精确化的方向发展,为人们的生产生活服务,从而促进我国现代农业飞速发展。在此背景下,对农业机械自动导航技术的探讨和研究具有重要的理论意义和现实价值。
1 自动导航技术概述
自动导航技术是由计算机网络技术、电子信息与通信技术、控制技术等诸多学科系统集成的一项综合技术类别,在现代农业、工业中的应用范围越来越广阔,已然成为当代农业机械设备智能化发展的重要技术支撑。目前,自动导航技术在土地整理、农业播种、农业植物保护及农产品采摘收割等方面应用广泛。
2 农机自动导航系统的典型结构
农业生产中的自动导航控制系统主要是利用农业机械自身携带的传感器感知周围环境和车体的信息,通过对获取信息处理并进行导航决策和控制,从而完成相应的农业生产任务。其中,农机自动导航技术主要包括环境感知技术、导航控制技术和地图构建技术。现代农业自动导航控制系统主要包括检测单元、控制单元、执行单元和监控单元4部分,其架构如图1所示。

图1 农机自动导航系统架构
在农机自动导航系统的应用中,检测单元主要负责检查农业机械设备当前位置和预期设定的具体坐标值之间的差异,由位姿传感器、车轮转角传感器等传感设备获取相关速度信息和坐标信息,用于测量当前农业机械设备的具体坐标值、航角角度、俯仰值等参数信息,测量机械设备在作业过程中姿态角、速度等参数的变化,测量农机设备的运转速度、运转角度和前进方向。其中,车轮转角传感器主要是为了测量农业机械设备在转载位置调转时的车轮转向角度信息,用于控制车轮的回路反馈。
控制单元是农机自动导航系统的核心部分,主要负责农业机械设备的种植路径规划及跟踪控制。控制单元能通过位置参数提取和计算得到具体的转向角、偏差值等参数,通过转向角指令获得相应的前进方向和参数设置。转向控制器能按照转向控制量中的频率参数、电压参数等实现机械设备的转向,使农业机械设备转到与转向角指令符合的角度与位置。
执行单元是农机自动导航系统方向转变和速度调节的重要执行机构,主要是通过控制器的控制信号,使农业机械设备里的转向轮以一定大小的转向力矩发生转变。转向执行机构主要包括机械式转向机构和液压式转向机构2种。通常,机械式转向机构主要通过控制农业机械设备的电机运行而驱动整个机械设备转向,快捷简单,安装方便,实际应用范围较广;液压式转向机构则是利用自动转向液压回路实现对农业机械的转向操作。液压式转向机构较机械式转向机构精确度更高,且整个转向过程执行速度更快、操作更加便捷、可靠性更加优良。
监控单元是农机自动导航控制系统的人机交互界面,主要由田间计算机承担,可对农机自动导航系统的参数优化设置、优化农业生产过程中的任务以及对整个农机运行状态和导航状态等进行 监管。
3 农机位置测量方法
3.1 基于机器视觉的位置测量方法
机器视觉主要是指借助计算机模拟人体视物功能,从外在世界客观存在的事物图像中提取参数数据,处理后获得深度信息并加以理解,并将该信息用于后续对同类客观事物的检测和控制。由于该技术参数信息提取速度快、信息量提取容量大且兼容性功能多,故能借助该参数优化位置测量技术,进而为农机自动导航奠定坚实的技术基础。在此过程中,以摄像机为位置测量的前端数据接收传感器,识别并抓取具体农作物的参数信息后,确定农机设备在农田任意范围的位置信息,确定导航基准线,能够通过农作物识别、导航基准线确定及参数界定等诸多方式,利用垂直投影法、最小二乘法等实现定 位功能。
3.2 基于全球卫星导航系统的位置测量方法
基于全球卫星导航系统(Global Navigation Satellite System,GNSS)的位置测量方法是对基于全球定位系统(Global Positioning System,GPS)的位置测量方法的优化。现阶段应用时间跨度最长、应用范围最宽泛的是美国的GPS系统,但该系统所使用的普通GPS设备的参数精度在10 m左右,难以满足现代农机化发展背景下田间种植业的导航控制需要。而动态后处理技术采用更高级的设备,有助于提升导航精度。应用于农业机械设备导航系统中的主要是四天线的GPS-RTK系统。该系统能为拖拉机、收割机等提供位置信息,使农业机械设备在农作物田间行驶速度为3.2 km/h的前提下横向误差不大于0.1°,使其直线运行标准与周边作物标准之间的差距小于2.5 cm。此外,GPS-RTK技术能进一步通过基站应用及虚拟基站建设等多种差分修正措施,进一步增强对卫星定位系统参数误差的修正能力,从而在某一具体试验区根据试验结果对不同农作物的作业需求给出相应的GPS卫星定位修正信号,进一步缩小其与农作物之间的位置误差。
3.3 基于多传感器信息融合的位置测量方法
基于多传感器信息融合的位置测量方法,主要是为了应对复杂多变的农田环境等而研发的。由于田间环境复杂多变且呈现出不可控制性,因此,机器视觉位置测量法很可能受到田间农作物的实际生长状态及当前农机使用时的天气条件变化影响,GNSS测量方法则易因周边环境的电磁干扰而使定位精确度大打折扣。也就是说,在农机自动导航系统应用单独的位置传感器不能满足不同农田环境条件下的测量精度要求,也就不能满足不同应用条件的农机导航需要。因此,基于多传感器的信息融合的位置测量方法受到了相关学者的关注和重视。多传感器能通过获取数据相互融合,减小传感器接收的相关数据信号的误差,也能在某一传感器参数接收失效时将其自动转化为另一种可用的传感器测量方式,使农机自动导航系统能在多种传感器数据的相互融合和相互验证中得到更好的测试结果。表1为3种不同农机位置测量方法的优劣对比。

表1 3种不同农机位置测量方法的优劣对比
4 导航控制策略
4.1 PID控制
PID控制策略主要是通过比例变换、积分变换及微分技术等控制农机自动导航系统,主要适用于线性变化且动态特性不随时间变化的系统。典型的PID控制系统架构图如图2所示。该系统能降低对数学模型的依赖性,使得系统参数位置提取时的鲁棒性较强、稳态误差更小,使其在农业机械导航控制方面有着广泛应用。
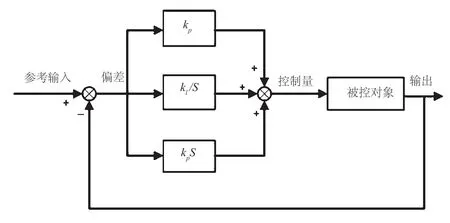
图2 典型的PID控制系统架构
4.2 模糊控制
模糊控制策略主要是以模糊集合理论、语言变量和逻辑推理等为基础,采取理论支撑的特殊控制方式。该方式并不需要建立农田间农作物和机械设备之间的数学模型,因而能广泛适用于非线性变化的随时间变化的数学结构。典型的模糊控制结构如图3所示。
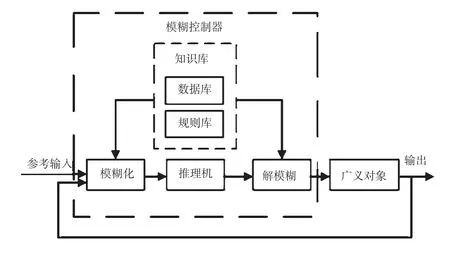
图3 典型的模糊控制架构
4.3 神经网络控制
神经网络控制策略主要是指在农机自动导航控制系统中利用神经网络体系对非线性对象进行建模,从而克服农田间机械设备运行不确定、可实时变化、动态影响较大等问题,实现对田间设备的精确控制,能通过对人工特征的提取控制田间机械设备的导航系统,从而在比较向量机和人机网络结构的基础上找到更加适合农田机械设备运行的路线,使向量机和人工网络模型的准确率大幅度提高。
4.4 基于模型的控制
基于模型的农机自动导航控制系统主要是指通过农机运动学和动力学模型,实现对农田间农业机械设备路径的模拟和跟踪。例如,某拖拉机拖车导航控制系统,能通过非线性模型模拟田间控制拖车的实际运行路径,全过程跟踪该路径,并借由模型控制其运转速度、运转方向等。
5 结语
农业机械自动导航技术作为我国现代农业发展中的重要成果,能切实保障农业生产质量,也能降低农业生产中工人的工作强度,促进我国农业集成化发展,提高农产品生产效率等。基于机器视觉、GNSS的位置测量和多传感器信息融合等位置测量方法,能使农机位置得到更精确的修正,从而使农业机械在PID控制、模糊控制、神经网络控制等诸多导航控制策略的引导下,实现作业质量和作业效率的快速提升,为我国现代农业和智能农业发展奠定坚实的基础。
