
倾斜摄影测量技术在港口条带状地形中的应用研究
2022-06-17 05:36:26亢保军
港工技术 2022年3期
王 頔,王 朝,亢保军
(中交第一航务工程勘察设计院有限公司,天津 300220)
引言
近年来,倾斜摄影测量技术逐渐发展成为了地形测量的主流技术,该技术通过无人机搭载多个镜头相机,采集多个视角的地物影像数据,获取地物顶部及侧面高分辨率纹理信息,通过空三解算和建模方法,构建实景三维模型。朱征等[1]以倾斜摄影测量技术对白格堰塞区复杂环境进行了三维数字模型重建,讲解了无人机数据采集的步骤要点。毛清政[2]对倾斜摄影测量中影响模型精度的像控点数量展开探讨。曲林等[3]在数据采集的基础上讲解了实景三维建模的方法,并对其应用领域进行了探讨。罗万波[4]通过对泉州地区进行三维建模,提出了生产三维实景模型的方案,并探讨了大规模实景三维模型的数据管理方法和基于表面约束水面重建的解决方案。随着该技术的发展,倾斜摄影测量技术也逐渐应用于水运行业,但由于港区地形多为涉水区域,尤其是条带状的地形如延伸出去的防波堤,LNG 码头等纹理信息较弱,难以通过空三解算形成三维实景模型,因此本文针对港口地区条带状地形进行对比研究。
1 研究内容与流程
本次研究共分为四个方面的内容,通过选取已有项目中条带状地物,对比分析其技术方案的设计,像控点的布设方案、空三解算精度及模型精细程度四个方面,寻找适用于港口地区条带状地物的倾斜摄影测量采集方法,技术路线如图1 所示。
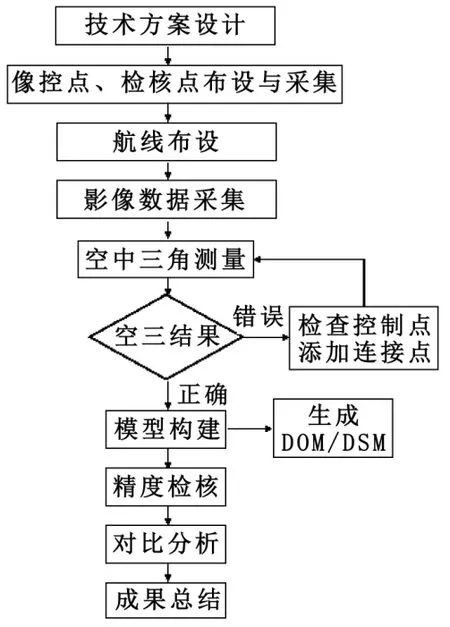
图1 技术路线
2 研究区域概况
本次研究共选取已有项目具有代表性的三个常见的港区条带状区域开展本次研究工作,三个研究区均大面积涉水,且存在大面积弱纹理信息特征地形,以此开展倾斜摄影测量技术的应用研究十分具有代表性,如图2 所示。研究区1 为常见延伸入海的码头类型,长约1 000 m,宽约20 m 的弱纹理道路,两侧均为海水,延伸区域长约220 m,宽约70 m,四面环水;研究区2 为港区常见的防波堤类型,该区域长约1 400 m,宽约17 m,为扭王字块堆积而成,两侧随海水涨落潮显现,人员行走困难且难以寻找平面位置进行像控点布设。研究区3 为近港口的倒L 型码头,四面环水,且有架空管道及各种附属设施,离岸长约140 m,宽约30 m,南北向长约340 m,宽约20 m。

图2 研究区域示意
3 对比分析
3.1 技术方案的设计
本次开展的相关研究均使用大疆M600pro 六旋翼无人机搭载睿铂RIY-D2Pros 五镜头相机进行数据采集工作。研究区1 设置南北向沿长边飞行,飞行高度90 m,飞行范围由于大桥为路面无高大建筑未外扩航高,东西向延伸区域由于存在高达建筑单独外扩航高90 m,地面分辨率1.6 cm,航向重叠率80 %,旁向重叠率83 %,共飞行2 个架次。研究区2 设置垂直于长边飞行,飞行高度120 m,为保证地面高大建筑物的侧面纹理,飞行范围外扩航高120 m,地面分辨率2.1 cm,航向重叠率80 %,旁向重叠率83 %,共飞行1 个架次。研究区3 设置沿防波堤长边方向飞行,飞行高度60 m,由于防波堤地面起伏不大,所以未外扩航高,地面分辨率1.1 cm,航向重叠率80 %,旁向重叠率83 %,共飞行3 个架次。
3.2 像控点的布设方案
研究区1 考虑到该区域长度达到了1 000 m,且桥面均为路面,纹理较少难以识别,为确保模型精度,采用成对布设的方式布设像控点,每间隔约250 m 布设一对像控点,共计布设像控点13 个,像控点分布如图3(a)所示。研究区2 由于防波堤区域较难找到平面位置,且防波堤中间高两边低的形态分布,采用单点布设的方式布设像控点,每间隔约260 m 布设一个像控点,共计布设像控点6 个,像控点分布如图3(b)所示。研究区3 由于测区面积较小,采用四个角点的方式布设像控点,共计布设像控点4 个,像控点分布如图3(c)所示。
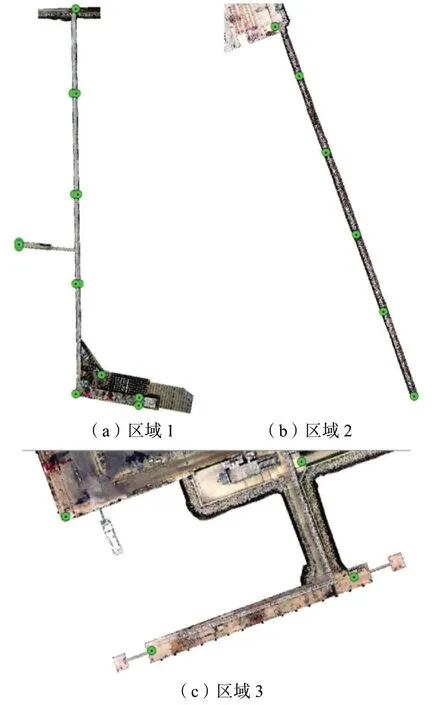
图3 像控点分布
3.3 空三解算精度
将采集数据导入Smart3D 软件进行空中三角测量,通过使用原始POS 数据做刚体变换进行初步空三计算,提取特征点,进行同名点匹配、迭代平差、畸变矫正获取外方位元素,然后根据初步空三成果进行控制点刺点,使用控制点进行平差计算,直至空三结果正确且精度满足规范要求,通过空三解算结果生成实景三维模型。为实际检验实景三维模型建模精度,通过研究区采集的均匀分布的检核点进行精度检核,在三维模型中刺出检核点位置,最后将检核点影像刺点坐标与实测坐标进行对比。经统计研究区1,平面中误差0.018 m,高程0.020 m;研究区2,平面中误差0.034 m,高程0.018 m;研究区3,平面中误差0.066 m,高程0.010 m。
3.4 模型精细程度
综合对比三个研究区的实景三维模型,通过观察模型是否有扭曲变形、漏洞、飞点等问题判断模型的精细程度,经过对比发现研究区2 实景三维模型精细度最好,防波堤无任何扭曲变形及破洞现象。研究区1 及研究区3 的三维实景模型效果均完整较好,但存在局部轻微扭曲变形,如镂空的设施(如镂空铁门、信号塔、输油臂等)存在局部空洞使用单一颜色补充现象。
1)研究区1 的整体实景三维模型完好,大桥桥面连接真实平整,但由于桥面区域未外扩航高,底部桥墩区域未露出,需后期单体化修模进行补充;模型中的高大建筑完整真实,房角线平直无错位,但镂空的设施如房顶的信号塔、栅栏型铁门则显示存在部分缺失,可移动的龙门吊考虑移动作业的原因存在小型局部破洞(已进行单一颜色补充),如图4 所示。

图4 研究区1 三维实景模型局部放大
2)研究区2 的整体实景三维模型完好,整条防波堤显示完整,连接无扭曲变形、破洞现象,各个扭王字块显示真实,无扭曲变形现象,如图5 所示。
3)研究区3 的整体实景三维模型完好,长条形路面及管线架显示真实完整,路面平整、标线完整,管线架显示完好,各管道线路清晰,连接无扭曲错位。高大镂空的设施设备如输油臂存在小型局部破洞(以进行单一颜色补充),如图6 所示。

图6 研究区3 三维实景模型局部放大
4 小结
本次研究选取了港口具有代表性的三块条带状区域作为研究区开展本次对比研究工作,分别从技术方案的设计,像控点的布设方案、空三解算精度及模型精细程度四个方面进行对比分析,寻求适用于港口条带状区域数据采集方法。通过上文四个部分的对比分析,发现以下几点操作可显著提高空中三角测量通过度及模型精度:
1)飞行条带状区域时应适当降低飞行高度,保证每张图片中的地形数据占据1/3 以上,避免水体过多。
2)若沿长边飞行,适当提高旁向重叠度,保证测绘区域覆盖多条航线,若条件允许的情况下垂直于长边飞行效果更好。
3)像控点布设时成对布设模式可提高空中三角测量通过度,且模型精度更高。
5 结语
通过倾斜摄影测量技术对港区条带状特征的三块研究区域进行了对比研究,总结出适用于大范围水域中条带状地形的数据采集方法,具备较强的实操性,可得到高精度的实景三维模型,为类似的倾斜摄影测量技术应用场景提供新的解决思路和参考借鉴。
本文的研究数据均为具体项目实施过程中所采集和处理的实景三维模型,所采用的技术方法也以满足工程要求为主要目的,未进行针对性的固定航高、固定航线方向、固定像控点数量或间隔等单一因子的分析研究,故所得结论仅为针对已有研究成果做出的总结,在今后的工程应用中还需经过进一步的实践检验。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
海洋通报(2020年6期)2020-03-19 02:10:34
建材发展导向(2019年10期)2019-08-24 06:24:52
当代工人(2018年21期)2018-03-06 12:41:08
中国港湾建设(2017年11期)2017-12-19 12:27:11
红蜻蜓·低年级(2017年6期)2017-10-30 21:07:54
北方音乐(2017年4期)2017-05-04 03:40:09
青少年日记·小学生版(2015年6期)2015-06-29 00:38:26
水利水电科技进展(2014年2期)2014-10-17 03:22:06
