
香蕉叶化身机器人?合成新型基于生物质微导管的微米机器人
2022-06-17 23:18
海外星云 2022年11期
香蕉叶成为科学家的“灵感缪斯”,研究成果有望用于癌细胞的精准捕杀和有机污染物的高效降解。
相关论文以《双功能生物混合式磁驱动微米机器人》为题发表,第一作者是陈婷博士,通讯作者为华南师范大学化学学院董任峰副研究员、蔡跃鹏教授和华南理工大学任碧野教授。

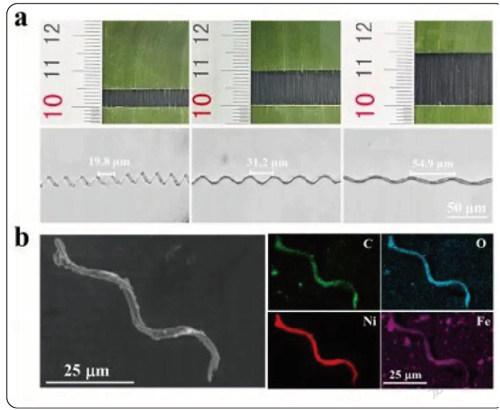
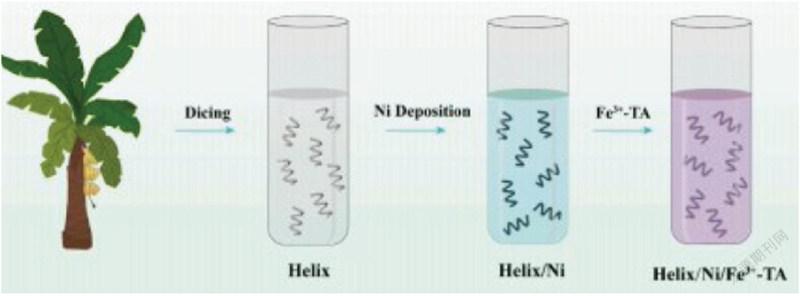
据了解, 在最初选材时, 该团队既希望能够既在功能上做到集成, 又对原材料的成本进行控制,且对结构和性能有一定要求。经过调研, 他们将从香蕉叶中分离出的螺旋状微导管选作生物模板用于构建磁驱动微米机器人的主体。

董任峰博士介绍说,之前将生物质结构赋予磁性对于设备的要求比较高,需要在真空环境下去完成,很难实现批量生产;有一些生物质甚至会在真空环境下,由于其中的水分迅速抽干,而导致其结构坍塌。因此,他们一改传统物理方法,而使用化学镀法。这样只需将提取的生物模板,在室温下泡到对应的化学溶液中,即可得到既具有较好的磁性又保留生物模板原始结构的磁驱动微米机器人。
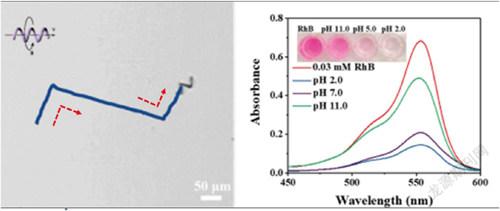
关于该研究潜在的应用场景,董任峰博士表示,之前的微纳米机器人通常只具备一种应用潜力,而他们所研发的基于生物模板的磁驱动微米机器人集成了生物医用和环境治理两方面的应用。该磁驱动微米机器人具有制造简单、成本经济、高效推进等多种优异的特性,在环境和生物应用方面展现出较好的应用前景。
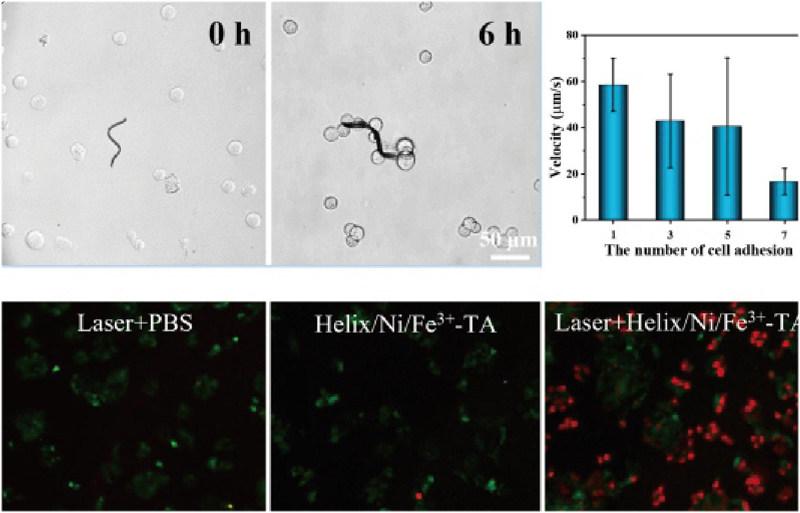
而在生物应用方面,该新型磁驱动微米机器人一方面通过其高度可控的运动性能可精准的靠近癌细胞,另一方面,由于该磁驱动微米机器人与癌细胞表面之间的特殊化学作用,令其可以精确捕获癌细胞。此外,由于表面修饰的功能材料F e 3 + - T a具有较好的光热作用,因此,在成功捕获癌细胞后,可进一步在光照下产生热量杀死这些癌细胞。该磁驱动微米机器人可实现对癌细胞精准靶向捕获、可控路径运输、高效光热杀伤一系列精细化操作,有望在未来生命体内进行微纳米级别的精准诊疗。
董任峰博士談到,他们团队还在光驱动微纳米机器人方面做了很多工作,未来希望这种基于生物模板的新型磁驱动微米机器人既有磁驱动的特点,又有光驱动的优势,以扩展到更多的应用场景。
总体而言,这项研究的亮点主要有两方面。一方面,其选用的生物模板具有天然的优势,后期人工修饰的材料具有可定向功能化的特点,从未来发展上看,将大自然中生物和人工材料相结合是大势所趋; 另一方面,微纳米机器人是当前的一种新兴科技,具有极其广阔的发展前景, 有望在生物探测、智能载药、环境治理、微纳米组装等多个领域发光发热,而此次的研究成果证实了微纳米机器人也可实现多功能集成,这可能在微纳米机器人领域成为一种新的趋势。

下一步,该团队将继续深入展开微纳米机器人应用方面的研究工作。董任峰提到,此次他们为微纳米机器人提供的磁驱动方式属于外场驱动型,之后会在外场驱动型微纳米机器人的制备、运动优化及应用方面开展更多基础性研究,尤其是在自然生物体与人工微纳结构结合的生物杂交机器人方面将做进一步推进,例如将微生物、微藻、细胞等和精细的微纳米结构相结合,希望能够开发出既具备生物体本身天然优势,又具备人工微纳结构指定功能的智能化“ 生命体-微机械”结合型微纳米机器人。
猜你喜欢
新传奇(2022年32期)2022-08-19
军事文摘(2022年12期)2022-07-13
少儿科技(2022年2期)2022-03-05
中国科学探险(2021年2期)2021-06-01
食品安全导刊(2020年6期)2020-06-15
工业设计(2018年4期)2018-05-14
智富时代(2017年10期)2017-11-22
智富时代(2017年10期)2017-11-22
大自然探索(2015年12期)2015-09-10
学苑创造·A版(2009年6期)2009-12-07
