自动驾驶场景下的车辆驾驶行为估计框架
2022-06-13 11:12:49刘敏
中国信息化 2022年5期
刘敏
近年来,针对自动驾驶各个领域的研究成果层出不穷。人们希望通过加大对自动驾驶技术的研发投入,最终从繁复的车辆驾驶任务中解放出来。
自动驾驶本身无疑是一项会颠覆人类交通出行方式的革命性技术。但和任何其他新技术的诞生与发展过程一样,自动驾驶的发展目前也面临着各种挑战和技术路线选择的问题。一种可能的演进路线是逐步地用高级别自动驾驶车辆或具备部分自动驾驶能力的车辆去替代现有汽车。在这样的假设下,道路上就会存在自主驾驶的车辆与人类驾驶的车辆混合并行的状况。这些自动驾驶车辆无疑会和人类司机驾驶的车辆进行频繁的交互,这就要求自动驾驶车辆能够通过车载传感器去获取到其他车辆的行驶状态信息。基于这些信息,自动驾驶车辆还应具备推理相应车辆的驾驶行为意图的能力。尤其是在自动驾驶车辆与人类司机驾驶的车辆可能产生互动时,对其他车辆的行为预测以及意图识别就直接关系到碰撞事故的发生与否。
由人类驾驶的车辆会基于司机的离散决策,开出一条连续的轨迹。如一位司机出于避让前方低速车辆或者试图获得更好地视野等原因,而作出了“向左换道”的决策。基于这一决策,我们能观察到车辆的速度会逐步增加,车头朝向偏向左侧车道,车辆位置逐渐向左侧车道靠近,
最终并入左侧车道继续直行。对这样一辆车的行为估计过程,包含了对其连续的驾驶情况的观测以及最终对司机意图(导致了所观测到的一系列轨迹的根本原因)的识别。为了更好地估计车辆驾驶行为,需要一个能够定性且定量描述车辆驾驶行为的框架方法。
在之前的很多研究中,司机、车辆的决策机制往往用一种混合状态系统来表示。这种系统提供了一种可描述车辆连续的状态参数以及离散的驾驶行为状态的耦合关系的直观模型。之前的研究中也借用了很多信号处理领域的理论工具来对此系统中的部分模块的状态进行识别。这使得此模型具备了一种基本的对车辆驾驶行为的定量估计。如使用中的隐马尔科夫模型来针对离散状态进行一种行为特征的识别,得到车辆司机的决策行为状态。这是一种可以识别观测值和产生这些观测值的隐藏状态之间的潜在关系的,用来描述随机过程的概率模型。隐马尔科夫模型早已在语音识别、人类行为预测以及驾驶事件识别上有了大量成功的应用。在本文中,车辆的连续观测量被建模为高斯混合模型,来对隐马尔科夫模型进行学习训练和评价。总而言之,混合状态系统提供了一整套行为估计的框架,而隐马尔科夫模型对完整系统中的各个状态模块间的关系进行定量描述。
本文中提出的混合决策系统同时参考了混合状态系统以及隐马尔科夫模型。其中混合状态系统用于发掘车辆和司机之间的交互状态,包含了驾驶员根据突发事件作出应对产生的高维的离散状态,以及车辆跟随驾驶员意图行驶形成的低层级的连续状态。像这类基于混合状态系统的理论也已经被广泛地应用在了自动驾驶领域。如图1所示,对于离散系统中的不同状态,其之间的交互及转换关系会被建模为有限状态机的形式。

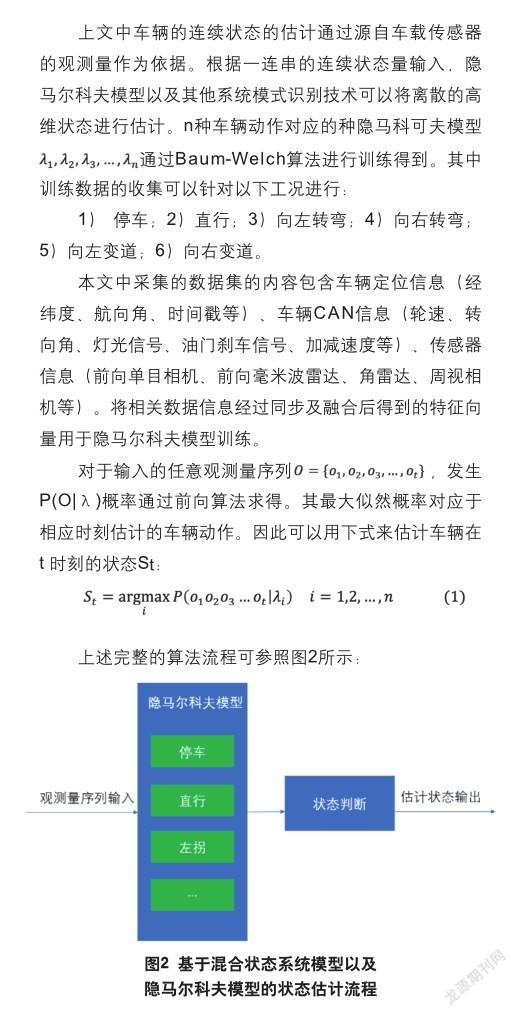
其中持續输入的观测量对应于车辆的连续状态,隐马尔科夫模型中的各种车辆行为取决于在建立数据集时特意收集的实际道路场景。通过(1)式的计算,输出当前时刻预测对象概率最高的离散状态。此离散状态即代表了当前驾驶员的行驶意图。隐马尔科夫模型则描述了连续的观测量与离散状态之间的关系。
上文主要关注驾驶员在特定地点、特点时间、特定工况下的行为估计,也即一种短期的行为估计。然而在实际应用过程中,会有对车辆的完整行为序列的预测需求,也即一种长期的行为估计。如一位驾驶员从家里开车出门,期间会经历一系列的事件以及作出相应的变道、转弯等行为来最终顺利抵达目的地。前文提到的混合决策系统尽管已经在司机的行为估计上有了很好的表现,但是其仍然难以对长时域的行为进行很好的预测估计。这一方面由于长观测序列带来的离散状态的似然概率缩减。同时该混合决策系统并没有将外部环境的信息纳入决策衡量的范围之内。
在混合决策系统针对车辆进行连续观测,并将观测量输入给隐马尔科夫模型进行高可能性的驾驶行为估计时,并没有使用额外的外界信息。例如这些所使用到的离散状态,直行、转弯等在高速路上以及在城市道路上是类似的。但如果将用于评估驾驶员在很少会碰到十字路口场景的状态,挪用到满是交叉口的城区环境进行相应的估计时是不合适的。更重要的是,一个完备且高鲁棒性的驾驶员行为估计系统应该能够充分地利用外部信息,以更好地针对车辆长期驾驶行为序列进行估计。比如当车辆行驶在高速路上时,“左转弯”状态应该被删去;在城市道路上行驶时,就不可能有“离开闸道”这一行为。囊括更高层级的环境信息,能够在自动驾驶车辆行驶在不同工况下的决策过程中提供更有价值的参考依据。
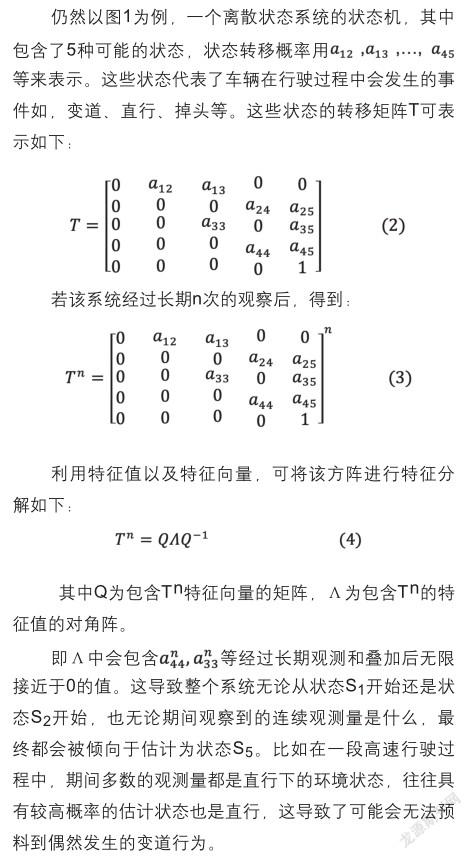
上节内容总结了由于长期的连续观测带来的某些离散状态概率缩减,以及没有将更多有用的外部信息纳入混合决策系统的评估体系这两个主要缺点带来的无法应对长期行为估计的问题。这些问题可以通过自动化地限制输入的连续观测序列的长度,以及为系统提供更全面的信息输入等手段来解决。本节中提出了一种能够根据当前行驶环境自动调整混合决策系统中离散状态模块中状态种类和数量的方法。每次状态的增删,都伴随着相应的状态机的调整,过程如图3所示。
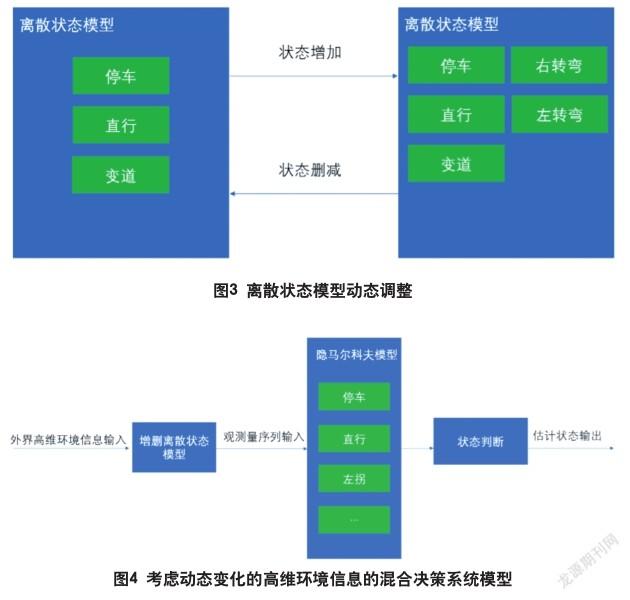
这些状态的增删由额外输入的外部环境信息的变化引起。在不同的环境下,同样的观测输入会导致不同的行为状态。例如观察到车辆在十字路口处的最左侧车道处打了左转灯,他可能的行为是准备在该路口左转弯或者调头;若是观察到一辆在高速路上中间车道的车辆打起了左转灯,则其对应的行为应该是向左变道。在本文中,将这些会影响驾驶行为状态估计的外界高维信息归纳为以下两类:道路种类(如城市道路、城市路口、高速道路、高速闸道口等)和环境条件(雨天、晴天、夜晚等)。于是原先图2中所示的系统工作流就会如图4所示,在初始时多出一步:根据当前的外部高维环境信息来决定目前隐马尔科夫模型需要关注的离散状态量。
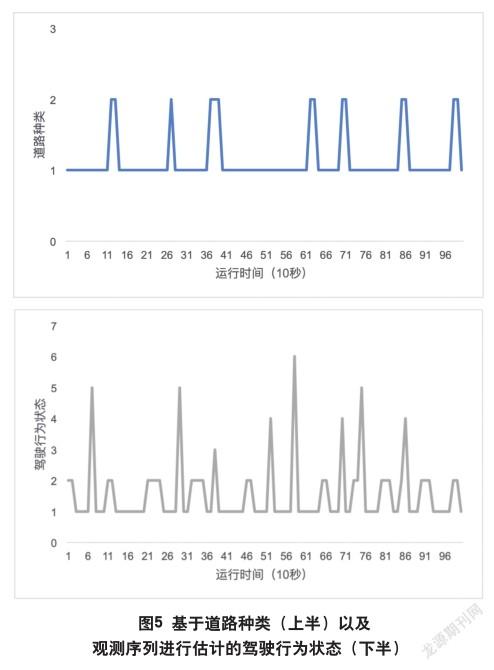
任何外界环境的变化,都会及时引起系统策略的动态调整,针对驾驶行为的估计也会更加地准确。而这些外界环境的高维信息可以通过GPS定位、V2X以及先进的感知算法获得。图5是在实际城市道路中收集到的由人类司机驾驶的车辆的状态信息进行驾驶行为估计的结果。
其中道路种类1、2、3分别代表城市道路、城市路口以及高速路段。驾驶行为状态1、2、3、4、5、6分别代表直行、停车、左转、右转、左变道、右变道。其中估计的驾驶行为状态与实车路试过程中采集到的目标车辆的实际行为基本一致。本实验也证实了本文提出的可根据外界环境信息动态调整的混合决策系统的有效性。
自动驾驶汽车能够彻底改变人们未来交通出行的模式,并解决当下许多和交通运输相关的商业、社会问题。在一个可预见到的人车共驾的混合交通环境下,自动驾驶车辆具备对其他车辆驾驶行为的估计能力是极为重要的。本文提出的混合决策系统通过将外界会影响车辆驾驶行为的更高维丰富的环境信息纳入考量,并动态地调整更新离散的车辆状态,使自动驾驶车辆具备模仿人类司机面对复杂动态环境的决策能力。在未来的研究中,会继續关注对车辆驾驶风格识别的探索上,进一步加强车辆的驾驶行为估计能力。也希望尝试将本决策系统扩展到具备车辆导航规划的能力。
作者单位:广州市第三脑人工智能芯片研究院
猜你喜欢
军事文摘(2023年18期)2023-11-03 09:45:42
纺织科学研究(2021年9期)2021-10-14 08:52:10
有色金属(矿山部分)(2021年4期)2021-08-30 06:10:34
资源导刊(信息化测绘)(2020年5期)2020-06-22 08:37:00
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:34
测绘科学与工程(2017年1期)2017-05-04 03:40:44
太空探索(2016年7期)2016-07-10 12:10:15
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:30
太空探索(2015年8期)2015-07-18 11:04:44
河南科技(2014年11期)2014-02-27 14:10:11