基于点到面度量的多视角点云配准方法
2022-06-10 06:30:56马洁莹田暄翟庆王丞
西安交通大学学报 2022年6期
点云配准是计算机视觉
、图像识别
、机器人
等领域的一个基本问题。点扫描设备的发展使得重建三维物体模型或场景模型成为可能,但由于物体自遮挡或视角的限制,通常不能一次性获取到物体或场景的全部信息,需要使用点云配准方法将多个视角采集到的点云数据统一到一个参考系中,从而实现三维物体或场景模型的重构。根据所涉及点云的数量,可将配准问题分为双视角配准和多视角配准两个子问题。
目前,已经有多种用于解决双视角配准问题的方法,其中最为经典的是Besl等
提出的迭代最近点(ICP)算法,它可以实现成对点云的高效配准。但是,该方法不能处理非重叠点云,且当迭代次数增加时,会产生局部收敛问题。为此,Chetverikov等
提出了裁剪迭代最近点方法以解决不重叠点云之间的配准问题,该方法引入重叠百分比,自动裁剪点云非重叠区域,减少非重叠区域对配准精度的影响。对于含有噪声的点集,Magnusson等
提出了3D-NDT方法,将目标点集所占据的三维空间细分为正则化单元,用正态分布模拟数据点的概率,具有一定的鲁棒性。除此之外,Bouaziz等
提出了稀疏最近点迭代方法,该方法使用
范数代替传统的
范数,以减少离群值对配准的影响。为解决局部收敛问题,Shi等
将点云滤波方法与裁剪ICP方法相结合来进行点云之间的配准。与此同时,许多基于点特征的方法
也被提出为配准提供良好的初值。但是,ICP方法还存在收敛速度慢的缺点,为此Pavlov等
基于安德森加速的思想提出了AAICP方法,Zhang J.等
在此基础上加入威尔斯函数进一步提高了ICP的收敛速度。
方位向间歇采样散射波是对传统散射波干扰的改进,其原理是:干扰机对截获到的SAR脉冲信号进行周期性地全脉冲采样(如图2),然后转发至特定散射区域,干扰信号经散射后被SAR接收.忽略干扰机转发延时,设未经方位向间歇采样的传统散射波信号形式为
在实际应用中,用于配准的数据点往往取自几何表面,使用点到点误差度量的目标函数即使已收敛也不可能获得单个点的精确重叠,这将在一定程度上导致点云的配准误差。为此Chen等
提出了点到面误差度量的迭代最近点方法。点到平面度量通常使用标准非线性最小二乘法来求解,非常耗时。Rusinkiewicz等
研究发现,当两个输入面之间相对旋转较小时,可以将非线性最小二乘问题近似为线性最小二乘优化问题进行求解。基于这一论断,Low
推导了使用点到面ICP方法的线性求解方法。Park等
在原始能量项的基础上增加了一个对应点之间的颜色约束,Rusinkiewicz
进行了另一种改进,该方法考虑了对应点对中两个点的法线,并提出了对称目标函数,在光滑模型或包含一定噪声的情况下具有更良好的表现。
相对于双视角配准,多视角配准问题涉及的点云数量更多,配准的复杂程度也更大。对于多视角配准,较为简单直接的是校准-积分方法
,该方法对两个点集进行配准及合并,直到所有的点集统一到一个模型中。之后,Bergevin等
提出用星网来组织所有点集,依次将点集置于星网中心,计算该帧点云与其他各帧点云的刚性变换参数。然而,使用以上两种方法对点云进行顺序配准,将不可避免地会出现累积误差的问题。为此,徐思雨等
提出了逐步求精策略,通过双视角配准方法不断对粗糙模型进行修正,解决了累积误差的问题,最终实现了多视角点云的匹配。
为避免顺序估计,Gojcic等
提出了第一个端到端、数据驱动的多视角点云配准方法,直接以全局的方式配准所有点云。基于
-means的点云配准方法
将配准问题转化为聚类问题,在全局坐标系下进行聚类操作来实现多视角点云之间的匹配。Mateo等
引入贝叶斯框架,根据不同视角对应关系的可靠性对其附加不同权重,降低了不正确对应关系给配准问题带来的误差,但累积误差的问题仍然存在。与此同时,基于概率的方法不断涌现。许多学者利用高斯混合模型
来拟合数据分布,通过概率模型利用期望最大化方法生成数据点,最终得到多视角匹配结果。然而,对于一组包含较长尾或非典型观测到的数据集,使用StMM
来代替GMM将获得更稳健的配准结果。
随着研究的不断深入,基于相对运动的方法不断涌现,Govindu等
提出了运动平均方法,将两个点云之间的相对运动视为一组约束方程,从多个相对运动中估计多视角配准结果。与此同时,Arrigoni等
将低秩稀疏矩阵分解引入配准问题中,通过矩阵分解来从一组可靠的相对运动估计全局运动,该方法相对于运动平均方法具有更强的鲁棒性。为加快求解速度,Zhang X.等
在此基础上增加了一个角度约束,利用增广拉格朗日乘子进行求解,加快了运行时间,然而此类方法对近似矩阵非0元素的数量具有一定的要求。
时至今日,点云配准仍是一个有待深入探索的问题。点到平面误差度量的方法对于三维曲面的精细化配准非常精确,已广泛用于双视角配准方面,在多视角配准问题方面却鲜有使用。为此,本文提出了一种基于点到面误差度量的多视角配准方法,该方法根据初值构造物体粗糙模型,将点云逐帧与不完整模型进行匹配,在每帧点云的迭代过程中,提出高效的法向量转换策略以降低方法时间复杂度,并使用线性最小二乘法求解点云的配准参数,配准结果用以修正物体的粗糙模型与法向量集。通过交替进行点到面双视角配准和修正模型参数,该方法可实现高精度的多视角点云配准。
对照组(n=50)生活方式改善36例(72.00%)、自我血糖监测34例(68.00%)、血糖控制 26例(52.00%);观察组(n=50)生活方式改善47例(94.00%)、自我血糖监测 42例(84.00%)、血糖控制 45例(90.00%);两组患者生活方式改善、自我血糖监测、血糖控制相比,观察组明显优于对照组,差异有统计学意义(P<0.05)。
1 迭代最近点算法

根据式(15)建立两帧待配准点云之间的点对关系

(1)
式中:(
,
()
)是数据点云与模型点云之间的对应点对;
和
分别表示作用于数据点集的旋转矩阵和平移向量。在理想情况下,对应点对中的两个点完全重叠时,即可完成两帧点云的正确匹配。从式(1)中可以看出,该算法旨在获取合适的点对关系以及旋转和平移变换,使得目标函数最小,从而得到较精确的点云配准结果。
给定点集的初始配准参数(
,
),该算法需要迭代执行以下两个步骤。
假设物体的精确模型
已知,依次将每帧点云作为数据点云与模型
通过ICP算法进行配准,可得到多视角配准结果。由于基准帧点云的位置是准确的,所以从第二帧点云开始与精确模型进行匹配。由此,基于点到面的多视角配准方法可简化为最小二乘问题

(2)
根据当前建立的点对关系,通过最小化所有对应点之间的点对距离更新刚体变换

(3)
重复以上步骤,直至迭代数
超出预先设定的阈值
或刚体变换矩阵无明显变化时,停止迭代,输出刚体配准结果。
(
,
,
,
,
,
)
(
)
(
)
(
)
2 基于点到面度量的点云配准方法

对于数据点云中的每个点,在模型点云中搜索最近点,建立两帧待配准点云之间的点对关系

(4)
式中(
,
,
(,)
)表示第
帧点云中数据点
,
与在模型
中搜寻得到的最近点
(,)
组成的对应点对。
式(4)采用点到点度量的ICP算法进行配准,然而ICP算法存在两个缺陷:①该算法假设所有点在模型点集中都存在对应点,数据点云或模型点云存在的缺失部分将给算法的精度和收敛性带来一定影响;②由于点云大多取自物体表面,点到点ICP算法并未考虑曲面的局部几何结构,由此导致无法获取单个点的精确重叠。考虑到这两个因素,本文提出目标函数

(5)
式中:
,
表示一个二值变量,当
,
与模型点集中的对应点
(,)
之间距离低于设定阈值时,
,
取1,否则取0;
(,)
表示
(,)
附近平面的法向量。该目标函数通过设置二值变量
,
来降低非重叠区域对配准的影响,通过最小化数据点与对应点处切平面的距离来实现配准,以减少物体表面离散化对配准的影响,如图1所示。




(6)
对第
帧点云进行配准时,要去除粗糙模型中的该帧点云数据,从而得到不完整模型
矿区内共发现19条煤脉,其中主要煤脉7条,次要煤脉12条。它们均产于河沥溪组地层的断裂破碎带中,其产状和形状,严格地受断裂构造所控制,酷似热液贯入的金属矿脉。常明显切穿地层层理,而与断层面的产状相吻合,并随相应断裂带的产状变化而变化。因其倾角较陡(>60°),可称之为“立槽型”煤脉。

(7)
会计故意性信息失真是指会计活动当事人(包括国有企事业、非公有制企业、上市公司、中介服务机构)出于各种目的,利用会计规范给会计活动当事人的灵活性,事先经过周密安排而从主观上故意有偏向性或诱导性的提供信息或者违背会计规范,制造假账,而造成的信息失真。[1]会计故意性信息失真分为二类:第一类如银广厦、琼民源的财务报告完全是无中生有、恶意编造,违背社会道德和法律;第二类是利用内外串通,共同操纵、利用信息不对称和财务技能的优势共同作弊。
Do while
在进行多视角配准时,需要考虑一个问题,即在双视角配准过程中,模型点集是不发生改变的,但是多视角问题中用以配准的模型点集将随点云的修正而不断发生变化。若每进行一帧点云的配准都需求解不完整模型
中每个点平面处的法向量,将不可避免地造成方法的计算复杂度升高。为此,本文提出了一个有效的法向量转换策略来降低方法的运行时间。
2.1 法向量求解策略
对于点云数据中的一个点
,
(
,
,
),可以用特征值和法线两种信息描述它的局部几何结构。给定一个支持半径
,对于该半径内的任意一点
,
(
,
,
),可建立一个3×3的协方差矩阵
,

(8)
式中:
=1,2,3,…;
=[
-
,
-
,
-
]
;
,
={
,,
|‖
,,
-
,
‖≤
}代表支持半径
内所有点的集合。在实验中,通常会设置一个数量阈值,如果该半径内点数小于数量阈值,则进行过滤,以此来降低离群值的影响。
对矩阵
,
进行奇异值分解(SVD),将得到3个特征值
,,1
>
,,2
>
,,3
以及特征值对应的特征向量
,,1
、
,,2
、
,,3
。通常情况下,当支持半径较小时,以点
,
为圆心、半径为
范围内所包含的点可近似视为位于同一平面上。在较大特征值
,,1
以及
,,2
对应的特征向量方向上,数据点分布较为离散,而数据点在
,,3
方向上则较为稳定。因此,可将数据点周围点计算所得较小特征值对应的特征向量
,,3
(当指向视点反方向时取-
,,3
)视为该点附近平面的法向量
,
,用以描述该点的局部几何结构。

(9)


(10)
2.2 基于点到面度量的迭代最近点方法
从图2可以看出,多视角点云配准方法的关键在于单帧点云
与粗糙模型
之间的双视角配准问题,点云
的刚体变换参数(
,
)可以通过求解如下目标函数后得到

(11)
为估计点云的刚性变换关系,可将配准参数记为一个4×4的刚性变换矩阵
由图8可知,随着发酵时间的增加黄精酸奶的稠度先上升后下降,从5 h到7 h变化较显著,当发酵时间为7 h时黄精酸奶稠度最高;而黄精酸奶坚实度随着发酵时间的增加变化不明显,呈现先上升后下降的趋势,在7 h发酵时间时坚实度的测量值最大,因此根据质构分析选择发酵7 h较适宜。
=
(
,
,
,
,
,
)
(
,
,
)=
ICP算法可以有效地求解对应点云的配准问题,但它不能直接用于具有非重叠区域的点云之间的配准,这是因为位于非重叠区域的数据点在模型点集中不存在真正的对应点,如果将这些不正确的匹配也用于点云匹配中,将难以获得精确的配准结果。此外,在实际应用中,用于配准的数据点取自物体的几何表面,采用点到点误差度量的目标函数即使已收敛也不可能获得单个点的精确重叠,这将导致配准的误差。
(12)
式中
(
)、
(
)、
(
)分别指围绕
轴、
轴、
轴旋转相应的角度
、
、
。
目标函数式(11)本质上是一个最小二乘优化问题,只需确定
、
、
、
,
、
,
、
,
这6个参数,即可完成该问题的优化求解。然而,由于
、
和
是旋转矩阵
中的非线性三角函数参数,不能简单地通过线性最小二乘技术求解,复杂度较高。当两个输入面之间的相对方向变化很小时,可以用线性最小二乘逼近非线性优化问题。
陡河水库经震后修复及提高保坝标准建设,大坝加高3m,坝体向下游培厚16m,在提高可液化砂层的埋藏深度的同时,有利于加速轻壤土的排水固结,增加土壤密实度,提高砂土的抗液化能力,从而提高其抗震能力。
当
≈0°时,可以使用近似值sin
≈
以及cos
≈1。在方法每次迭代更新矩阵
时,
的相对方向变化很小,因此可以将
重新表示为

(13)


(14)
2.3 方法实现

在双视角配准问题中,最常用且有效的算法就是ICP算法。给定某物体的数据点云
与模型点云
,基于点到点距离度量的迭代最近点方法的目标函数可表述为
VL 3 DUO 集近年来的技术创新成果于一体,包含了自动上下料系统、TrackMotion 自动化系统以及机床的模块化基本结构,在19.6 m2的紧凑空间内可实现生产效率的最大化。在该条变速器齿轮生产线中,VL 3 DUO所拥有的专用于OP 10和OP 20的两个独立加工区,分别车削工件的两个面。VL 4 H则同时进行工件的滚齿加工,通过集成的自动上下料主轴进行工件的上下料,极大降低了辅助时间。两台模块化机床通过TrackMotion 自动化系统进行联机,轻松实现了变速器齿轮的成套自动化加工。

(15)
将点对基于距离从小到大进行排序。
通过最小化加权点对距离得到重叠百分比
以及裁剪后的点云


(16)
根据步骤2中建立的点对关系,最小化目标函数式(11)更新刚体变换参数(
,
)
(17)
综合本小节分析可知,本文方法在准确性和效率上都有很好的表现。

(18)
迭代执行以上3个步骤,当迭代次数
达到预先设定的阈值
或刚体变换矩阵无明显变化时,即可输出刚体配准参数。
3.3.1 海马组织DG区病理检测结果 光镜下观察小鼠海马DG区神经元,对照组神经元呈颗粒状,细胞排列整齐有序,胞体饱满,间隙正常,边缘结构清晰。与对照组比较,乳腺癌组神经元未见明显异常;抑郁症组细胞出现萎缩,有一定程度的核深染,而BCRD组神经元出现胞浆浓缩,细胞核体积变小或者消失,核深染程度加重,甚至出现破裂状态。结果见图3。
式(15)是搜索最近点问题,可以使用基于
-d树
的搜索方法解决,该方法会直接得到对应点对的索引以及点对距离。可根据式(16)得到重叠百分比以及裁剪后的数据点云。在求解目标函数式(17)时,
(,)
和
(,)
具有相同的索引,在获得点的对应关系后,将直接得到该点处平面的法向量,用以最小化该帧点云与不完整模型的点到平面误差。
2.2 量表的项目分析结果 项目分析中,条目A8和条目A13与总分相关系数<0.4,CR<3,题项删除后Cronbach′s α系数不减反增,共同性值<0.20(此时因素负荷量<0.45),因而经项目分析综合评鉴后,予以删除[11]。量表剩余19条目。见表3。
基于点到面的多视角配准方法伪代码如下。


原来生活中、学习上、运动方面,学生的表现都出乎我们意料的好,而不像某些报刊媒体故意宣传的“00后”的那些标签化。由此可见,我们评价学生不能单一标准化论之。即使不能完全融入学生生活,走进他们内心,也可以借助一些方式多侧面、多角度地了解学生的优点,给予他们信心和尊重。
根据式(8)计算数据点处平面法向量;
根据式(6)构造粗糙模型;
Do while
=
+1;
for
=2:

利用
建立
-d树;
为求解目标函数,本文采用如图2所示的逐步求精策略,有效地将多视角配准问题划分成若干个双视角配准子问题。图中,
表示第
帧点云在当前坐标系下的点集,绿色箭头代表双视角匹配。利用初值构造粗糙模型,依次遍历除基准帧以外的每帧点云,使其与去除该帧点云后的不完整粗糙模型进行双视角配准,得到该帧点云的配准参数,用以修正粗糙模型。依次遍历完所有点云后,还需进行多次迭代,最终得到多视角点云的配准结果。
=
+1;
根据式(15)建立点对关系(
,
,
(,)
);
根据式(16)对点云进行裁剪;



end for
Until
<100或配准误差小于设定值
2.4 复杂度分析


3 实验结果
为验证本文多视角配准方法的性能,将该方法在斯坦福大学图形实验室公开的4个数据集(Armadillo、Bunny、Buddha、Dragon)
上进行了测试,并与当下较为流行的方法进行了对比。这些数据集都是从一个对象的不同视角中得到的,并且点云之间的变换只有刚性变换。为更加准确地配准,将数据点的坐标值放大1 000倍。Armadillo、Bunny、Buddha、Dragon数据集的点云帧数分别为12、10、15、15,点总数分别为307 625、362 272、1 099 005、469 193。为减少配准时间,所有的数据集都被均匀地降采样到大约2 000点。
以旋转矩阵误差和平移向量误差评估实验效果。旋转误差和平移误差分别定义为

(19)
式中{
g,
,
g,
}和{
m,
,
m,
}分别表示第
个刚体变换的实际真值和估计真值。
展现分享:鼓励学生主动介绍课前预习的相关成果,进行课题演示、分享个人观点,激发学生的学习热情,变被动学习为主动学习。教师在这个过程中重点听取和记录学生在预习中理解不透的知识点和疑问。
所有的测试方法均在Matlab R2021a实现,并且都使用
-d树
方法搜索最近点。实验在一台16 GB内存、6核3.10 GHz的计算机上进行。
3.1 双视角配准
由于本文提出多视角方法在很大程度上取决于双视角配准方法的运算性能,因此有必要对双视角配准方法的效率、精度、收敛性等情况进行进一步的说明。为此,将本文逐步求精策略使用的双视角配准方法与使用安德森加速的ICP方法(AAICP)
、稀疏ICP方法(SpICP)
以及裁剪ICP方法(TrICP)
进行了效率和精度方面的比较。用于双视角配准的数据为每组数据集的前两帧点云。
建筑行业是一种高耗能的生产领域,年均能耗达到了全世界产业总能耗的40%左右,2012年,我国财政部和住建部联合发布了《关于加快推动我国绿色建筑发展的实施意见》,提出了应在建筑行业中大范围的使用建筑保温材料等绿色环保材料,通过这一举措,将会为高分子材料在建筑行业的发展带来新的机会。
“创客”源自英文单词“Maker”,由著名作家科利·多克托罗在《Maker》一书中提出的。2015年的两会上,“创客”首次在政府工作报告中提出,并受到了社会的广泛关注。结合许多学者对于创客的定义,笔者认为:创客是具有较强动手实践能力,能够借助一定的工具将自身想法转变成现实的个体,其中,使用的工具可以是有形或无形的。
3.1.1 精度与效率
给定相应的初始参数,在不同数据集上使用4种方法进行配准,结果如表2所示。可以看出,本文采用的双视角配准方法在精度方面具有较大的优势,在Bunny、Buddha、Dragon数据集上总能实现最精确的配准,在Armadillo数据集上,效果和SpICP不相上下,但是效率远高于SpICP。这是因为在实际应用中,用于配准的数据点往往取自几何表面,物体表面的不同离散化导致了其他3种方法的配准误差。但是,SpICP方法将配准问题表示为稀疏优化,降低了对异常值和缺失数据的敏感性。虽然配准效果有了一定的提升,但始终存在点对不能精确重叠的弊端。

在效率方面,不同双视角配准方法的运行时间对比如图3所示,图中每个数据集的100%运行时间分别对应0.510 2、0.872 4、0.540 9、0.470 5 s。可以看出,本文使用的双视角方法运行速度最快。

对于本文的双视角配准方法,除了主程序迭代耗时之外,还要考虑方法运行前的法向量计算耗时。Armadillo、Bunny、Buddha、Dragon这4个不同数据集下的法向量计算耗时分别为0.064 4、0.063 8、0.068 6、0.065 5 s。可以看出,当数据集中点的数量一定时,计方法向量的时间大致相同,尽管如此,本文方法的运行时间仍远少于SpICP方法。
式中
3.1.2 收敛性
为验证本文双视角配准方法的收敛性,将本文方法与其他3种方法在Bunny数据集上进行了测试,结果如图4所示。分析结果可知,本文方法的收敛速度相对于其他3种方法中收敛最快的SpICP方法提高了30%。


从图4可知:点到面度量方法在第5次迭代时已基本收敛;TrICP方法在第18次迭代时开始收敛,优于AAICP和SpICP的收敛速度;本文方法的配准精度明显高于其他3种方法;AAICP基于安德森加速的思想对TrICP进行了加速,收敛速度有所提高。SpICP方法将配准问题表示为稀疏优化,降低了对异常值和缺失数据的敏感性,配准效果有了一定的提升,但始终存在点对不能精确重叠的弊端。本文提出的配准方法用最小化点沿目标曲面法线的误差来代替TrICP方法中的最小化点对距离步骤,考虑了目标点云的局部几何结构,配准精度高且不易陷入局部最优,因此可以获得更为精确、快速的点云匹配结果。由此可见,使用点到面误差度量的配准方法可以快速实现两帧点云之间的高精度配准。
3.2 多视角配准
为验证本文多视角配准方法的有效性,将本文方法与基于
-means的方法
(后文简称
-means)、使用TrICP的运动平均方法(MATrICP)
、正态分布变换方法(NDT)
以及逐步求精的多视角配准方法(Con2Fin)
这4种较为先进的方法进行比较。
3.2.1 精度与效率
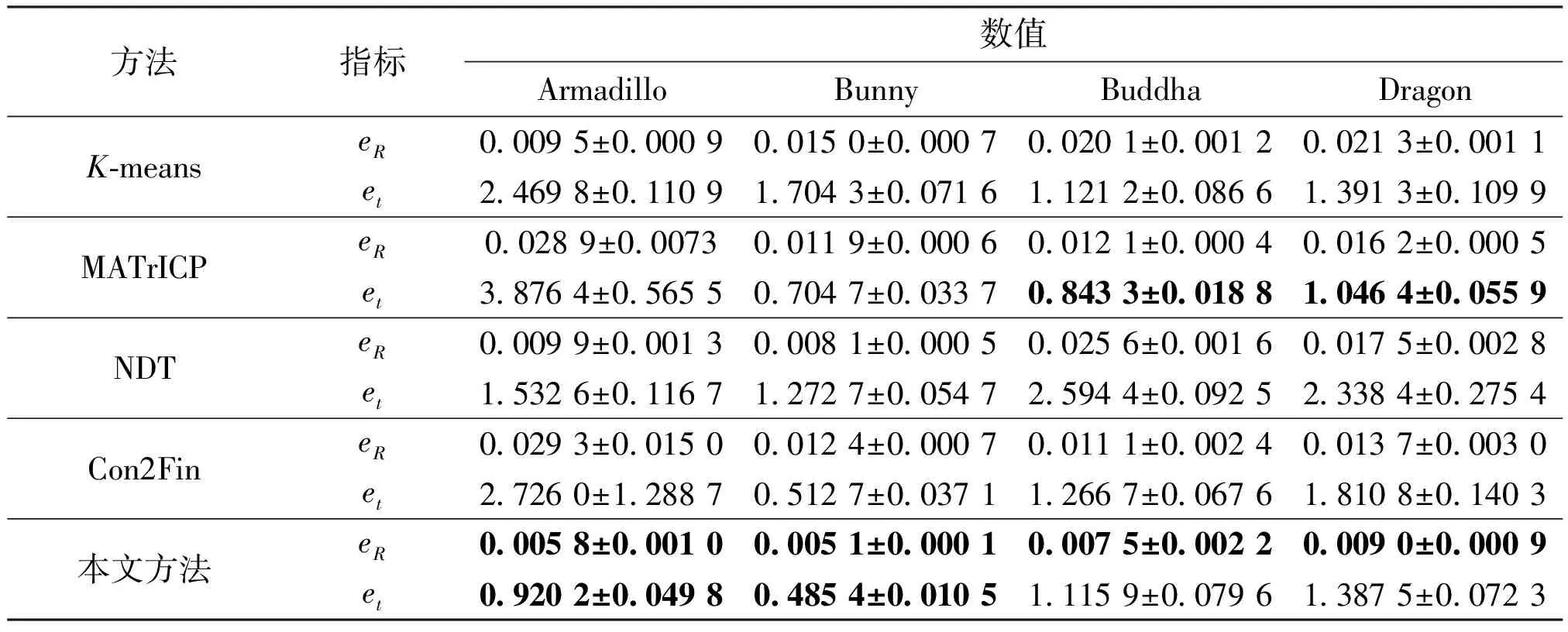
表3展示了不同方法在4个数据集上进行匹配的结果。为了更加直观地查看对比结果,图5以截面的形式展示了所有多视角配准的结果。从表3可以看出:对于Armadillo和Bunny数据集,本文方法总能获得较为精确的配准结果;对于Buddha和Dragon数据集,本文方法可以有效获得高精度的旋转矩阵,平移向量误差相对较大。这是因为本文采用的点到平面误差度量方法通过最小化数据点与其对应点处切平面之间的平方距离之和来实现点云之间的匹配,通过不惩罚数据点沿曲面的偏移来解决离散化问题,在获取精确旋转变换的同时导致了一定的平移误差。尽管如此,本文方法的配准结果都优于
-means、NDT和Con2Fin的配准结果。


在效率方面,不同方法在不同数据集上的运行时间如表4所示。可以看出,除NDT方法外,4种方法运行效率相当。

为实现多视角配准,基于
-means的方法依次遍历每个点集,然后交替进行聚类和刚性变换估计。在聚类操作中,该方法将数据点划分为预设定的聚类数,利用聚类的质心表示该聚类中所有的数据点,这将不可避免地造成信息的丢失,尽管非常有效,但由于信息丢失,配准精度较低。MATrICP方法从成对配准估计的一组相对运动中得到所有全局运动,但该方法对不可靠的相对运动很敏感,即使是一个不可靠的相对运动也会导致多视角配准的失败。如表3所示,对于Armadillo数据集,由于输入了不可靠的相对运动,所以该方法并未能成功获得配准结果。NDT方法将目标点集细分为正则化单元,并通过正态分布建模以估计数据点属于这个单元的概率,然而在实际应用中,数据点分布不均匀从而导致大部分稀疏数据点无法得到利用,因此NDT方法难以获得预期的结果。Con2Fin方法采用传统的TrICP方法来处理双帧点云的配准问题,如3.1小节所述,该方法精度上比不上本文提出的配准方法。
本文提出的多视角配准方法通过逐步求精的策略将多视角配准问题分解成多个双视角配准问题来进行求解,每次程序主体运行之前,在进行求解法向量的同时对离群点的进行过滤。在进行单帧点云的每次迭代过程中,该方法基于点对距离对点云进行了裁剪,排除掉非重叠区域对配准的影响。在估计刚性变换阶段,通过最小化点沿目曲面法线的误差,代替最小化点对距离来获取更为精确的配准结果。通过多次迭代,该方法可以获得更为准确的多视角配准结果。
3.2.2 鲁棒性
为了说明鲁棒性,将5种方法在较低高斯噪声(SNR=50 dB)和较高高斯噪声(SNR=25 dB)环境中进行了测试。为消除随机性,每组实验都进行30次独立实验,结果如表5和表6所示,表中数据以“平均值±标准差”形式展示。

从表5和表6可以看出,配准精度随着噪声的增加而递减。在相同的噪声水平下,对于Armadillo和Bunny数据集,所提方法总能得到最佳的配准结果。对于Buddha和Dragon数据集,所提方法可以得到较好的旋转矩阵,但配准的平移向量误差较大,但优于
-means、NDT和Con2Fin的效果。
对于带有噪声的数据集,基于
-means的方法利用点的聚类来实现多视角配准,噪声会影响聚类效果,配准结果也会因此受到影响。MATrICP方法从一系列相对运动中得到配准结果,虽然噪声的增加会降低配准的精度,但运动平均方法可以消除噪声对配准的影响,具有较高的鲁棒性,因此该方法的配准结果较为稳定。但是,增加的噪声可能会导致不可靠的相对运动,从而导致一些不理想的配准结果。NDT方法使用一个NDT来表示每个划分的单元中的数据点,不易受到噪声的影响,具有一定的鲁棒性,但该方法始终存在固定划分导致数据点信息丢失的问题,因此配准结果精度差,稳定性低。Con2Fin方法在进行双视角配准子问题的求解过程中并未考虑噪声的影响,在较高噪声的情况下,鲁棒性较差。本文方法在求解目标点平面法向量时,对离群值进行了过滤,同时采用逐步求精的策略逐步修正配准参数,通过多次迭代,最终获得了较为准确的配准结果,具有较高的鲁棒性。
3.2.3 三维场景重建
为验证本文多视角配准方法的实际应用能力,在EXBI数据集
上进行了测试。该数据集包含由KiNect传感器记录的10个RGB-D扫描,任意两帧点集都包含高重叠百分比。对于场景重建,所有方法都只处理距离信息,颜色信息用以辅助最终评估。在给定初始刚性变换的情况下,利用各种配准方法实现多视角匹配,得到三维重建结果,如图6所示。可以看出,本文方法在所有对比方法中获得了最准确的场景重建结果。
为实现三维点云配准,基于
-means的方法通过聚类来实现点云之间的匹配,该方法运行效率高,但由于聚类会导致信息缺失,造成该方法配准精度不高。MATrICP方法在一组相对运动中得到全局运动,由于EXBI数据集的重叠百分比很高,包含更多可靠的相对运动,因此该方法可以获得较为准确的配准结果。NDT方法用正态分布拟合目标点集的每一个小单元,但由于不均衡的分割,存在较多无效NDT,配准精度不高。Con2Fin方法通过TrICP来依次进行点云之间的匹配,配准精度较高,多次迭代后可以得到较为精确的配准结果。本文方法通过最小化点对之间的点到切面误差来降低曲面离散化对配准的影响,并通过逐步求精的策略对配准参数进行修正,配准效果较好。由于原始数据存在噪声,所以本文对重建结果进行了去噪处理,结果如图6(h)所示。
综合本小节分析可知,本文方法可应用于三维重建。
4 结 论
本文提出了一种基于点到面误差度量的多视角点云配准方法。该方法将粗糙模型近似为精确模型,将点云逐帧与粗糙模型进行配准,在每次迭代过程中使用点到面度量的双视角配准方法,配准结果用于修正物体的粗糙模型,通过迭代执行双视角配准和模型修正,最终实现多视角点云配准。在公开数据集上的实验结果表明,本文方法可以有效实现多视角点云的精确配准,在三维重建方面有一定的前景。后续研究将继续关注该方法的现实应用,以期待开发出较为完备的三维场景重建系统,用以满足机器人制图、医学影像处理等实际需求。



:
[1] SUN Jing, SUN Zhanli, LAM K M, et al. A robust point set registration approach with multiple effective constraints [J]. IEEE Transactions on Industrial Electronics, 2020, 67(12): 10931-10941.
[2] 林伟, 孙殿柱, 李延瑞, 等. 形貌约束的多视角点云分阶配准方法 [J]. 西安交通大学学报, 2020, 54(6): 75-81.
LIN Wei, SUN Dianzhu, LI Yanrui, et al. A hierarchical registration method of multiview point clouds with shape constraints [J]. Journal of Xi’an Jiaotong University, 2020, 54(6): 75-81.
[3] PAVAN N L, DOS SANTOS D R, KHOSHELHAM K. Global registration of terrestrial laser scanner point clouds using plane-to-plane correspondences [J]. Remote Sensing, 2020, 12(7): 1127.
[4] FANG Bin, MA Jie, AN Pei, et al. Multi-level height maps-based registration method for sparse LiDAR point clouds in an urban scene [J]. Applied Optics, 2021, 60(14): 4154-4164.
[5] LIN Zhiyang, ZHU Jihua, JIANG Zutao, et al. Merging grid maps in diverse resolutions by the context-based descriptor [J]. ACM Transactions on Internet Technology, 2021, 21(4): 91.
[6] 陆世东, 涂美义, 罗小勇, 等. 基于图优化理论和GNSS激光SLAM位姿优化算法 [J]. 激光与光电子学进展, 2020, 57(8): 208-217.
LU Shidong, TU Meiyi, LUO Xiaoyong, et al. Laser SLAM pose optimization algorithm based on graph optimization theory and GNSS [J]. Laser & Optoelectronics Progress, 2020, 57(8): 208-217.
[7] BESL P J, MCKAY N D. A method for registration of 3-D shapes [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256.
[8] CHETVERIKOV D, SVIRKO D, STEPANOV D, et al. The trimmed iterative closest point algorithm [C]∥2002 International Conference on Pattern Recognition. Piscataway, NJ, USA: IEEE, 2002: 545-548.
[9] MAGNUSSON M, LILIENTHAL A, DUCKETT T. Scan registration for autonomous mining vehicles using 3D-NDT [J]. Journal of Field Robotics, 2007, 24(10): 803-827.
[10]BOUAZIZ S, TAGLIASACCHI A, PAULY M. Sparse iterative closest point [J]. Computer Graphics Forum, 2013, 32(5): 113-123.
[11]SHI Xiaojing, LIU Tao, HAN Xie. Improved iterative closest point (ICP) 3D point cloud registration algorithm based on point cloud filtering and adaptive fireworks for coarse registration [J]. International Journal of Remote Sensing, 2020, 41(8): 3197-3220.
[12]沈江华, 孙殿柱, 李延瑞, 等. 点云初始配准的优化求解算法 [J]. 西安交通大学学报, 2019, 53(8): 167-174.
SHEN Jianghua, SUN Dianzhu, LI Yanrui, et al. An optimization algorithm for initial registration of point clouds [J]. Journal of Xi’an Jiaotong University, 2019, 53(8): 167-174.
[13]彭真, 吕远健, 渠超, 等. 基于关键点提取与优化迭代最近点的点云配准 [J]. 激光与光电子学进展, 2020, 57(6): 60-71.
PENG Zhen, LV Yuanjian, QU Chao, et al. Accurate registration of 3D point clouds based on keypoint extraction and improved iterative closest point algorithm [J]. Laser & Optoelectronics Progress, 2020, 57(6): 60-71.
[14]PAVLOV A L, OVCHINNIKOV G W, DERBYSHEV D Y, et al. AA-ICP: iterative closest point with Anderson acceleration [C]∥2018 IEEE International Conference on Robotics and Automation (ICRA). Piscataway, NJ, USA: IEEE, 2018: 3407-3412.
[15]ZHANG Juyong, YAO Yuxin, DENG Bailin. Fast and robust iterative closest point [J/OL]. IEEE transactions on Pattern Analysis and Machine Intelligence, 2021[2021-10-01]. https:∥doi.org/10.1109/tpami.2021.3054619.
[16]CHEN Yang, MEDIONI G. Object modelling by registration of multiple range images [J]. Image and Vision Computing, 1992, 10(3): 145-155.
[17]RUSINKIEWICZ S, LEVOY M. Efficient variants of the ICP algorithm [C]∥Proceedings of the Third International Conference on 3-D Digital Imaging and Modeling. Piscataway, NJ, USA: IEEE, 2001: 145-152.
[18]LOW K L. Linear least-squares optimization for point-to-plane ICP surface registration: TR04-004 [R]. Raleigh, NC, USA: University of North Carolina at Chapel Hill, 2004.
[19]PARK J, ZHOU Qianyi, KOLTUN V. Colored point cloud registration revisited [C]∥2017 IEEE International Conference on Computer Vision (ICCV). Piscataway, NJ, USA: IEEE, 2017: 143-152.
[20]RUSINKIEWICZ S. A symmetric objective function for ICP [J]. ACM Transactions on Graphics, 2019, 38(4): 85.
[21]BERGEVIN R, SOUCY M, GAGNON H, et al. Towards a general multi-view registration technique [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1996, 18(5): 540-547.
[22]徐思雨, 祝继华, 田智强, 等. 逐步求精的多视角点云配准方法 [J]. 自动化学报, 2019, 45(8): 1486-1494.
XU Siyu, ZHU Jihua, TIAN Zhiqiang, et al. Stepwise refinement approach for registration of multi-view point sets [J]. Acta Automatica Sinica, 2019, 45(8): 1486-1494.
[23]GOJCIC Z, ZHOU Caifa, WEGNER J D, et al. Learning multiview 3D point cloud registration [C]∥2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway, NJ, USA: IEEE, 2020: 1756-1766.
[24]ZHU Jihua, JIANG Zutao, EVANGELIDIS G D, et al. Efficient registration of multi-view point sets by
-means clustering [J]. Information Sciences, 2019, 488: 205-218.
[25]MATEO X, ORRIOLS X, BINEFA X. Bayesian perspective for the registration of multiple 3D views [J]. Computer Vision and Image Understanding, 2014, 118: 84-96.
[26]ZHU Jihua, GUO Rui, LI Zhongyu, et al. Registration of multi-view point sets under the perspective of expectation-maximization [J]. IEEE Transactions on Image Processing, 2020, 29: 9176-9189.
[27]林桂潮, 唐昀超, 邹湘军, 等. 融合高斯混合模型和点到面距离的点云配准 [J]. 计算机辅助设计与图形学学报, 2018, 30(4): 642-650.
LIN Guichao, TANG Yunchao, ZOU Xiangjun, et al. Point cloud registration algorithm combined Gaussian mixture model and point-to-plane metric [J]. Journal of Computer-Aided Design & Computer Graphics, 2018, 30(4): 642-650.
[28]CHAMROUKHI F. Robust mixture of experts modeling using the
distribution [J]. Neural Networks, 2016, 79: 20-36.
[29]RAVIKUMAR N, GOOYA A, ÇIMEN S, et al. Group-wise similarity registration of point sets using student’s
-mixture model for statistical shape models [J]. Medical Image Analysis, 2018, 44: 156-176.
[30]GOVINDU V M, POOJA A. On averaging multiview relations for 3D scan registration [J]. IEEE transactions on Image Processing, 2014, 23(3): 1289-1302.
[31]ARRIGONI F, ROSSI B, FUSIELLO A. Global registration of 3D point sets via LRS decomposition [C]∥Proceedings of the 2016 European Conference on Computer Vision (ECCV). Cham, Germany: Springer International Publishing, 2016: 489-504.
[32]ZHANG Xin, ZHANG Yan, QU Chengzhi, et al. Fast and robust motion averaging via angle constraints of multi-view range scans [J]. The Journal of Engineering, 2021(2): 104-113.
[33]NUCHTER A, LINGEMANN K, HERTZBERG J. Cached k-d tree search for ICP algorithms [C]∥Sixth International Conference on 3-D Digital Imaging and Modeling (3DIM 2007). Piscataway, NJ, USA: IEEE, 2007: 419-426.
[34]Standford University. The Stanford 3D scanning repository [EB/OL]. (2014-08-19)[2021-10-01]. https:∥graphics.stanford.edu/data/3Dscanrep/.
[35]EVANGELIDIS G D, HORAUD R. Joint alignment of multiple point sets with batch and incremental expectation-maximization [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(6): 1397-1410.
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28 07:02:46
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19 08:28:36
哈尔滨轴承(2020年2期)2020-11-06 09:22:26
今日中国·法文版(2020年7期)2020-07-04 02:53:48
中国特种设备安全(2019年1期)2019-03-13 01:06:26
意林原创版(2016年10期)2016-11-25 10:28:30
高中生学习·高三版(2016年9期)2016-05-14 09:12:05
Coco薇(2016年2期)2016-03-22 02:42:52
山东青年(2016年2期)2016-02-28 14:25:41
新高考·高二数学(2015年11期)2015-12-23 18:17:44