基于双域分解的复杂环境下奶牛监测图像增强算法
2022-06-09 04:38:06刘忠超范灵燕盖晓华
江苏农业科学 2022年9期
关键词:贝叶斯
刘忠超 范灵燕 盖晓华

摘要:针对天气变化及光照不足导致的奶牛监测图像降质问题,提出一种基于双域分解的复杂环境下奶牛图像增强算法。该算法首先采用双域滤波图像去噪,将输入图像分解为低频图像和高频图像;其次根据贝叶斯估计得到不同高频图像的小波阈值,利用改进的Garrote阈值函数进行小波去噪,并结合伽马变换对去噪的高频图像进行矫正,实现对高频图像的滤波和对比度调整;再次通过暗通道先验对低频图像进行去雾,并结合对比度受限自适应直方图均衡化(contrast limited adaptive histogram equalization,CLAHE)算法对去雾后整体偏暗的低频图像进行增强,进一步提高图像的对比度和整体亮度;最后将处理后的高频图像和低频图像进行重构,得到最终的增强图像。以不同时段光照、复杂气象条件下实地拍摄的奶牛场监测图像为样本,采用主观视觉和客观评价将该算法与现有算法进行试验对比。结果表明,该算法能够对复杂光照下奶牛图像有效去噪、增强整体和细节信息、改善图像视觉效果等,相比于HE算法、Retinex算法、CLAHE算法、自适应Retinex算法,标准差分别平均提高1.929 5、4.681 2、3.245 0、0.533 0,峰值信噪比平均分别提高0.526 0、-13.777 5、-0.469 0、1.197 5,信息熵值平均提高0.155 5、0.539 7、0.029 7、0.590 5,结构相似性平均提高0.005 2、-0.082 7、0.058 8、0.046 3,可实现不同时段和复杂气象条件下的奶牛监测图像增强,为基于机器视觉的奶牛行为自动识别奠定良好的基础。
关键词:奶牛监测图像;双域滤波;小波阈值;贝叶斯;伽马变换;暗通道先验
中图分类号:TP391.41;S24 文献标志码: A
文章编号:1002-1302(2022)09-0203-08
近年来,随着智慧畜牧业的不断发展,视频监控和视觉分析技术能够克服接触式传感器监测的弊端,已成为奶牛精准养殖中的一个重要研究热点。通过奶牛监测视频、图像信息的分析学习,可以实现奶牛个体识别[1]、行为识别[2]等。然而,由于奶牛生活环境变化较大,存在诸如夜间、雨天、雾天、光线不足等外界不利条件,监测图像易受到自然环境下不同光照、气象等影响,导致视频图像出现照度不足、光照突变、明暗区、高光部分偏多等问题[3],使其监测图像模糊、整体偏暗、噪声过大、对比度差、光晕现象明显、图像色彩失真等。因此,探究一种适用于奶牛养殖场复杂环境条件的奶牛监测图像增强方法,是目前视频监控技术在奶牛养殖业应用中亟待解决的问题。当前奶牛养殖的自然环境受到天气、光线等影响较大,能够适用于奶牛养殖复杂光照条件下的图像增强算法研究较少。部分学者对于复杂光照条件下的图像增强进行研究并取得了一定进展,1997年Kim首次提出具有亮度保持双直方图均衡(brightness preserving bi-histogram equalization,BBHE)[4],并被江巨浪等应用于动植物图像增强处理[5]。文献[6]所述的直方图均衡化算法,通过先验知识确定其颜色集,进而得到颜色分布直方图,利用差分归一化对大熊猫监测图像进行增强,得到较好的视觉效果。但是这类直方图均衡和改进的直方图均衡算法无法抑制奶牛养殖环境中的雾霾、遮挡等对光散射导致图像模糊的影响,以及光照突变、过曝光等导致的图像噪声较大等缺点。针对以上问题,本研究对奶牛养殖场实地监测采集的图像进行分析,提出一种基于双域分解的复杂环境下奶牛图像增强算法。首先,对奶牛视频图像采用双域滤波图像去噪(dual domain image denoising,DDID)算法分解,获得低频图像和高频图像;其次,通过改进的Garrote小波阈值函数模型和贝叶斯估计的小波收缩阈值方法,对不同照度下的高频图像进行小波去噪,并利用伽马非线性变换函数对小波去噪后的高频图像进行矫正,实现对高频图像的滤波和增强;再次,采用暗通道先验(dark channel prior,DCP)算法对低频图像进行去雾,并根据对比度受限自适应直方图均衡化(CLAHE)算法进行低频图像增强,进一步提高其对比度和整体亮度;最后,将去噪、矫正的高频图像和去雾、增强的低频图像进行重构,使增强后的图像质量更好,更符合视觉效果,便于机器视觉的进一步处理。
1 奶牛监测图像分析
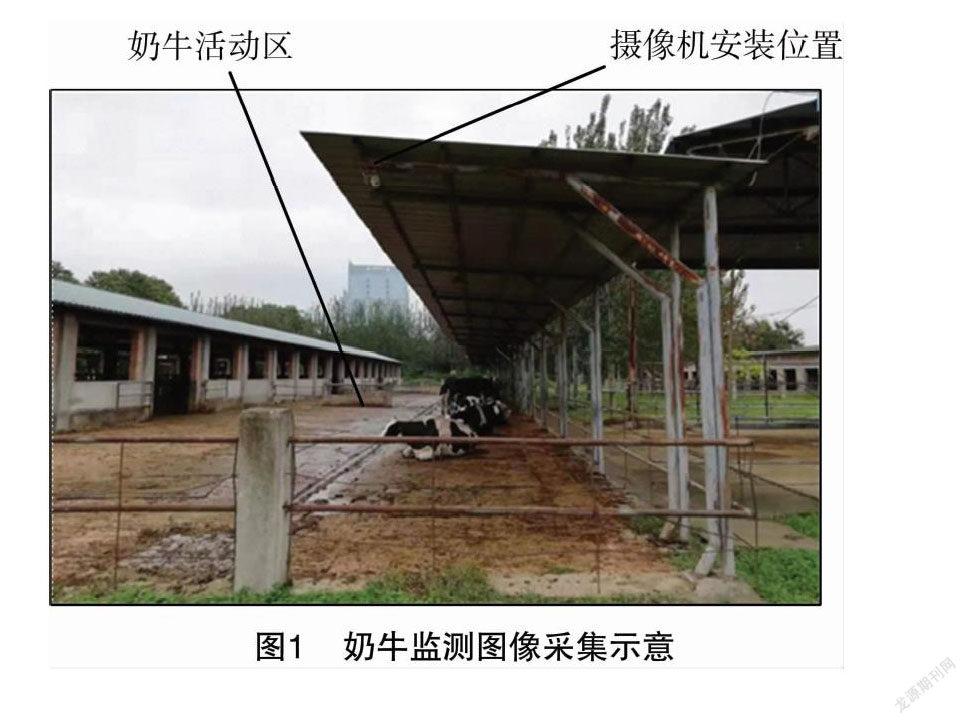
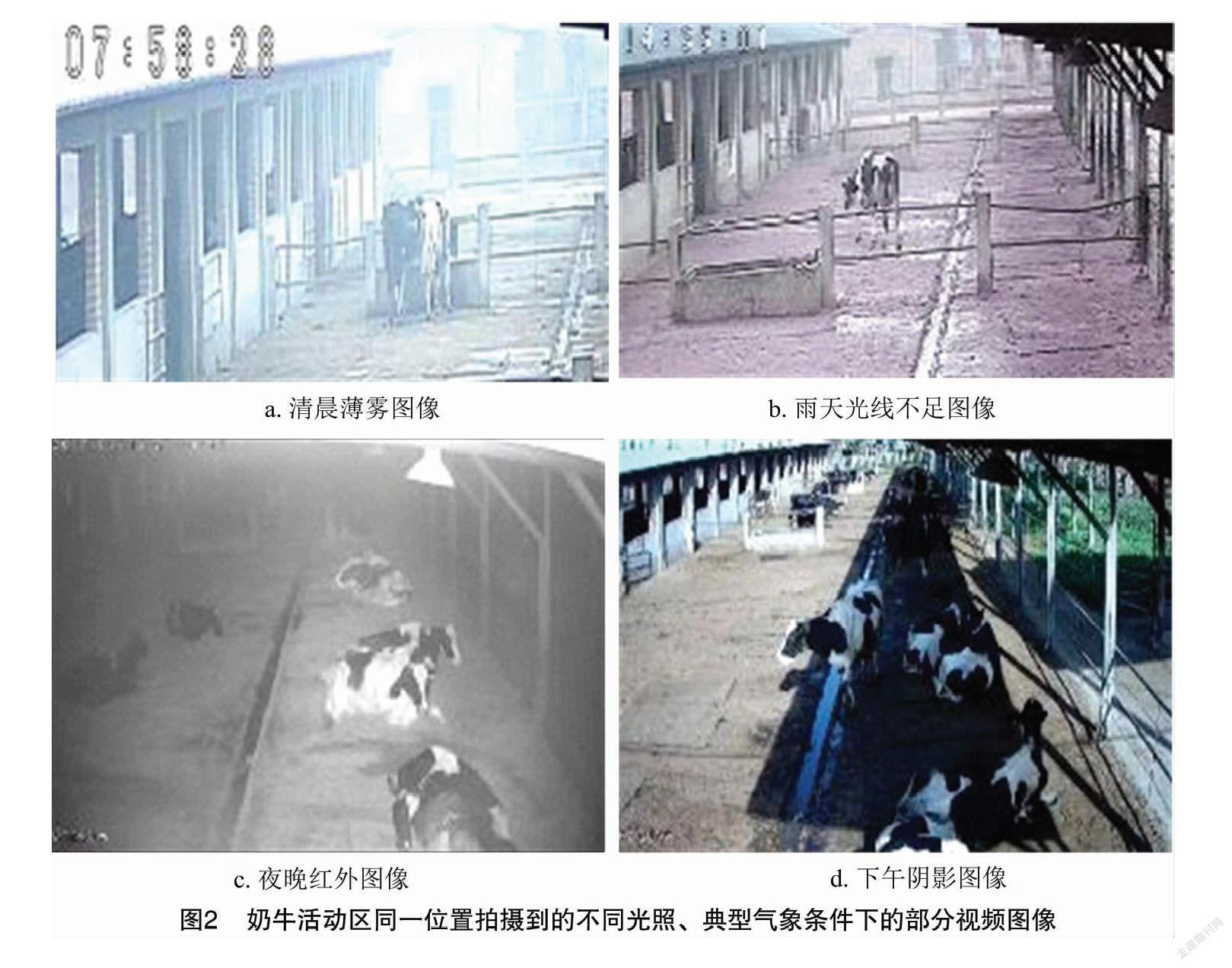
为了对真实的奶牛养殖场视频图像进行增强处理,本研究采用实地监测拍摄的奶牛养殖场图像为样本进行分析。试验样本取自西北农林科技大学畜牧教学实验基地的奶牛养殖场,通过分析奶牛养殖区的功能划分,奶牛有意义的行为活动主要发生在养殖场的奶牛活动区。采用CCD网络摄像机(型号为YW7100HR09-SC62-TA12,生产商为深圳亿维锐创科技有限公司)进行图像样本采集,分辨率为1 920像素(水平)×1 080像素(垂直)(图1、图2)。
由图2可知,清晨、傍晚时段的太阳光照变弱,采集的图像表面整體偏暗、光照突变、出现明暗区等;阴天、雾天、霾天时采集的图像表面整体偏暗、模糊、对比度差、色彩污染等;夜间为了减少奶牛的应激不适,夜间牛场光线较弱,摄像机一般在红外模式下监控,采集的图像为红外图像,图像整体模糊;晴朗的下午时段太阳光照较强,采集的图像表面存在强反射光或阴影区等。
2 本研究图像增强算法
通过对奶牛场采集的不同光照、不同气象条件的视频图像进行分析,发现光照变化后图像的高频部分噪声较大,低频部分主要表现为亮度和对比度变化。因此,本研究提出基于双域分解的图像增强算法,首先采用双域滤波替代传统算法的高斯滤波,获得图像的高频系数和低频系数;然后采用改进的Garrote阈值法和伽马变换对高频图像进行滤波调整;同时采用DCP算法对低频图像进行去雾,并根据CLAHE算法对低频图像进行增强;最后通过处理后的高频图像和低频图像重构来生成增强后的视频图像,以克服不同气象和光照条件对奶牛活动区监测图像质量的影响,进而提高图像的整体视觉效果。
2.1 双域滤波模型
双域滤波图像去噪(dual domain image denoising,DDID)算法是一种非线性的二维信号滤波方法,是结合像素的空域距离邻近度和像素间灰度值相似度的一种图像处理方法。与高斯滤波器相比,DDID算法使用双域滤波器和短时傅里叶变换对图像进行多尺度降噪[7]。因此,本研究选用双域滤波器对奶牛活动区监测图像进行单尺度分解。双域滤波器中,输出图像的像素值依赖于邻域像素值的加权组合,其定义见公式(1)
f L(i,j)=∑ k,lf(k,l)w(i,j,k,l)∑ k,lw(i,j,k,l)。(1)
式中:f(k,l)表示原噪声图像f;w(i,j,k,l) 表示权重系数;f L(i,j)表示输出的低频图像f L。
权重系数w(i,j,k,l)取决于空间域核和像素值域核,空间域核定义见公式(2)
d(i,j,k,l)=exp-(i-k)2+(j-l)22σ2 d。(2)
式中:d(i,j,k,l)表示基于空间距离的高斯权重;(i,j)表示邻域像素点位置坐标;(k,l)表示中心像素点坐标;σ2 d表示空间域方差。
像素值域核定义见公式(3)
r(i,j,k,l)=exp-‖f(i,j)-f(k,l)‖22σ2 r。(3)
式中:r(i,j,k,l)表示基于像素间相似程度的高斯权重;σ2 r表示值域方差。
权重系数w(i,j,k,l)为空间域核和像素值域核的乘积,表达式见公式(4)
w(i,j,k,l)=exp-(i-k)2+(j-l)22σ2 d-‖f(i,j)-f(k,l)‖22σ2 r。(4)
2.2 高频降噪与增强模型
针对奶牛活动区视频图像经DDID算法滤波处理后仍含有大量的噪声成分,需要对DDID算法滤波后获得的高频图像f H增强之前进行进一步降噪,否则在增强图像细节特征的同时将放大噪声。f H由原噪声图像f与双域滤波器分解出的低频图像f L差分得到。由于高频图像f H采用传统空域滤波或值域滤波法很难将f H中的噪声去除。因此,本研究采用改进的Garrote小波阈值函数构建高频去噪模型。
2.2.1 小波阈值去噪模型 目前,针对传统小波阈值去噪的硬阈值、软阈值去噪模型存在的缺陷[8],改进后2类典型的小波阈值去噪(wavelet threshold denoising,WTD)模型定义见公式(5)、公式(6)。
2.2.1.1 Semisoft去噪模型[9]
μ T(ω i,j)=0 |ω i,j<T 1|
sgn(ω i,j)·T 2(|ω i,j-T 1|)T 2-T 1T 1<|ω i,j|<T 2
ω i,j|ω i,j|≥T 2。(5)
式中:μ T表示小波去噪后的高频系数;ω i,j表示第i层小波分解下的第j个高频系数;sgn(ω i,j)表示符号函数;T 1、T 2表示小波阈值函数的2个阈值。
2.2.1.2 Garrote去噪模型[10]
μ T(ω i,j)=0 |ω i,j|<T
ω i,j-T2ω i,j|ω i,j|≥T。(6)
式中:μ T表示小波去噪后的高频系数;ω i,j表示第i层小波分解下的第j个高频系数;T表示小波阈值。
Semisoft去噪模型能够较好地兼顾软、硬阈值函数的优点,但该模型須要计算2个阈值,存在计算量大、算法实现困难等缺点。Garrote去噪模型能够较好地保持图像平滑,且在一定程度上能较好地保留图像的边缘特征信息,缺点是小波阈值T无法随着小波分解层数的增加自适应地实现阈值调整,进而导致增强后的图像出现模糊。
在采集的奶牛活动区监测图像中,针对上述典型的2类去噪模型进行图像增强后出现不同程度的缺点,无法改善夜间、阴暗天气的奶牛视频图像效果。本研究引入了一种改进的Garrote小波阈值去噪模型,该模型在整个定义域内连续,同时避免了固定偏差的产生,计算较简便,能够应用于不同噪声环境下的图像去噪,其表达式见公式(7)。
μ T(ω i,j)=sgn(ω i,j)·(1-s)T·ω2 i,j |ω i,j|<T
ω i,j-s·T2|ω i,j||ω i,j|≥T。(7)
式中:s表示自适应权值因子,s∈(0,1)。
该模型中自适应权值因子s能够根据小波分解后的噪声系数分布情况自适应调整,大幅度提高模型的灵活性和实用性,其s可由公式(8)计算得到
s=m/M。(8)
式中:M表示小波高频系数长度;m表示小波高频系数中大于阈值的频数。
2.2.2 阈值选取 针对采集的奶牛不同养殖环境下的视频图像,其噪声系数不尽相同,若待处理图像均采用相同的阈值,则阈值过大时,使得低于阈值的有效小波系数置0,造成图像的细节体征模糊;而阈值选取太小时,导致在小波降噪中残留较多的噪声信号,降低高频图像f H小波去噪算法的去噪效果。因此,本研究采用贝叶斯估计的小波收缩阈值方法,自适应调整小波阈值,具体计算过程如下。
(1)根据贝叶斯估计理论,DDID算法滤波后,高频图像f H服从均值位0,方差为σ2 x的广义高斯分布。
Φ(x,σ2 x)=12πσ2 xexp-x22σ2 x。(9)
(2)对于给定的参数σ x,则根据贝叶斯风险估计函数r(T)寻找最优化的阈值T[11]。由文献[12]可知阈值计算表达式为
T i=σ2σ x。(10)
式中:σ2表示高频图像f H的噪声方差;σ x表示高频图像f H的标准差。
(3)噪声方差σ2采用Donoho提出的鲁邦性中值估计[13],见公式(11)。
σ=median(|ω i,j|)/0.674 5。(11)
式中:ω i,j表示高频图像f H的坐标(i,j)系数值。
(4)采用最大似然估计(ML)方法得到每个含噪观测子带的方差估计,见公式(12)。
σ2 y=1n∑nj=1ω2 i,j。(12)
式中:n表示高频图像f H中像素总数。
(5)由σ2 y=σ2 x+σ2可得σ x的计算公式。
σ x=max(σ2 y-σ2,0)。(13)
通过公式(11)、(12)、(13)能够计算不同小波尺度下的自适应小波阈值T,并克服固定小波阈值的缺点。
2.3 低频图像去雾与增强模型
由于自然环境条件下奶牛养殖场环境复杂,导致摄像机采集的视频图像体现出多特征性。针对奶牛雾天或夜间红外图像中目标景物各点温度差别较小,表现为像素点邻域像素灰度值相似度高,导致红外图像模糊,细节不清晰,与可见光图像受雾气影响图像相似[14-15]。因此,本研究采用基于暗通道先验的去雾模型对低频图像f L进行可见光或红外图像增强,同时针对去雾处理后图像亮度较暗的情况,采用对比度受限的自适应直方图算法对处理后低频图像进行增强,进一步提升图像的亮度与对比度。
2.3.1 暗通道先验去雾原理 目前,基于暗通道先验(dark channel prior,DCP)的典型去雾增强算法进行多种改进优化,在低照度和夜晚红外图像增强方面已经取得了较好的视觉效果[16]。在机器视觉领域中,光在雾天传输的物理模型广泛采用如下公式。
I(x)=t(x)J(x)+[1-t(x)]A。(14)
式中:I表示输入(观测到的)有雾图像;t表示目标与摄像机之间的大气透射率;A表示大气环境光;J表示待恢复的无雾图像;x表示图像空间坐标。
可见光或红外图像去雾的目标就是由已知的I求得未知参数J、A、t。由于公式(14)中已知项数量少于未知项数量,须增加一些假设和先验等约束条件来求解。
暗通道先验是基于大量户外无雾图像观察到的一条统计规律:在绝大多数户外无雾图像的每个局部区域至少存在某个颜色通道的强度值很低[17]。对户外无雾图像J进行分块,将每个像素块定义暗通道为
Jdark(x)=minc∈{r,g,b}{miny∈Ω(x)[J c(y)]}。(15)
式中:Ω(x)表示以x为中心的正方形邻域;J c表示J三原色中的1个通道;Jdark(x)表示图像J在这个邻域的暗通道,观察统计表明Jdark趋于0。
假设每一个像素块的大气光透射率t(x)相同,且大气环境光A已知。因此,计算图像中每个像素块的大小对透射率进行估计。根据公式(14)即可求取每个像素块的最小值,为公式(16)。
minx[miny∈Ω(x)(I c(y)A c)]=t(x)minc[miny∈Ω(x)(J c(y)A c)]+[1-t(x)]。(16)
根据暗通道先验无雾图像的暗通道趋于0,故由公式(16)可得大气透射率t(x)预估值为公式(17)。
t(x)=1-mincminy∈Ω(X)I c(y)A c。(17)
由于带雾图像在x邻域的暗通道值[公式(17)中的第2项]能够由图像得到。因此,局部区域的t值可以求得,并得到整幅图的透射率t(x)。但当 t(x) 的值很小并趋于0时,会导致J的值偏大,从而使图像整体趋于白場,因此设置一个透射率的下限t 0(通常设置为0.1)。
根据估计大气环境光A和公式(17)求得的大气透射率t(x),最终可得到J的求解公式为
J(x)=I(x)-Amax(t(x),t 0)+A。(18)
基于暗通道先验去雾能够克服大气光对奶牛活动区监测成像环境的影响,消除由水蒸气、雾霾等环境光造成的图像模糊。
2.3.2 对比度受限的自适应直方图均衡化算法 基于暗通道先验去雾后的低频图像纹理清晰,边缘突出,细节信息增强明显。由于采用均值估计大气环境光,去雾处理后图像整体偏暗,需进一步进行全局对比度增强,以获取更好的视觉效果。因此,本研究采用对比度受限的自适应直方图均衡化(CLAHE)算法提高其对比度和亮度,其快速算法实现过程见文献[17]。
2.4 本研究算法实现过程
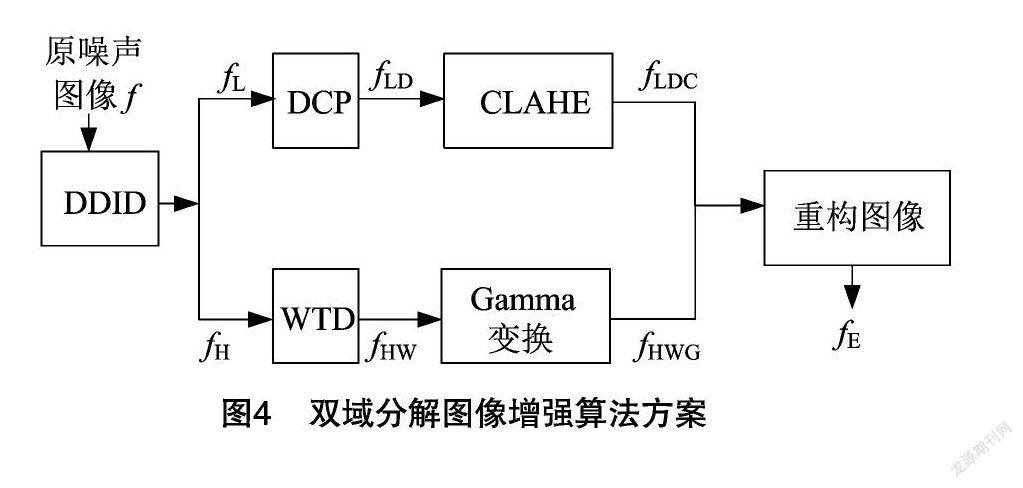
本研究提出的基于双域分解的复杂光照下奶牛图像增强算法,其算法具体实现流程如下:(1)将原噪声图像f进行DDID算法滤波处理,输出低频图像f L,原噪声图像f与低频图像f L差分后的图像为高频图像f H。(2)通过公式(8)计算自适应权值因子,并根据贝叶斯理论计算小波阈值T。(3)采用改进的Garrote小波阈值去噪(WTD)模型对高频图像f H进行小波去噪处理,得到高频图像去噪图像f HW。(4)由公式(14)计算去噪后高频图像f HW的对比度矫正后图像f HWG。(5)通过DCP估计大气环境光A和大气透射率t,并利用DCP快速算法对f L去雾处理,得到去雾低频图像f LD。(6)根据CLAHE算法对f LD进行增强,得到对比度和整体亮度提高的图像f LDC。(7)将滤波和增强处理后的低频图像和高频图像进行系数重构,得到增强后的图像f E。
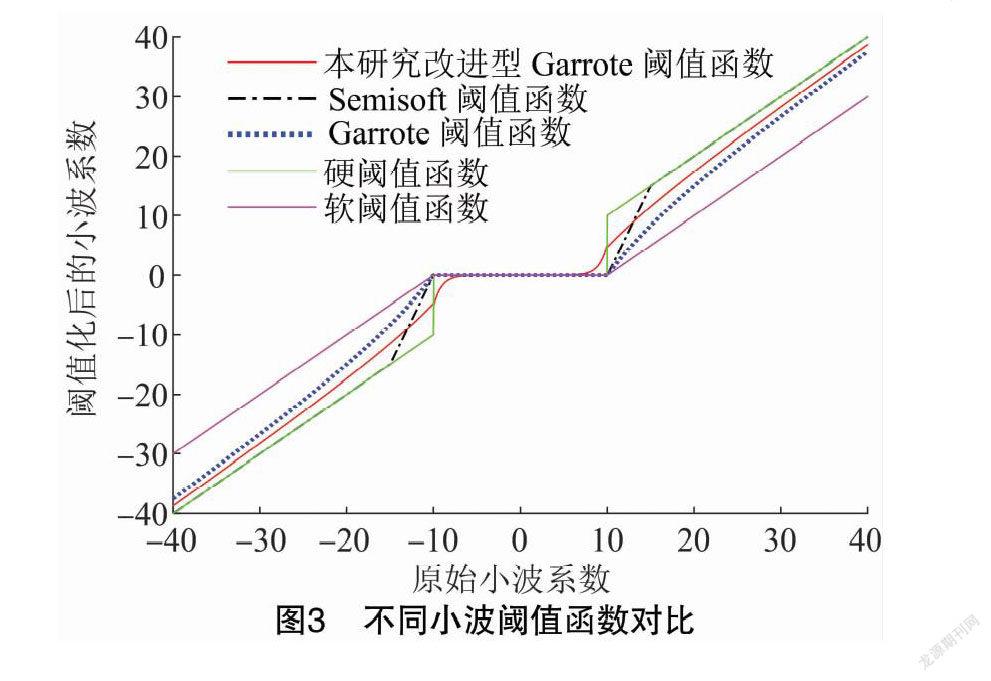
本研究改进的Garrote小波阈值函数与Garrote阈值函数、Semisoft阈值函数、软硬阈值函数对比见图3,所提出的基于双域分解的复杂环境下奶牛图像增强算法实现方案见图4。
3 试验结果与分析
3.1 试验测试平台及参数选取
为了验证本研究所述一种复杂光照条件下奶牛監测图像增强算法的有效性,通过对直方图均衡算法(histogram equalization,HE)、Retinex算法、CLAHE算法[17]、自适应Retinex算法以及本研究所述算法进行对比试验分析,并根据试验结果分别对其进行主观视觉和客观评价与分析。
本试验所用计算机配置:CPU为Inter Core i3-6100CPU,3.70 GHz,RAM 4 GB;运行环境为MATLAB R2017b版本。根据奶牛养殖场的实际监测环境,并分析优化对比算法中的控制参数,控制参数设置如下:CLAHE算法中的子块大小为8×8,对比度增强的限制参数取0.02;自适应Retinex算法的滤波器平滑因子为ε=0.01,窗口大小为5×5,拉伸因子α为1.05,尺度为300。结合上述对比算法的参数设置,为了突出本研究所述算法的优越性,算法中滤波器参数为σ r=25、σ d =0.2,低频部分对比度调整子块大小为8×8,对比度增强的限制参数取0.02(与CLAHE算法中子块参数设置一样)。
3.2 试验数据及主客观评价与分析
为验证本研究所述算法的去雾性能、噪声抑制性能、增强性能以及算法的鲁棒性能。奶牛养殖场活动区复杂环境下采集的图像划分为清晨、中午、傍晚、夜间、雾天、雨天等,并对其进行试验验证。
为了说明本研究算法的有效性以及更加直观和客观地对不同算法的增强效果进行评价,采用图像增强效果图和直方图对其进行主观评价,采用增强图像与原始图像之间的标准差(standard deviation,SD)、峰值信噪比(peak signal to noise ratio,PSNR)、信息熵(information entropy,IE)、结构相似性(structural similarity index measurement,SSIM)4个客观评价指标分别对增强效果图像的亮度、对比度、细节信息、噪声水平、失真程度等进行衡量。其中,SD值越大,代表图像差异范围也越大,图像的对比度也越大;PSNR值越大,则表示图像增强后的保真程度越好,图像增强效果也越好;IE值越高,说明图像中蕴含的信息量越多,表示增强后的图像信息越丰富;SSIM值越大,表示结构相似度越高,增强效果越好,其最大值为1。清晨和中午监测的奶牛视频图像处理结果及分析如下。
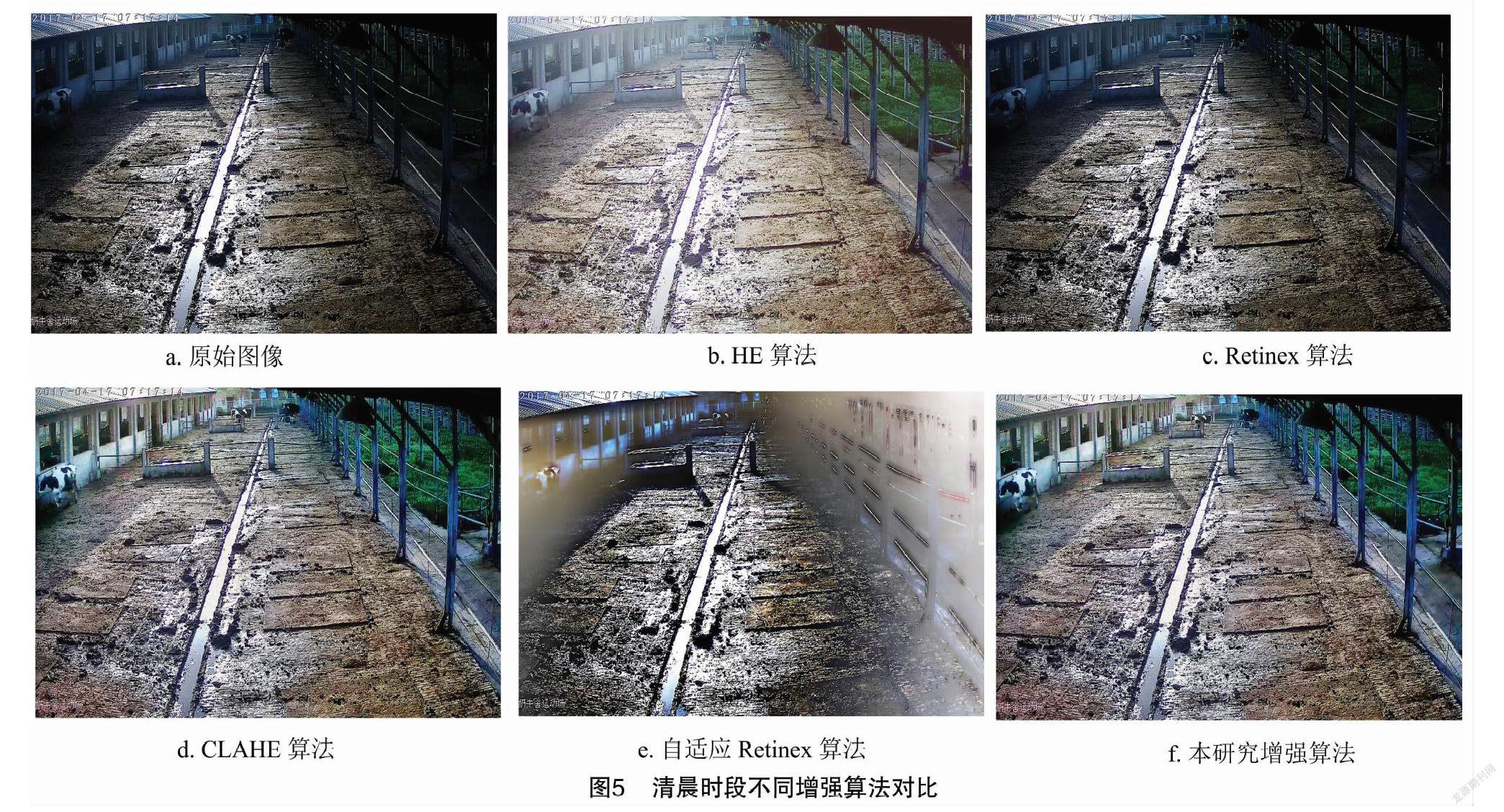
3.2.1 清晨时段采集图像增强处理(图5) 清晨时段,不同增强算法的客观评价参数对比见表1。
由图5的视觉效果可知,清晨时段原始噪声图像中,图像存在对比度低、整体亮度偏暗以及纹理信息模糊等缺点,导致视觉效果较差。在经过上述不同图像增强算法处理后,图5-a中的原始噪声图像整体视觉效果得到不同程度的改善。
由图5和表1综合分析可知,图5-b采用HE算法对图像进行直方图均衡化增强,该算法能够增强图像对比度,改善图像的整体亮度,并使得图像更加清晰化,但也存在部分图像细节信息丢失,图像失真较严重;图5-c采用Retinex算法进行图像增强后,对比度有所提高,图像去噪效果明显,图像整体失真较小,但图像整体偏暗,对比度较差,信息熵较小,视觉效果改善不明显;图5-d采用改进的CLAHE算法进行图像增强后,图像整体亮度有所改善,灰度动态范围扩大,但存在图像对比度过高,图像边缘细节信息保持较差等问题;图5-e采用自适应Retinex算法对图像进行增强后,图像灰度动态范围扩大,但也存在图像亮度过高,图像边缘细节保持不好,图像失真严重等问题;图5-f采用本研究提出的增强算法对图像进行处理后,该算法能够很好地实现低照度图像增强,提高图像的整体亮度和对比度,并突出原有的细节特征,使增强后的图像更加符合人眼视觉特征。
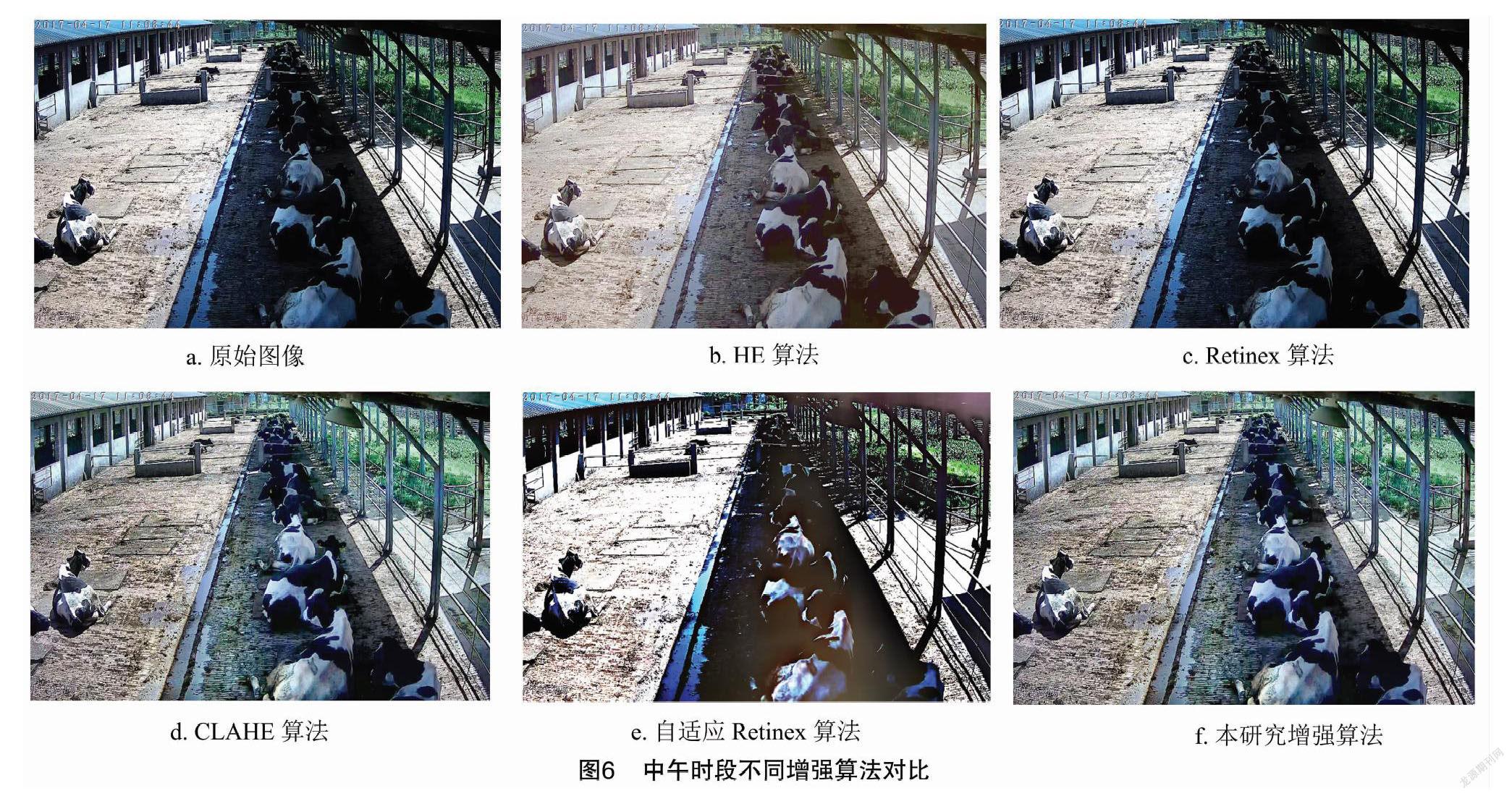
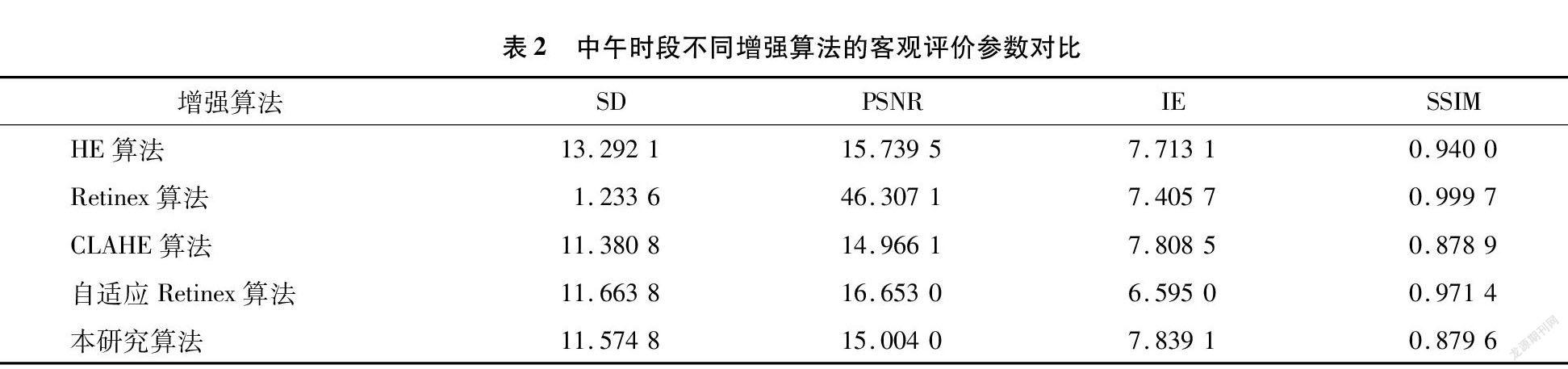
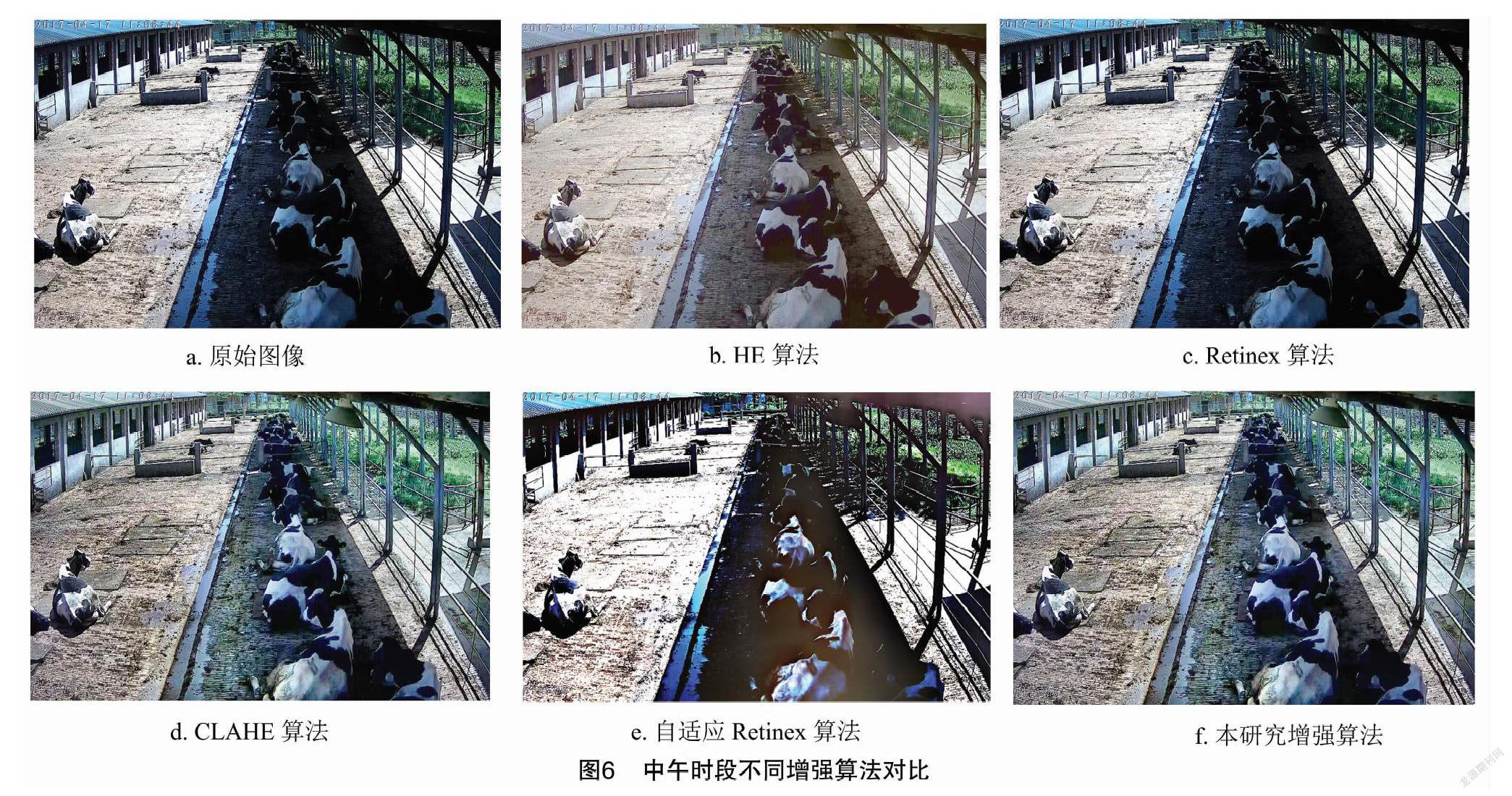
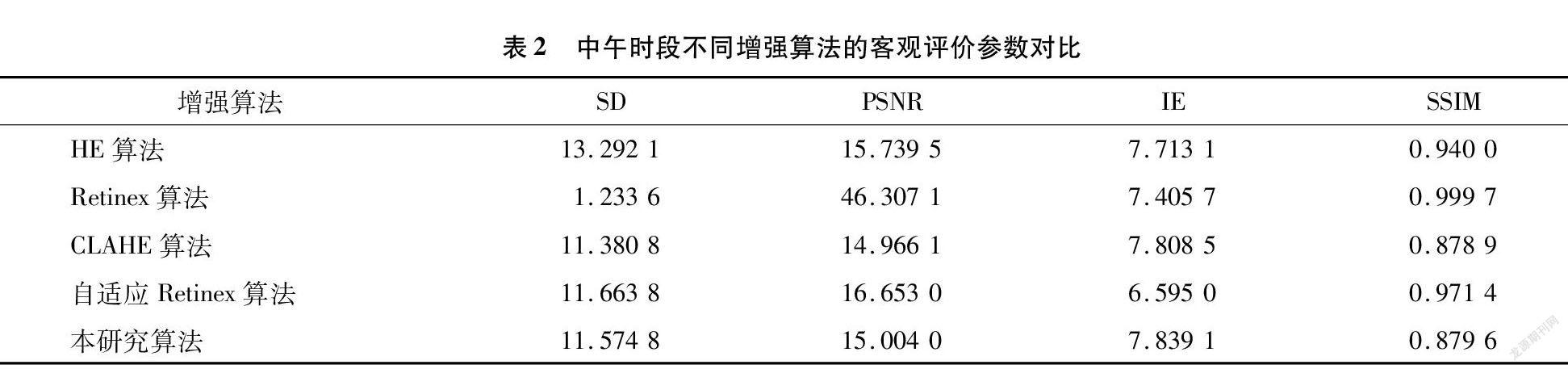
3.2.2 中午时段采集图像增强处理(图6) 中午时段不同增强算法的客观评价参数对比见表2。
由图6的视觉效果可知,中午时段原始噪声图像中,图像存在光照不均匀和纹理信息模糊等缺点,导致视觉效果较差。在经过上述不同图像增强算法进行处理后,图6-a中的原始噪声图像整体视觉效果得到不同程度的改善。图6-b采用HE算法对图像进行直方图均衡化增强,该算法能够改善图像的整体亮度,信息熵值较高,但存在图像过增强,导致原图像高亮部分细节信息丢失,图像失真较严重;图6-c采用Retinex算法进行图像增强后,图像去噪效果明显,图像整体失真较小,但图像对比度和亮度改善效果不明显,信息熵较小;图6-d采用改进的CLAHE算法进行图像增强后,图像对比度得到部分提高,信息熵值较大,但图像亮度改善不明显,去噪效果较差,且存在图像边缘信息丢失等问题;图6-e采用自适应Retinex算法对图像进行增强后,图像去噪效果较好,但图像亮度过高,图像边缘细节保持较差,并存在图像过增强等缺点;图6-f采用本研究提出的增强算法对图像进行处理后,该算法能够有效改善光照不均匀导致的图像视觉效果较差的问题,提高图像的整体亮度和对比度,无引入新的噪声信号,能够很好地保持图像原有的细节特征信息,且图像整体饱和自然,更加符合人眼视觉特征。
3.3 综合测试与分析
为了进一步验证本研究所提图像增强算法的鲁棒性,从奶牛场活动区域的摄像机监测视频中随机选取3个月内清晨、上午、中午、下午、傍晚、夜间、阴天、雾天的8个光照、气象变化的图像各50张,共计400张图像样本。将本研究算法与已有的HE算法、Retinex算法、CLAHE算法、自适应Retinex算法进行试验比对,同时选取SD、PSNR、IE、SSIM等4个指标来对本研究算法与其他5种增强方法进行客观评价。
根据6种算法对比的客观评价指标可知,本研究算法相比于HE算法、Retinex算法、CLAHE算法、自适应Retinex算法,SD值平均分别提高1.929 5、4.681 2、3.245 0、0.533 0,PSNR值平均分别提高0.526 0、-13.777 5、-0.469 0、1.197 5,IE值平均分别提高0.155 5、0.539 7、0.029 7、0.590 5,SSIM值平均分别提高0.005 2、-0.082 7、0.058 8、0.046 3。采用本研究提出的增强算法对图像进行处理后,该算法能够有效改善不同时段光照、复杂气象条件下的图像视觉效果,提高图像的整体亮度和对比度,无引入新的噪声信号,能够很好地保持图像原有的细节特征信息,且图像更加饱和自然,更加符合人眼视觉特征。
4 结论
通过引入自适应调节因子的小波去噪模型对高频图像进行滤波处理,并采用贝叶斯估计方法得到高频图像的小波阈值,能够去除奶牛视频图像中的大部分噪声信号;结合伽马变换能够较好地实现对去噪的高频图像的对比度矫正,改善图像的细节特征,减小图像失真程度。通过暗通道先验能够对低频图像进行有效去雾,增强图像的细节信息,改善图像的视觉效果;采用CLAHE算法对去雾后整体偏暗的低频图像增强后,可以极大地提高图像的对比度和整体亮度;经过重构后的特征图像较原始图像的对比度、信噪比、清晰度、亮度方面都有较好的改善。本研究增强算法能够适应奶牛养殖场的复杂气象和光照条件,实现对奶牛监测图像的有效去噪,有效增强图像的整体和细节信息、改善图像视觉效果等,实现不同时段和復杂气象条件下的奶牛监测图像增强,进而为基于机器视觉的奶牛行为自动识别奠定良好的基础。
参考文献:
[1]刘杰鑫,姜 波,何东健,等. 基于高斯混合模型与CNN的奶牛个体识别方法研究[J]. 计算机应用与软件,2018,35(10):159-164.
[2]顾静秋,王志海,高荣华,等. 基于融合图像与运动量的奶牛行为识别方法[J]. 农业机械学报,2017,48(6):145-151.
[3]范伟强,刘 毅.基于自适应小波变换的煤矿降质图像模糊增强算法[J]. 煤炭学报,2020,45(12):4248-4260.
[4]Kim Y T. Contrast enhancement using brightness preserving bi-histogram equalization[J]. IEEE Transactions on Consumer Electronics,1997,43(1):1-8.
[5]江巨浪,张佑生,薛 峰,等. 保持图像亮度的局部直方图均衡算法[J]. 电子学报,2006,34(5):861-866.
[6]曾陈颖.面向珍稀野生动物保护的图像监测与识别技术研究[D]. 北京:北京林业大学,2015.
[7]艾玲梅,任阳红.基于双域滤波与引导滤波的快速医学MR图像去噪[J]. 光电子·激光,2018,29(7):787-796.
[8]霍跃华,范伟强.一种煤矿井下复杂光照条件下的人脸识别方法[J]. 激光与光电子学进展,2019,56(1):108-115.
[9]Chen Y,Han C.Adaptive wavelet thresholding for image denoising[J]. Electronics Letters,2005,41(10):586-587.
[10]覃爱娜,戴 亮,李 飞,等. 基于改进小波阈值函数的语音增强算法研究[J]. 湖南大学学报(自然科学版),2015,42(4):136-140.
[11]胡海平,莫玉龙.基于贝叶斯估计的小波阈值图像降噪方法[J]. 红外与毫米波学报,2002,21(1):74-76.
[12]王泉德,肖继来,谢 晟.BOLD效应fMRI图像的自适应阈值小波去噪方法[J]. 计算机工程与应用,2017,53(8):170-173,239.
[13]Donoho D L.De-noising by soft-thresholding[J]. IEEE Transactions on Information Theory,1995,41(3):613-627.
[14]李赓飞.自适应图像实时增强算法的技术研究[D]. 长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所),2017.
[15]李 毅,张云峰,张 强,等. 基于去雾模型的红外图像对比度增强[J]. 中国激光,2015,42(1):0113004.
[16]Zhang X D,Shen P Y,Luo L L,et al. Enhancement and noise reduction of very low light level images[C]//Proceedings of the 21st International Conference on Pattern Recognition,Tsukuba,2012:2034-2037.
[17]Zhang L B,Wang S Y,Wang X H.Saliency-based dark channel prior model for single image haze removal[J]. IET Image Processing,2018,12(6):1049-1055.
猜你喜欢
吉林电力(2022年2期)2022-11-10 09:24:42
客联(2022年6期)2022-05-30 07:43:00
法律方法(2021年4期)2021-03-16 05:34:38
中国生物医学工程学报(2019年6期)2019-07-16 07:53:04
智富时代(2018年11期)2018-01-15 09:52:06
自动化学报(2017年5期)2017-05-14 06:20:53
数理化解题研究(2017年4期)2017-05-04 04:07:54
铁道通信信号(2016年6期)2016-06-01 12:10:20
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:53
电子器件(2015年5期)2015-12-29 08:43:15