改进MPC的无人驾驶汽车路径规划研究*
2022-06-08 03:14雷芳华朱建武
南方农机 2022年11期
雷芳华,朱建武,陈 丹
(郴州职业技术学院,湖南 郴州 423000)
模型预测控制方法简称MPC,是一种基于模型的闭环优化控制方法,MPC方法多年以来不断地被完善和优化,在工业过程中被应用到机器人、飞行器、网络系统等领域[1-5]。MPC方法被运用到无人驾驶汽车的路径规划方面,也取得了一定的研究成果,比如,通过MPC的方法实现了避障功能[6-7];以MPC为基础,建立3自由度车辆模型,提高了智能车辆的路径跟踪能力,并且稳定性较好[8];根据“车-路”的相对位置关系,结合MPC能解决躲避静态障碍和低速动态障碍车的问题[9];基于实时输出约束MPC的算法提高了在高速驾驶情况下的鲁棒性和驾驶员的舒适度[10]。但是也有一些不足之处,如在多障碍物以及感知障碍信息不全环境下的避障问题方面。基于此,本文提出了以MPC为基础,引入无人驾驶汽车速度因子作为惩罚函数的动态权重系数,构建惩罚函数权重策略,建立带避障功能的汽车运动学模型,在预定“超车”工况中进行Matlab/Simulink、CarSim联合仿真试验,分析避障轨迹的合理安全性以及避障的稳定性。
1 改进MPC的数学模型
本文的模型预测控制建立在假设无人驾驶车点质量模型的基础上,由带避障功能的路径重规划模块和跟踪控制模块组成,主要是在路径重规划模块中引入带车速因子以及构建权重策略的惩罚函数。惩罚函数的基本思路是计算障碍物点与目标规划点的距离偏差来调节函数值的大小[11],一般的函数值的大小由距离和权重系数决定,大部分权重系数都是固有值,本文引入车速因子作为动态权重系数,构建惩罚函数的权重策略。带避障功能的改进模型预测控制器如图1所示。

图1 带避障功能的改进模型预测控制器
避障过程中,为避免无人车在最小车距时发生刮擦,甚至碰撞,构建惩罚函数的权重策略如下。
判断重规划路径参考点与障碍物信息点的距离平方是否小于安全阀值A,即判断是否:

如果大于等于安全阀值,则采用带车速因子的惩罚函数数学表达式如下:

如果小于安全阀值,则采用带车速因子的惩罚函数数学表达式如下:

式(1)(2)(3)中,A为避免刮擦的安全阀值;Jobs,i,m为采样时刻i的第m个障碍物信息点的避障函数;Sobs、SA为调节权重系数;VX为无人驾驶车在纵向(X向)的速度;(xm,ym)为第m个障碍物点在全局坐标系下的坐标;(X0,Y0)为无人驾驶车的坐标;ζ为防止分母为0的较小正数。
为实现路径局部重规划,设置目标函数,以最小化路径规划与全局参考路径的偏差,且实现避障功能。具体目标函数数学表达式如下[11]:

式(4)中,Np为预测时域;ŋ(t+i|t)为时刻t体现对全局参考路径跟随能力的状态变量;Q为反映控制器对全局参考路径跟随能力的权重矩阵;Ui为体现对稳定性控制增量作为约束的状态量;R为对控制量平稳变化的权重矩阵;M为障碍物信息点总数;Ut为控制量前轮偏角的物理约束条件。
2 Matlab和CarSim联合仿真试验
2.1 试验“超车”工况设置
为保证试验的准确性,联合Matlab/Simulink、CarSim 软件搭建了模型预测控制平台,设置为恒定车速实验动力学模型。
在仿真环境设置方面,忽略空气动力学方面的影响,为提高试验的可靠性和复杂性,主要对路面和动静态障碍物进行试验工况设置,如图2所示。设计了一条单向双车道,按照一般单车道宽度标准设置为3.75 m,道路上在50 m、70 m、90 m三处设置三辆静态障碍物汽车,车宽为2 m,在100 m处设置一辆动态障碍物汽车,当无人车到达60 m(T0)时,动态障碍物汽车开始以5 m/s的速度向前运行,车宽也为2 m。路面设置为雨天沥青路面,摩擦系数为0.4。

图2 试验“超车”工况设置
在避障过程中,如果避障距离过大,则过于保守;如果避障距离过小,则容易发生刮擦或者碰撞。本文以无人车车载传感器所在车道中心为坐标中心,结合车载传感器位置、车宽以及路宽等实际情况,设置避障变道“超车”安全要求:横向偏移合理安全范围是2.2 m~4.5 m,车载传感器检测到障碍物最近安全距离为1.1 m。
2.2 仿真“超车”工况试验
2.2.1 改进MPC的路径轨迹对比
利用Matlab/Simulink和CarSim 软件联合搭建模型预测控制平台来实现模型预测控制的路径规划,经过反复试验,将改进MPC的调节权重系数分别设置为Sobs=10,SA=100,将传统MPC的调节权重系数设置为200,考虑到规划路径的最优,求解器均采用全局优化算法GS来求解最优值。通过工况设置进行试验,对比改进MPC和传统MPC的10 m/s、20 m/s、30 m/s避障轨迹如图3所示。
由仿真结果图3可以看出,无人驾驶汽车在“超车”行驶路径中,改进MPC和传统MPC规划出的“超车”轨迹呈现较为接近,改进MPC的避障轨迹在“超车”过程中前段相对提前,后段相对延后,且20 m/s速度的避障轨迹都较为合理。为分析10 m/s、30 m/s速度的避障过程是否发生刮擦或者碰撞,根据“超车”路径数据流分析避障变道过程中50 m处横向偏移量、最大横向偏移量、车载传感器检测到障碍物最近距离的数据,如表1所示。
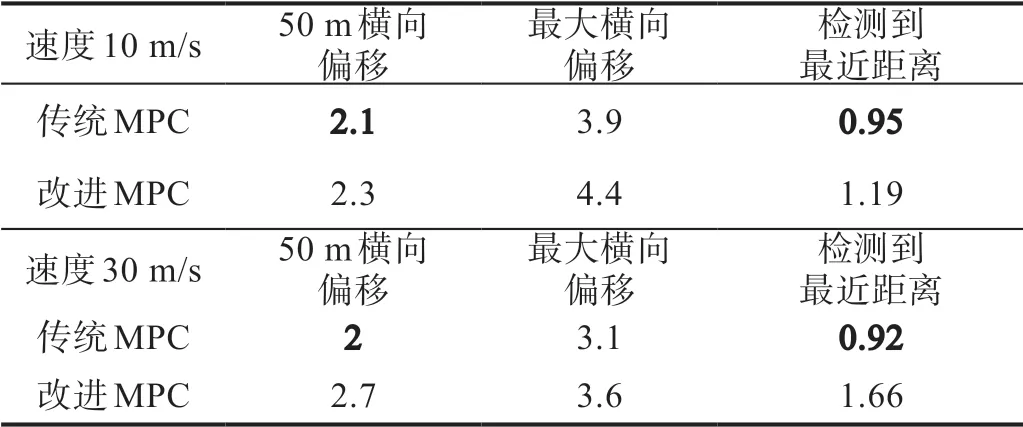
表1 改进MPC和传统MPC的“超车”数据流 单位:m
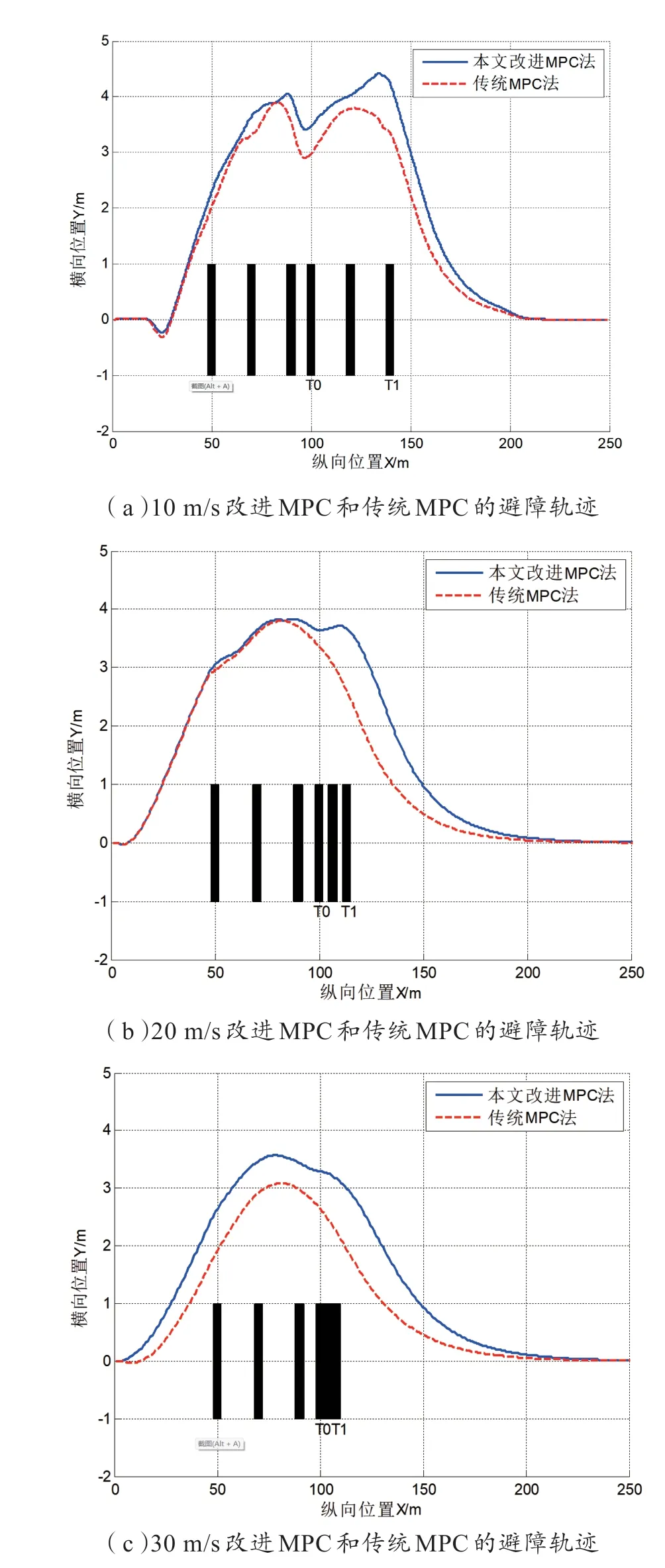
图3 改进MPC和传统MPC的避障轨迹对比
从表1中,用粗体标出不符合横向偏移合理安全范围和最近安全距离的值,可以看出,改进MPC的“超车”路径规划结果相对合理,符合安全要求。
2.2.2 改进MPC的稳定性分析
通过工况设置进行试验,同样设置Sobs=10,SA=100,求解器采用全局优化算法GS。分析10 m/s、20 m/s、30 m/s改进MPC的避障侧向加速度和横摆角速度等行驶稳定性指标如图4、图5所示。
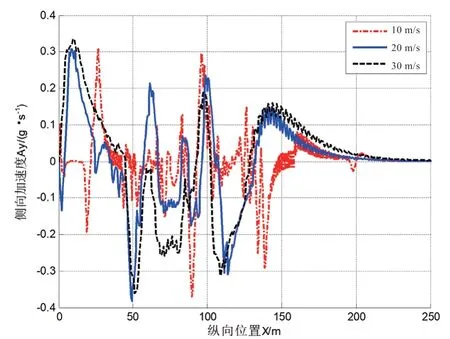
图4 改进MPC的侧向加速度分析

图5 改进MPC的横摆角速度分析
由仿真结果图4、图5可以看出,无人驾驶汽车在“超车”行驶路径中,改进MPC的侧向加速度峰值均小于3.9 m/s2(即0.4 g),横摆角速度峰值基本小于0.25 rad/s。在3种速度行驶下,改进MPC的路径规划能够满足稳定行驶要求。
3 结论
1)课题组提出了一种改进模型预测控制(MPC)的避障路径规划方法。该方法引入无人驾驶汽车速度因子作为动态权重系数,构建惩罚函数权重策略,建立带避障功能的汽车运动学模型,经过试验证明该方法可行。
2)通过Matlab/Simulink、CarSim 软件搭建改进模型预测控制平台,在预定“超车”工况中进行仿真试验。结果显示,改进MPC的无人驾驶汽车其路径规划的避障轨迹更合理安全,并有较好的横向稳定性。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08
心理学报(2022年5期)2022-05-16
当代陕西(2020年17期)2020-10-28
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
专用汽车(2018年10期)2018-11-02
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
科学大众(中学)(2017年3期)2017-07-06