基于并联机构的越野车辆发动机动态性能测试模拟平台构型综合与运动学分析
2022-06-08 03:54单彦霞郭亚磊高雪原张建伟李仕华
燕山大学学报 2022年3期
单彦霞,郭亚磊,高雪原,张建伟,李仕华,*
(1.燕山大学 河北省并联机器人与机电系统实验室,河北 秦皇岛 066004;2.燕山大学 机械工程学院,河北 秦皇岛 066004;3.燕山大学 里仁学院,河北 秦皇岛 066004)
0 前言
越野车辆经常行驶在丘陵、沙漠、山地、沼泽等路面上,发动机长期处于颠簸的状态,负载变化较大,长时间面临着冲击与振动。发动机的冷却系统、润滑系统以及燃油供油系统长期处于极限工况状态容易导致发动机出现磨损、局部过热、拉杆以及润滑不良等多种故障[1]。为了提高越野车辆发动机的可靠性,在发动机制造完成后,需要进行接近实际路况的动态测试,以暴露其设计和工艺上存在的问题。
目前常用的车辆发动机动态测试试验主要有三种,即实际道路试验、试验场试验和室内模拟道路试验[2]。实际道路试验需要实车行驶数万公里,还要经历沙漠、山地等极端行驶环境的考验。实际道路试验和试验场试验周期长,也会极大地耗费财力、物力以及人力。而室内模拟道路试验重复性好、周期短,已经成为越野车发动机设计开发中的主要试验方式。
美国MTS公司[3]研制出了大吨位战车发动机道路模拟用三自由度并联运动平台。Perkins发动机公司[4]设计了一种可旋转的发动机测试平台,能够在发动机倾斜的情况下测试磨损、排放及耐久度等。CFM Schiller公司[5]开发了一款发动机双轴倾斜试验台,可以测试非公路汽车发动机的润滑情况。穆格公司[6]推出了一种二自由度倾斜工作台,可实现大角度转动,该系统旨在对汽车部件进行动态功能测试。通用汽车公司[7]采用一种倾斜测试架来模拟由于赛车加速时润滑油面倾斜导致润滑不良现象,此测试架通过横向和纵向倾斜可以模拟赛车的横向和纵向加速度。佟德辉等[8]研发了一种发动机倾斜测试的平台,两个串联的相互垂直的转动副减小了负载在转动中产生的转动惯量。苑飞虎等[9]提出了一种可用于重载的6UPS-3UPS/UPU-R并联运动模拟平台,具有平衡负载重力的特点。南通常测机电设备有限公司[10]开发了能够测试汽车发动机在倾斜状态润滑性能的试验台,可以实现柴油机在任意方向倾斜±45°。由上述国内外研究现状可知,并联机构具有刚度高、承载能力强、运动惯性小等优点[11],在车辆发动机测试平台领域应用较为广泛。但是,目前的发动机动态测试大多数是只能沿两轴旋转的动态测试,而车辆本身的运动是多个自由度的耦合,上述测试平台难以实现对发动机实际路况下运动情况的精确模拟。
针对更加接近实际路况的发动机动态性能测试需求,本文综合出一种基于新型2UPS-2RPU-PU*冗余驱动并联机构的模拟平台。该平台具有两个相交于动平台中心的连续转轴,能够实现惯性较小的连续转动,承载能力强,且可以实现不同工况下的运动耦合。
1 用于发动机动态性能测试模拟平台的并联机构构型综合
1.1 工况分析
越野车辆在颠簸的路面行驶时,发动机会随着车辆上下颠簸和翻转,发生垂直方向的移动和俯仰、倾斜方向的转动,因此模拟平台应选用两转一移三自由度并联机构。
此外,模拟平台需要装载测功机和发动机等设备,还要求机构转动时较小的转动惯量,因此机构应具有较大的承载能力以及过负载重心的两个连续转轴。
1.2 构型综合
如图1所示的平面机构RPR-PR-RPR(R、P分别表示转动副及移动副),具有一个竖直方向的移动自由度和一个垂直于机构所在平面的转动自由度。
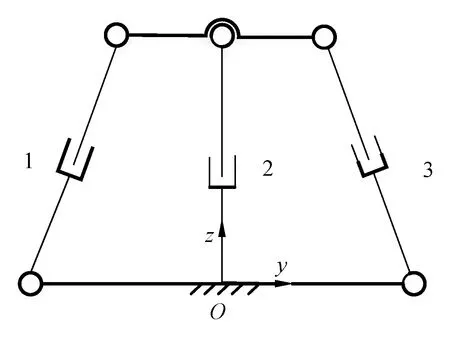
图1 RPR-PR-RPR机构Fig.1 RPR-PR-RPR mechanism
本文在RPR-PR-RPR构型的基础上,根据并联机构转轴存在的第一个转动条件,即并联机构中具有某一方向转动轴线的任意两分支都具有共线的该方向转轴[12],提出一种具有连续转轴的2R1T并联机构的综合方法,步骤如下:
1) 在RPR-PR-RPR机构的三分支末端加入沿着连杆轴线方向的转动副Ry;或在此基础上,再在每个分支末端添加一个转动副Rz,从而获得分支构型。
2) 将每个分支末端的两个转动副用万向铰代替,或者将末端的三个转动副或万向铰和一个转动副用球副代替,也可以获得不同的分支构型。
3) 将连杆替换为动平台,并引入一个或两个无约束分支进行驱动,进而得到2R1T并联机构新构型。根据并联机构的连续转轴判别条件[13]可知,综合得到的机构具有连续转轴。
综合得到的部分分支结构如表1所示。

表1 分支构型Tab.1 Branch configuration
为使机构实现确定的运动,需要再添加一个无约束分支。可以添加的无约束分支有:UPS、SPS、RUS、PSU、UPS、RSS、PSS等。
以结构简单且能实现较大转动范围为原则,选取RPU-PU-RPU为基础构型,并添加一个无约束分支UPS构造成为2RPU-PU-UPS(U表示万向铰,S表示球副)机构,结构简图如图2所示。
2 2RPU-PU-UPS机构自由度分析
该机构动平台与定平台通过四条支链相连,分别为:两条RPU支链、PU支链和UPS支链。其中两条RPU支链共面且对称分布,R副与定平台相连且轴线相互平行,U副与动平台相连的第一转动副轴线平行于R副轴线,P副同时与R副和U副的第一转动副垂直。中间PU支链竖直向上,其中U副的第一转动副平行于RPU支链中的U副的第一转动副。两条RPU支链中的U副第二转动副轴线与PU支链中的U副第二转动副轴线共线。UPS支链倾斜布置,垂直于其他三个支链所在平面,且U副位于定平台上。
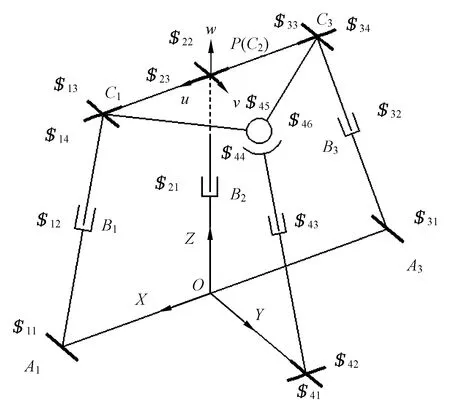
图2 2RPU-PU-UPS机构Fig.2 2RPU-PU-UPS mechanism
如图2所示,在UP分支下端建立定坐标系O-XYZ,Y轴方向与分支1、分支3的第一转动副平行,Z轴方向竖直向上,X轴方向与分支1、分支3连线方向相同。在UP分支中U副的位置建立动坐标系P-uvw,u轴方向与分支1、分支3中的第三转动副方向相同,v轴方向与分支1、分支3中的第二转动副方向相同,w轴方向垂直于动平台。
分支1的运动螺旋系:
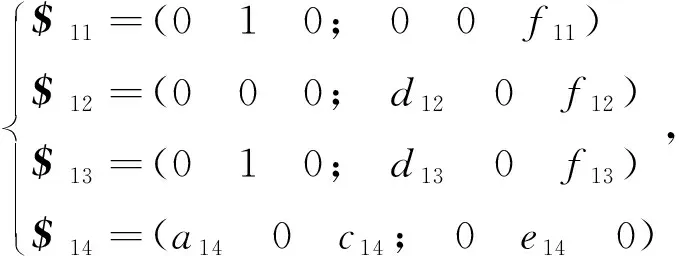
(1)
求解反螺旋得到分支1的约束螺旋系:

(2)

分支2的运动螺旋系:
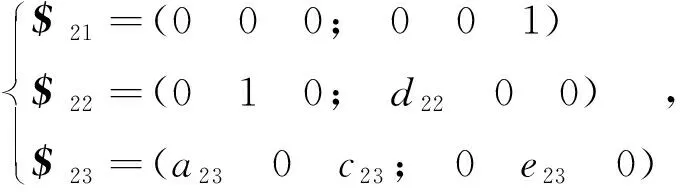
(3)
分支2的约束螺旋系:
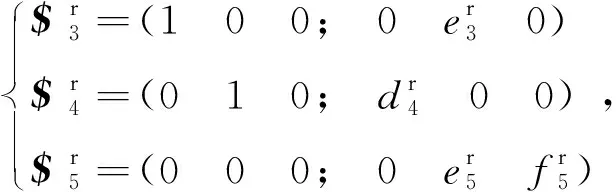
(4)

分支3与分支1同理,分支4是无约束分支。
动平台所受约束如图3所示,受到4个约束力和3个约束力偶。
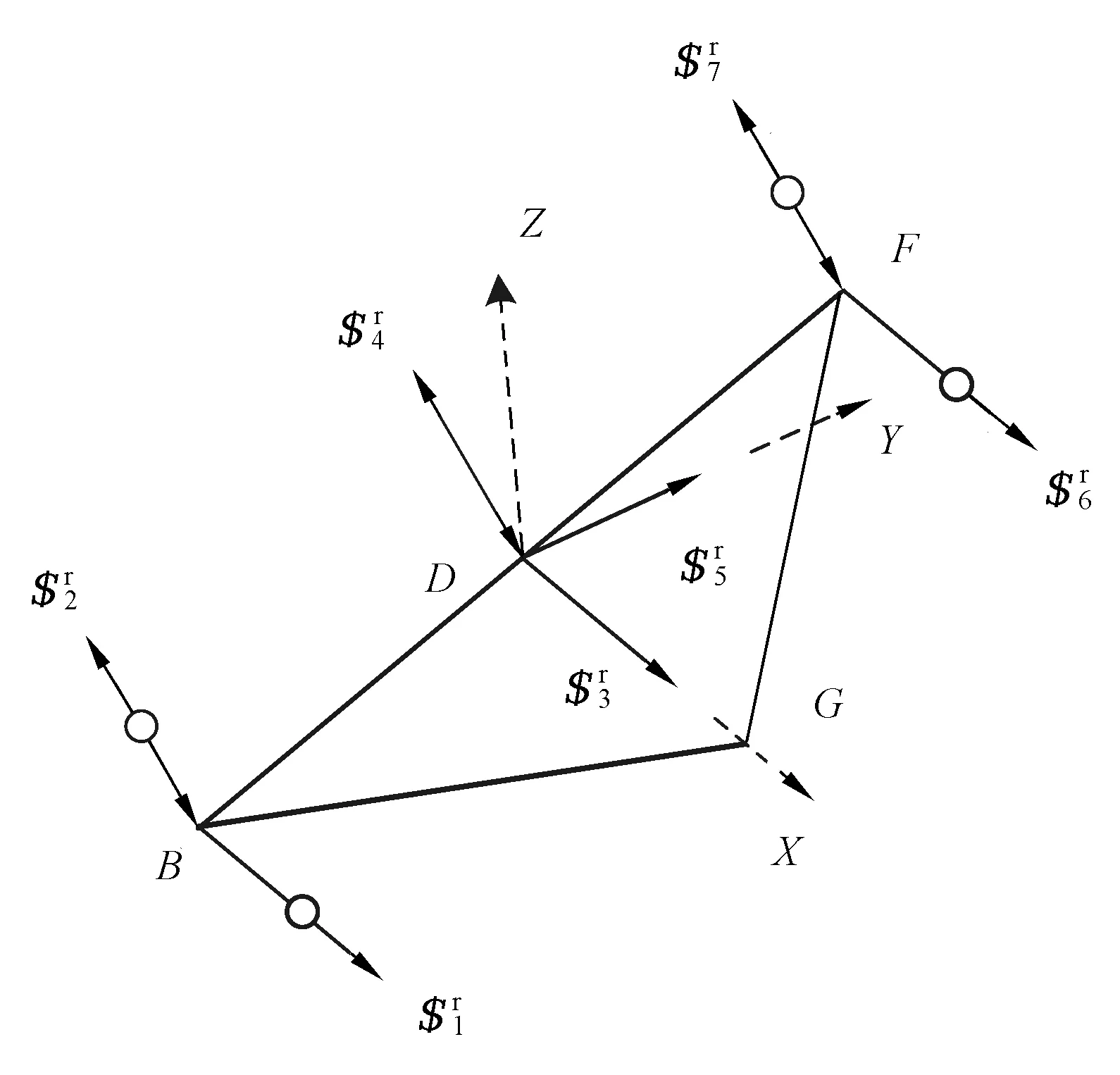
图3 动平台的约束螺旋系Fig.3 The constraint spiral of the moving platform
两个独立的约束力限制了X轴和Y轴两个方向的移动,一个约束力偶限制了绕Z轴的转动,因此机构具有2R1T自由度。通过运动全周性判别可知该机构自由度具有全周性。
机构的2个转动轴线分别位于动平台上的BF、DG直线上,随着动平台位姿变化,这2条转轴始终与2个独立的力线矢共面,且与1个独立的力偶垂直。因此,这2条转轴为连续转轴,且垂直相交于动平台的中心。
3 模拟平台构型设计
在基本构型2RPU-PU-UPS的基础上,根据越野车发动机动态测试实际需求对模拟平台进行构型设计。
1) 驱动副对称布置可以降低控制难度,增大承载能力,因此机构采用冗余驱动的方式,对称地添加一条无约束分支UPS,使5个支链分别布置于动平台中心与四角,形成2RPU-2UPS-PU机构。
2) 为了提高机构在竖直方向的承载能力,将PU分支作为主动驱动支链,并优化为剪叉机构,剪叉分支结构如图4所示。

图4 剪叉分支模型Fig.4 Shear fork model
剪叉分支是单自由度平面机构,其运动功能与P副相同,在RG处添加U副,使其一条轴线与转动副RG共轴。该分支与PU支链运动等效。
为进一步增大机构承载能力,在分支两侧对称添加驱动单元RPR分支,分支末端的行程是驱动单元的两倍,可知剪叉机构具有行程放大的功能。
设计的2UPS-2RPU-PU*机构结构如图5所示。
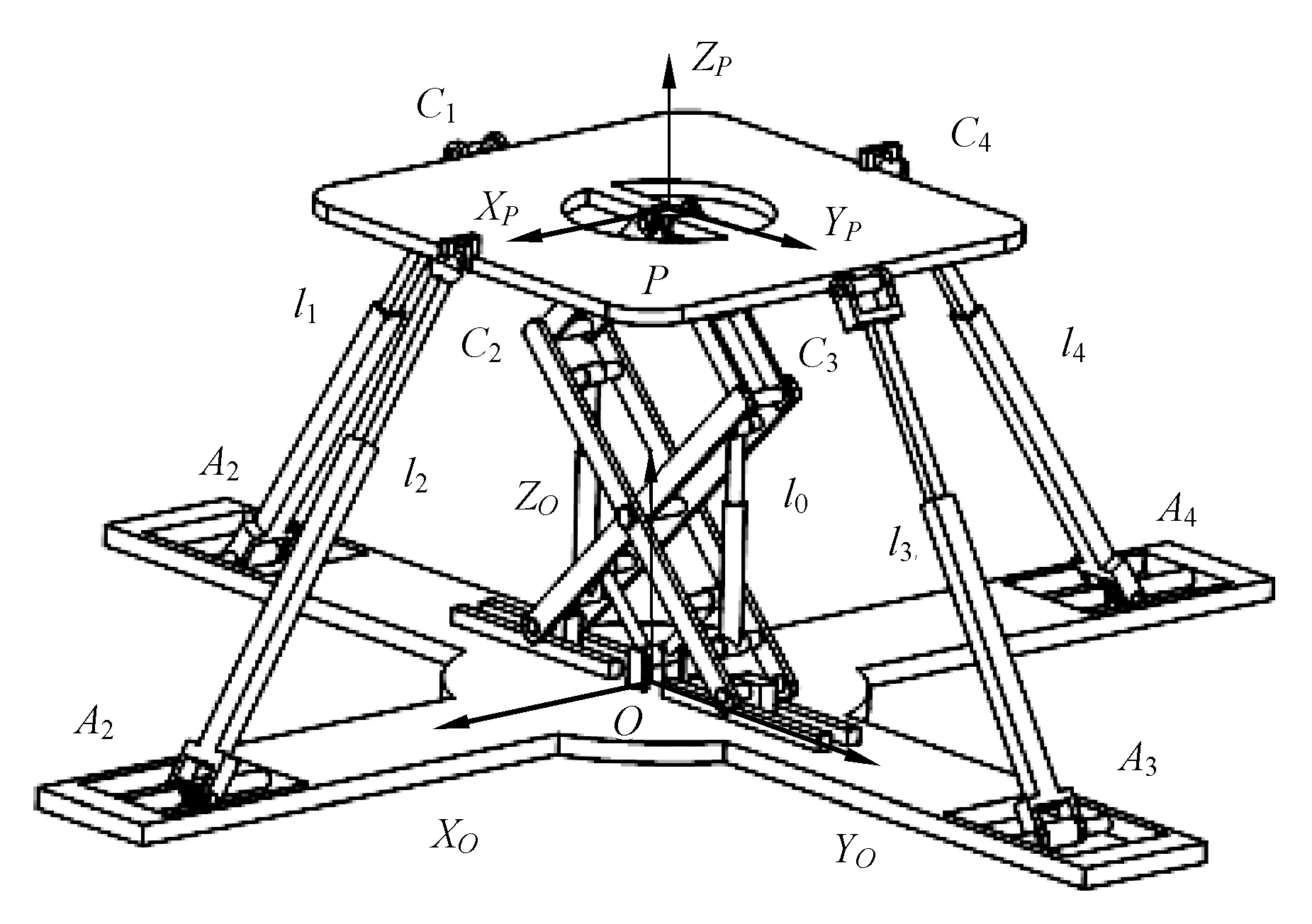
图5 2UPS-2RPU-PU*机构Fig.5 2UPS-2RPU-PU*mechanism
4 机构位置分析
4.1 位置反解
建立动坐标系P-XPYPZP与定坐标系O-XOYOZO,如图5所示。坐标系的原点P、O分别为PU*支链的两端,轴ZP和ZO分别垂直动、静平台向上,轴XP和XO分别沿PC2、OA2方向。5个驱动副的长度分别为l1、l2、l3、l4、l0。
上平台点Ci(i=1,2,3,4)在动系{P}中对应的位置矢量为
(5)
式中,r是点Ci到动平台中心的距离。

(6)
点P在固定坐标系{O}中的位置矢量为
OP=[0 0h]T,
(7)
式中,h为动平台中心到定平台中心的距离。


(8)
铰链点Ai在定系{O}中对应的位置矢量为

(9)
式中,di是Ai到定平台中心的距离,根据布置对称原则,设d1=d3=d2=d4=d。
以杆长为条件建立方程:
|OCi-OAi|=li,
(10)
l0=[0 0h]T,
(11)
式中,li(i=1,2,3,4)表示运动分支支撑杆对应的矢量。
根据机构的结构约束情况,分支A1C1、A3C3只能在平面A1OP内运动,故有以下几何关系:
OC1=OC3=0,
(12)

(13)
式中,l01,l02分别是剪叉分支的两个驱动杆长度。
4.2 位置正解
根据式(13)可得

(14)
根据辅助角公式,可解得

(15)


图6 正解多解位置Fig.6 Locations of positive multi-solution
将式(15)代入(13)的第一个杆长方程后可得关于α的一元方程,可以直接进行求解。
5 机构运动学分析
5.1 工作空间
设定2UPS-2RPU-PU*并联机构的尺寸,动平台半径为550 mm,定平台半径为1 145 mm,动平台和定平台之间的初始竖直方向距离为900 mm;转动副和虎克铰设定转角范围为(-60°,60°),球副转角范围为(-30°,30°);l1、l2、l3和l4设定有效行程为300 mm,l5有效行程为200 mm。
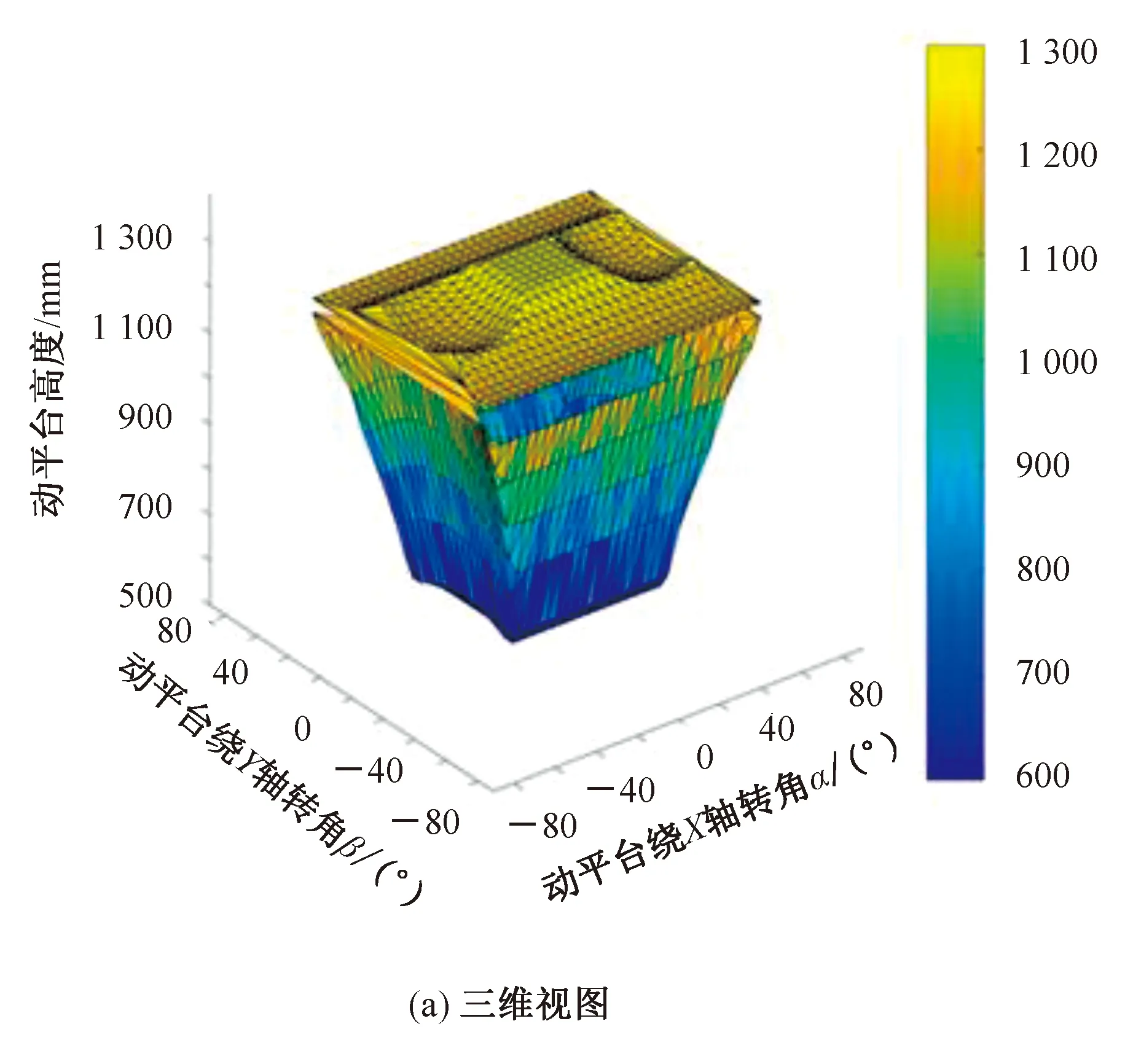
在综合考虑避免机构杆件干涉、转动副转动角度干涉以及驱动副长度干涉的条件下,利用MATLAB软件绘制机构的工作空间图,其结果如图7所示。
由图7可知,该机构工作空间形状近似为四棱台形,绕X轴的转角范围约为-50°~50°,绕Y轴的转角范围约为-50°~50°,沿Z轴的移动范围约为600~1 200 mm,上述运动范围满足越野车发动机动态测试实际需求。
5.2 机构奇异性5.2.1 运动学奇异
由于该机构为冗余驱动并联机构,l1与l3相关,l2与l4相关,为了便于分析奇异,首先根据式(13)反解对时间求导可得以中间分支、分支一、二的移动副为驱动的逆雅克比矩阵
(16)
利用det(J1)=0,可得未添加冗余分支UPS(分支二或分支四)时机构的奇异分布,如图8所示。

由图8(a)三维图可知当机构支链与动平台共面时,机构出现奇异。结合图8(b)俯视图可知,当机构β角为0时,高度处于600 mm、α=27.51°,及高度处于1 200 mm、α=46.24°时机构发生奇异;当机构α角为任意值时,高度处于600 mm、β=27.51°,及高度处于1 200 mm、β=46.24°时机构发生奇异,机构奇异位置的三维图如图9所示。但是,添加冗余支链UPS后,该机构为冗余驱动并联机构,当分支一移动副或分支二移动副与动平台共面而导致机构发生奇异时,分支三、四的移动副不与机构动平台共面,可以实现对机构的驱动,因此冗余驱动可以有效消除该类奇异,如图9所示。

5.2.2 约束奇异
机构输入与输出之间的映射关系为

(17)
其中,

(18)
式中,jij(i,j=1,2,3)可由数值微分法求解,如j11的计算公式为

(19)
式中,α(l0,l1,l2)为驱动杆长度分别为l0、l1、l2时α的值。
经计算,当且仅当h=0时,行列式det(JF)=0,即当动、定平台重合时,机构发生约束奇异,但由于实际结构限制,机构不会达到此位置。
综上所述,机构在工作空间内运动性能良好,不存在运动奇异和约束奇异。
6 结论
1) 本文根据越野车辆发动机动态测试需求,综合出一种基于新型2UPS-2RPU-PU*冗余驱动并联机构的模拟平台。该平台具有两个相交于动平台中心的连续转轴,能够实现惯性较小的连续转动。该平台为2R1T并联机构,能够实现发动机不同工况下的运动耦合,可以进行更加接近实际路况的动态测试。
2) 对机构进行了结构优化。对称地添加无约束分支,降低了机构的控制难度,提高了机构的承载能力;设计剪叉分支,提高了机构在竖直方向的承载能力,并放大了其行程,达到了模拟平台重载需求。
3) 推导了该机构的位置反解和正解的计算公式,并对该机构的工作空间和奇异性进行分析,表明该机构具有较大的转动范围,且运动性能良好,可以满足越野车辆发动机动态测试需求。这些都为该机构的进一步深入研究及在模拟器中的实际应用奠定了基础。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
军民两用技术与产品(2022年1期)2022-06-01
西北工业大学学报(2022年1期)2022-04-22
天津理工大学学报(2021年2期)2021-06-03
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
软件(2020年3期)2020-04-20
航空学报(2019年6期)2019-07-18
北京航空航天大学学报(2019年3期)2019-04-08
电子制作(2019年23期)2019-02-23
食品工业科技(2014年13期)2014-12-16