FSAC 赛车整车控制器硬件设计
2022-06-08 01:43廖兴华甘桦福
时代汽车 2022年12期
廖兴华 甘桦福
柳州铁道职业技术学院 广西柳州市 545000
1 引言
在疫情期间,以无人车开展无人快递、无人配送发挥了重要的作用。加上今年政府工作报告明确提出2030 年实现碳达峰,2060 年实现碳中和的具体时间要求。无人车的研发越来越受到相关企业和研究机构的重视,无人车大多是在新能源汽车基础上改造而来,对减少环境污染带来积极促进作用。作为无人车中核心关键零部件的整车控制器的开发也成为关注的重点。
2 FSAC 赛车架构
FSAC(中国大学生无人驾驶方程式大赛)由中国汽车工程学会从2017 年开始举办,由于疫情影响至今举办了3 届。FSAC赛车是由各高校大学生自行设计、制造、开发完成需满足大赛规则的赛车。。目的是让学生理论联系实际,全方位锻炼学生能力。
2.1 FSAC 赛车系统组成
FSAC 赛车包括感知系统、决策控制系统、底层控制系统三部分组成,如图1所示。
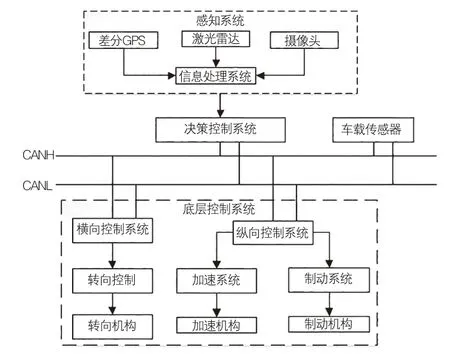
图1 FSAC 赛车系统组成
感知系统包括摄像头、激光雷达、GPS。感知系统和决策系统之间通过串口通信。决策系统与底层控制系统之间通过CAN 总线通讯。底层控制系统实现车辆线控转向、线控驱动和线控制动。
2.2 FSAC 赛车整车控制器设计
赛车整车控制器的硬件设计根据大赛规则和控制需求包括电源模块设计、输入输出接口设计、驱动电路设计、CAN 总线通讯设计等。设计的目标是能实现车辆的数据采集,对数据进行处理,输出控制信号实现车辆线控驱动、线控制动和线控转向。最后能圆满完成比赛任务。
根据《中国大学生方程式大赛规则》,绘制了整车控制器硬件功能框图,如图2 所示,主要包括无线模块、驾驶模式选择、上层控制器、AMI(无人驾驶系统任务指示器)、安全回路、报警指示灯、电机、传感器、电池管理系统等。底层车载传感器包括位移传感器、方向盘传感器、车速传感器等。传感器信号通过CAN 总线与整车控制器通讯。

图2 整车控制器硬件功能框图
无线模块用于对车辆进行遥控控制,采用2.4GHZ 通讯模块。上层控制器是对激光雷达、摄像头等进行控制,控制信号通过CAN 总线反馈给整车控制器,整车控制器再控制车辆运动。转向和制动的电机采用直流伺服电机,可以实现精准控制。转向电机用于控制车辆转向,制动电机用于推动制动主缸从而控制车辆减速。驱动电机控制车辆前进的速度。AMI(无人驾驶系统任务指示器) 根据规则用于选择赛车进行项目测试的状态。安全回路用于当赛车出现规则规定的情况,如:故障、漏电等时断开高压电。设计的整车控制器如图3 所示。
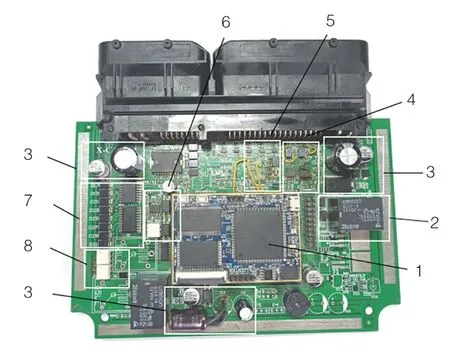
图3 整车控制器
3 主芯片选择
由于无人方程式赛车控制需求复杂,需要一款性能优良的芯片。因此采用意法半导体公司的高端芯片STM32F767 型号,如图4 所示。它的硬件资源十分丰富,包括110 个IO 口,多路串口、2 路CAN 通信、自带AD/DA 转换,完全可以满足要求。:

图4 核心板结构
4 电源模块
无人车上所需电源有12V,5V,3.3V。其中12V 电压用于报警指示灯、电源开关、制动电机等用电设备。5V 电压用于制动位移传感器、转向角度传感器等供电。由于控制器的主控芯片采用意法半导体公司的STM32F7 芯片,是3.3V 供电。采用电压转换芯片LM2596 把12V 转换成5V,电源设计采用常用LC 滤波电路,2 级管保护电路。用AMS1085-3.3V 将5V 转换成单片机所需的3.3V 电压,外围电路根据经验采用一个100uF 的极性电容储能滤低频波和三个瓷片电容来滤高频波。如图5 所示。
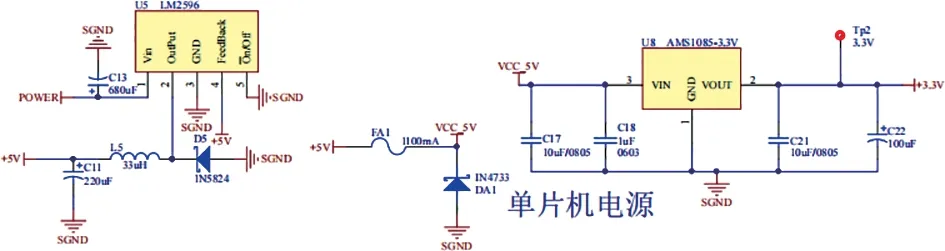
图5 电源模块原理图
5 I/O 接口
I/O 接口必须预留足够,以便后期增减,根据大赛规则,整理的图2 中的控制器功能框图可知,整车控制器的I/O 接口包括,转向的角度传感器信号输入和输出转向角度需要一个输入和输出即2 个接口,制动位移传感器信号输入,输出制动距离2个接口,油门传感器输入,输出速度2 个接口,传感器的接地接口3 个。安全回路输入和输出2 个接口,AMI(无人驾驶系统任务指示器)包括直线加速测试、8 字绕环测试、高速循迹追踪测试、紧急制动系统测试、检测5 个接口。无人指示灯状态控制需要3 个接口,12V、5V、3.3V 电源的接口每个留2 个正负接口需要12 个接口。两路CAN 通讯接口,驾驶模式选择3 个接口,共需要34 个接口,设计时至少预留40个接口。
6 AD/DA 模块
油门信号、制动信号是通过油门传感器、位移传感器发送模拟量至整车控制器,然后控制器经过AD/DA 转换成模拟信号控制赛车加速和制动。AD 转换部分电路如图6 所示:
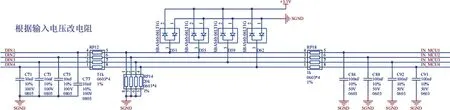
图6 AD/DA 部分原理图
将12V 电源的信号如指示灯转换成单片机可接收的3.3V 信号,然后经过单片机自带ADC 转换成数字信号给控制器。最后控制器经过DAC 输出信号。DA 转换用DAC7512 芯片,如图7 所示。
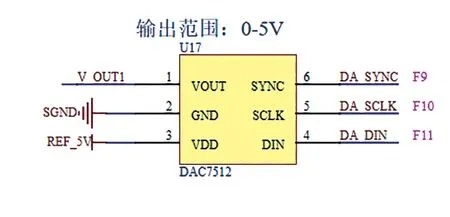
图7 DA 转换芯片原理图
7 CAN 通讯模块
VCU 应该至少设计两路CAN 通讯接口,CAN 通讯接口可以实现VCU 和MCU、BMS 的通信。因为无人车相比纯电动车多了环境感知的信号,控制功能复杂。
CAN 芯片采用常用的TJA1050 芯片,本控制器设置了两路CAN,CAN1 用于各种传感器数据读取和监测,CAN2 用于车辆的运动控制,将转向角度,制动距离、车速数据通过CAN 通讯传输控制。
其电路原理图如图8 所示。TJA1050的RXD 和TXD分别接芯片的PA11 和PA12 引脚,CANH 和CANL 采用电感和电阻滤波,加上120 欧终端电阻CAN 总线就能正常工作了。赛车的转向柱上安装有转角传感器,传感器采用CAN 总线通讯方式,当发生转向时就能检测到转动的角度信息发送给整车控制器。

图8 CAN 外围电路
8 高边驱动
所有需要VCU 控制输出12V 电源的采用高边驱动实现。比如指示灯等。高边驱动芯片选择BTS724G 芯片,它有四个输入和输出端口,可以同时控制4 路输入输出,每路输出都设计了一个稳压二极管保证输出电压稳定。如图9 所示。

图9 驱动电路原理图
9 其他电路
9.1 RES(遥控急停)电路
根据规则,无人车需要具备断电触发和遥控急停功能,即当车辆在无人驾驶状态下,RES 发生意外断电或者当遥控急停按钮被按下时,车辆将自动触发安全回路断开高压电。电路设计由一个继电器、一个二极管和一个NPN 型三极管组成。根据规则,RES 必须串联进安全回路才能当RES被触发时断开高压电。电路中标号AQHLJ和AQHLC 分别表示安全回路输入和输出引脚。电路的工作原理是当RES 被按下或断电时,RELEASE 引脚输出高电平,三极管导通,继电器线圈通电,则原来的常闭触点断开即安全回路断开,常开触点闭合,从而实现断开安全回路的目的,如图10 所示。
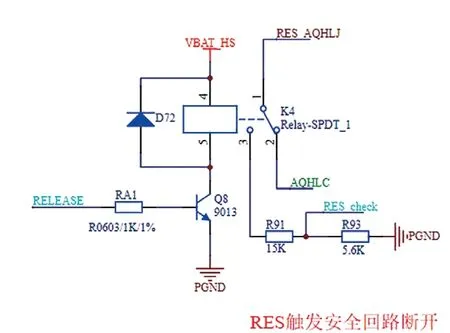
图10 遥控急停电路
9.2 可视性检查电路
根据规则,当无人车打开低压开关时,IMD(绝缘检测)和AMS(电池管理系统)指示灯必须亮1-3 秒进行可视性检查。电路设计采用一个固态继电器G3VM21HR和两个电阻实现,ZPA3 接单片机引脚。电路工作原理是当低压开关打开,程序控制单片机引脚ZPA3 输出高电平3 秒给固态继电器1 号脚,5 号脚输出5V 给可视性检查供电。如图11 所示。

图11 可视性检查电路
9.3 启动蜂鸣器电路

图12 启动蜂鸣器电路
10 实车验证
对设计的整车控制器进行了实车验证,验证的场地选取和赛场相似的良好水泥路面,验证赛车在低速情况下行驶S 路径的跟踪效果。结果显示所设计的控制器能快速准确地响应控制需求,赛车在低速下跟踪良好,满足设计要求。如13 所示。

图13 实车验证
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年12期)2022-07-05
中国自行车(2022年3期)2022-06-30
学苑创造·A版(2022年6期)2022-06-20
汽车实用技术(2022年5期)2022-04-02
当代化工(2020年4期)2020-08-24
网络空间安全(2019年8期)2019-03-18
名人传记·财富人物(2016年9期)2016-11-10
名人传记·财富人物(2016年9期)2016-11-10