铲运机智能控制系统研究
2022-06-06 01:52姜中晔
中国资源综合利用 2022年5期
沈 波,刘 旭,姜中晔
(1.新疆喀拉通克矿业有限责任公司,新疆 富蕴 836107;2.矿冶科技集团有限公司;3.金属矿山智能开采技术北京市重点实验室;4.北矿智能科技有限公司,北京 100160)
当前,矿山井下电动铲运机大多采用手动操作方式,铲运机驾驶人员长期处于恶劣的井下作业环境,具有一定的安全风险,不利于矿山企业安全防控工作的开展;矿山井下采场的作业面爆破后,炮烟等有毒有害气体无法快速消散,导致有效生产时间较少,不利于矿山企业生产效率的提高;井下铲装作业缺乏准确的计量和统计分析手段,不利于矿山企业的综合管控;井下铲装运作业缺乏有效的调度手段,不利于矿山井下铲运机、破碎锤、卡车等多装备的协同作业。为提高电动铲运机生产效率,降低铲运作业的劳动强度与安全风险,减少职业病对驾驶员的影响,矿山急需开展铲运作业的智能化研究。根据《中国制造2025》要求,随着5G 通信网络的普及应用,将无人驾驶技术、物联网技术应用到铲运机智能化控制上已成为现实[1]。本文设计一套适用于地下金属矿山的智能铲运机系统,并对其中关键技术进行分析。
1 铲运机智能控制系统架构
铲运机智能控制系统由高速网络系统、自动控制系统、视频监控系统、状态监测系统、计量系统、智能控制平台、智能配矿系统和安全避障机制八个部分组成,可为金属矿山企业构建地下智能化铲装运作业体系提供参考。其中,井下铲运机智能化改造包括安装通信模组、视频监控模组、重量感知模组、状态监测模组和安全避障模组,地表控制平台集成控制、配矿、状态分析等模块[2]。智能铲运机车体架构如图1 所示。

图1 智能铲运机车体架构
2 系统组成分析
2.1 高速网络系统
由于矿山生产作业环境复杂,故而铲运机智能控制系统需要可靠、稳定、迅捷的传输网络,因此将5G 网络+万兆光纤环网相结合,作为铲运机智能控制系统的通信手段。在铲运机高速网络系统建设过程中,首先在井下铲运机行驶路线增加5G 发射基站,使铲运机行驶路线实现5G 网络全覆盖,其次在车体上增加5G 信号接收器,使之能够与矿井5G 网络实现数据通信。地面集控中心与铲运机可编程逻辑控制器(PLC)终端之间设立通信检测机制,实时监测设备间的通信状态,出现异常时,设备动作机构自锁并提示监控人员处理异常状况。
为保证井下通信网络的可靠性,在高速网络系统建设中采用链路聚合技术,增加矿山网络线路的冗余功能。同时,高速网络系统采用相互独立的三层网络结构,从而解决铲运机智能控制系统控制信号与监控信号在传输过程中出现的数据延迟、图像卡顿等问题。铲运机智能控制系统高速网络系统的网络传输质量如表1 所示。
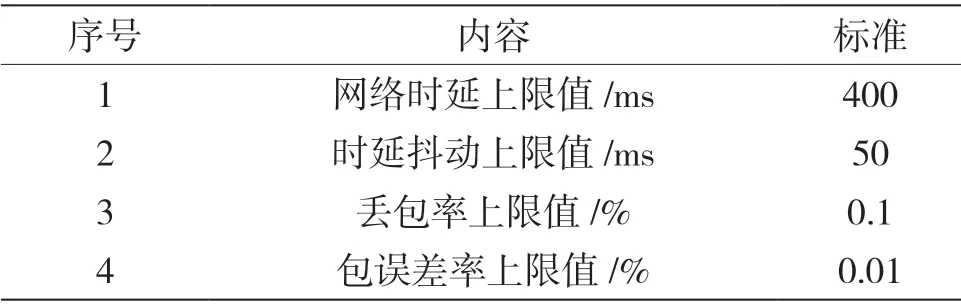
表1 网络传输质量
2.2 自动控制系统
铲运机智能控制系统具备三级控制模式,即自动驾驶模式、远程遥控模式和人工驾驶模式。铲运机智能控制系统通过控制逻辑关系实现自动驾驶、远程遥控驾驶与现场驾驶的切换。其中,人工驾驶模式优先级高于远程遥控模式及自动驾驶模式,保证控制系统异常时井下安全巡检人员可以及时接管车辆,排查台车的异常状况。
一是电气控制改造。对铲运机进行电气系统改造,从而实现铲运机的基本作业控制,如柴油机启动停机预热、车辆照明、鸣笛、铲斗举升翻转。利用机载工控机实现装备作业信息与指挥中心的实时交互以及装备的自动化控制。同时,将PLC 作为现场设备信息采集与控制核心,利用PLC 实现铲运机执行元器件控制,如停送电、行车、铲装、卸载、仪表采集、电机控制等[3]。二是液压控制改造。对铲运机液压系统进行改造,利用电液控制阀等使铲运机的液压系统符合PLC 控制逻辑,最终实现对行车、大臂升降、铲斗翻转等的控制[4]。
2.3 视频监控系统
在铲运机首尾增设全景网络高清智能球机,从而实现铲装作业过程实时监控,包括铲装作业范围内区域入侵、越界、进入区域、离开区域等行为的检测,从而解决铲运机无人作业过程中存在的安全管控问题。操作人员通过视频监控系统还可实现铲运机远程可视化遥控作业。
2.4 状态监测系统
在铲运机上加装液压、液位、温度、电压、电流、转速、速度等传感器,实时采集铲运机时速、发动机转速、水位、润滑油油温等信息,实现液压举升系统、液压制动系统、液压转向系统等的实时状态监测与数据信息统计,同时,将采集的数据融入企业数据库中,利用神经网络等技术,深入挖掘数据信息,从而实现铲运机历史数据趋势展示、故障诊断、预维护,进而实现铲运机的全生命周期管理。该系统还可以实现铲运机备品备件、报废等的超前管理,进而降低企业生产运营成本,简化企业生产运营管理程序。
2.5 计量系统
在铲运机车斗上安装质量传感器,通过车斗内载物质量的变化实现矿石装载量的计量。计量系统能够将每斗矿石与采场、溜井、操作人员相挂钩,一次称重便可分别针对铲运机、操作员、采场和溜井进行考核。计量系统功能如表2 所示。
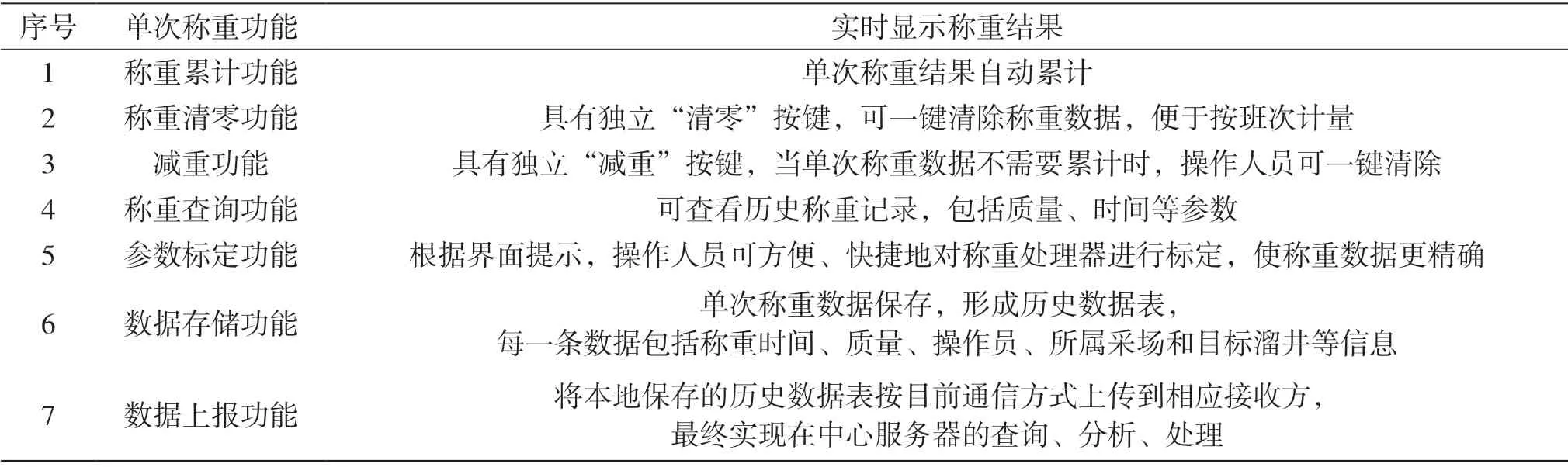
表2 计量系统功能
2.6 智能控制平台
如图2 所示,智能控制平台由遥控座椅、液晶显示屏和视频处理系统等组成。遥控座椅采用一体式设计,座椅和操作扶手集成在一起,座椅的左右扶手各设置了一个操作手柄和多个操作按钮,实现车辆的各种操控动作。液晶显示屏可以显示车辆前后的视频影像,配对的高清摄像头能清晰地呈现铲运机前后方的图像,方便操作人员观察装载机周围的情况,实现远程操控[5]。

图2 铲运机智能控制平台
2.7 智能配矿系统
在铲运机智能控制平台上集成智能配矿系统。智能配矿系统可根据现场的实际要求自动调整卡车和铲运机配比,也可以对已指派车辆的调度目标进行实时更改,以适应现场生产情况的突变。在调度指挥过程中,若车辆故障、道路变化等因素导致部分环节执行迟滞或中断时,系统能够自动做出动态调整。
2.8 安全避障机制
在铲运机周身安装测距雷达,该雷达用于铲运机周围环境信息的探测,当测距雷达监测到障碍物或者误入作业区人员时,向地面操作人员报警。当铲运机与障碍物的距离超过设定的安全界限阈值后,铲运机自动控制系统实行紧急制动,并提示操作人员处理异常状况。
3 结论
本文提出一种基于绿色智能矿山生产体系的铲运机智能控制系统,利用大数据分析、人工智能(AI)识别、5G 网络、无人驾驶等先进技术实现井下铲运机铲运作业的智能化管控。经工业试验验证,铲运机智能控制系统能够实现无人驾驶、视频监控、状态监测、自动计量、智能配矿和安全避障等功能,为矿山安全生产的绿色化、智能化发展提供技术支持,对保障矿山生产安全起到重要支撑作用。
猜你喜欢
商品与质量(2021年43期)2022-01-18
天然气与石油(2021年5期)2021-11-06
河北地质(2021年2期)2021-08-21
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
矿产勘查(2020年7期)2020-12-25
四川大学学报(自然科学版)(2020年2期)2020-04-01
中国交通信息化(2019年7期)2019-10-08
消费导刊(2017年24期)2018-01-31
军事运筹与系统工程(2017年1期)2017-07-31