观光车避撞行人的AEB 算法优化研究
2022-06-04 06:41秦少威郭启薪王春龙
装备制造技术 2022年2期
黄 好,秦少威,郭启薪,王春龙
(柳州五菱新能源汽车有限公司,广西 柳州 545007)
0 引言
观光车属于我国的特种设备,是场(厂)内专用机动车辆,而专用机动车辆与行人相撞的交通事故逐年增加,而自动紧急制动系统(AEB,Autonomous Emergency Braking)可以避免27%的碰撞事故[1]。通过双目摄像头和毫米波雷达采集行人信息进行处理,计算出观光车与行人的安全状态。当观光车前方出现行人,造成安全隐患时,观光车AEB 紧急制动系统首先会对驾驶员发出警报信号提醒驾驶员采取制动措施,若驾驶员没有踩下刹车进行制动,则预警系统将对车辆行驶状态进行控制,因此开展观光车AEB 避撞行人算法研究具有重要的意义。
在AEB 避撞行人算法上,普遍采用的指标为碰撞时间[2](Time to Collision,TTC),进而构建风险评估模型,由风险评估模型确定观光车行车过程中不同路况下的信号触发机制,根据不同的道路工况划分不同的风险等级。利用风险评估确定危险系数,从而确定观光车的行车状态和预判行人行走状态以避撞行人。例如,杨为等[3]通过车辆的逆动力学模型,运用遗传算法优化了AEB 系统TTC 算法;何霞等[4]研究AEB 系统控制策略中触发宽度对行人横穿场景结果的影响,通过设计AEB 纵向控制算法模拟行人横穿危险场景,不断调整触发宽度;Shimizu 等[5]针对车辆行驶过程中可能突然遇到行人窜出的危险场景,设计出了一种基于行车-行人碰撞速度的风险量化数学模型。郑刚等[6]利用正交实验法及聚类分析法对不同驾驶员进行分类,拟合不同类别驾驶员的反应时间与驾驶速度之间的关系曲线,并将其应用于报警及制动阈值的修正,优化了汽车的自动紧急制动系统。以上研究主要针对汽车的实际运行环境来优化AEB 算法,但由于观光园区的道路非常简易,路窄弯急,人车混流现象严重,观光车与行人的相对速度、相对减速度及相对距离不断变化,汽车的AEB 系统避撞行人算法在观光园区内不能很好适应。
考虑观光车与行人目标物的纵向相对距离及相对加速度的影响,利用TTC 碰撞时间算法建立三个观光车行人避撞预警等级,分别为玉级行驶安全级,Ⅱ级碰撞预警级和Ⅲ级碰撞危险级;根据不同车速下观光车的实际制动过程,设置不同的冗余安全距离,得到观光车AEB 行人避撞的制动安全阈值,优化了观光车行人避撞的AEB 算法,并通过实例验证。
1 观光车AEB 行人避撞的TTC 算法
观光车AEB 系统以传感器检测技术为基础,对周围路况进行信息采集处理,根据处理的数据信息辅助驾驶员判断对车辆前方行人及障碍物,提高驾驶员的安全驾驶能力,进一步保障观光车与路况行人的安全[7]。系统将毫米波雷达传感器收集到的行人信息(行人的初速度,行人的相对距离)发送到观光车系统控制器,控制器通过控制单元对行人的状态信息进行分析处理和预判。当系统内控制单元判断出自车与前方行人有碰撞风险时,系统发出预警报警信号,当观光车与行人相对距离小于最小安全距离时,系统主动控制车辆进行制动减速,避免撞到前方行人。
目前观光车AEB 的风险评估模型有安全距离算法模型和碰撞时间算法模型两类,但安全距离算法模型由于涉及了大量的数据信息,计算过程比较繁杂,故采用碰撞时间算法模型。碰撞时间算法模型TTC是指以某一特定时刻为开始,驾驶员在驾驶过程中,遇到紧急情况时紧急制动发生到紧急制动结束,这一过程中避免碰撞发生时间。观光车AEB 避撞行人策略的研究对象主要为观光车与行人,当计算出来的距离碰撞时间TTC 越大,表明观光车行车越安全,碰撞危险系数越低;若距离碰撞时间TTC 越小,则表明观光车行车越危险,危险系数越大。
根据车辆与行人碰撞时间的原理,考虑观光车与行人目标物的纵向相对距离及相对加速度的影响,则观光车AEB 行人避撞的TTC 算法为:
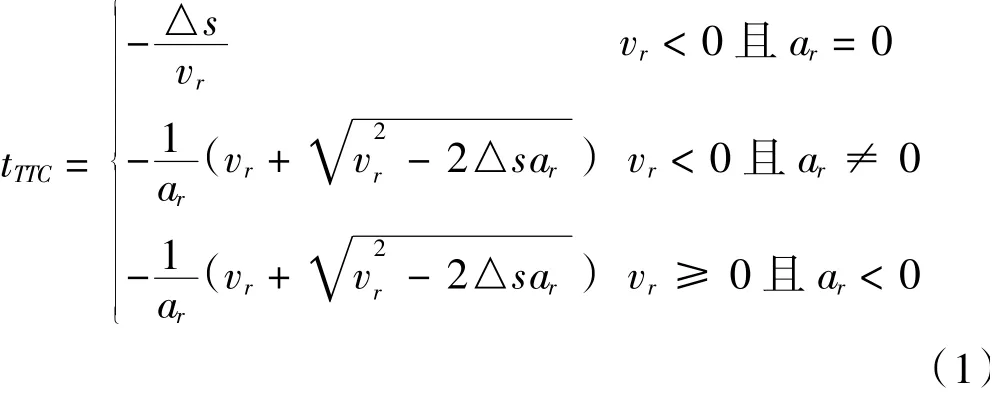
式中,tTTC为距离碰撞时间,△s为观光车与行人的纵向相对距离,vr、ar分别为两者的相对速度和相对加速度。
利用TTC 碰撞时间算法建立3 个观光车行人避撞预警等级,分别为玉级行驶安全级,Ⅱ级碰撞预警级和Ⅲ级碰撞危险级,其中玉级表示观光车前方无行人障碍物或行人障碍物在安全距离外,Ⅱ级表示观光车有可能会碰撞到前方的行人,Ⅲ级表示AEB 系统发出自动紧急制动信号以避免碰撞到车辆前方行人。对于不同的观光车行驶状态以及行人行走状态,基于分级预警算法对整个安全系统进行了安全等级划分,观光车避撞行人安全等级划分如图1 所示。

图1 观光车避撞行人安全等级划分
由于观光车开始紧急制动后,观光车与行人的相对速度、相对减速度及相对距离不断变化,算法越来越复杂,TTC 预警碰撞风险评估模型有可能会出现误判的情况。因此,需要对观光车的行车紧急制动进行优化研究,提高TTC 算法的可靠性。
对观光车AEB 行人避撞系统的工作区域进行划分,划分区域如图2 所示。
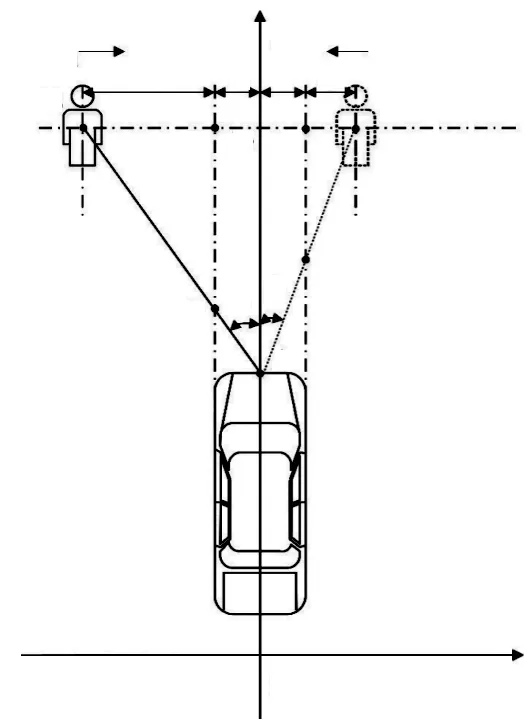
图2 AEB 行人避撞系统工作区域划分
由图2 可知,若行人与观光车距离足够近的时候,观光车AEB 行人避撞系统可能有3 种状态:闭合、待工作、激活状态。若行人处在BCG 或EFH 区域,且v1≠0 或v2≠0 ,AEB 避撞行人系统将处于待工作状态,此时的风险评估模型不会发出任何控制信号,系统将以图像等形式提示驾驶员注意行人安全。若行人处在AECGH 区域,不管行人处于什么运动状态,AEB 避撞行人系统将被激活,此时,风险评估模型将会发出行人碰撞预警或自动紧急制动信号。
2 考虑制动过程的AEB行人避撞优化算法
为了避免由于TTC 模型的局限性而造成失效,在Ⅲ级碰撞危险级的情况下,此时行人距离观光车已经很近,车辆的制动安全距离=响应距离+制动距离+冗余安全距离[8-9]。响应距离是指驾驶员发现横穿行人到采取制动之前的车辆行驶距离。冗余安全距离则表示为观光车完成紧急制动停止后,车辆自身与行人之间的距离。制动距离指车辆制动器由开始制动响应到减速度线性增长的制动距离,制动距离指观光车在制动过程中,减速度恒定,一直到速度为0 的制动距离。
为了明确各三级预警系统分级,利用预警分级算法间算出TTC 碰撞时间并进行区间划分。Ⅱ级预警的报警时间长短对于观光车AEB 行人避撞系统而言及其重要,它影响着系统的可行度和是否对行人避撞成功。在Ⅱ级预警的过程中,如若系统预警时间太过于短,则有可能会造成驾驶员来不及反应,那么这样将起不到需要的预警效果。如果Ⅱ级预警时间过长,有过能会对驾驶员的正常驾驶造成干扰,甚至加深驾驶员对系统的不信任,也会带来负面效果。因此,Ⅱ级预警的预警时长应该符合实际情况。为了确定一个合理的预警时间,需要对观光车的紧急制动过程进行详细的分析。
为了精确计算车辆的制动安全距离,需要考虑观光车紧急制动过程,其中驾驶员反应时间由驾驶员收到制动信息的时间和驾驶员执行制动动作的时间组成,一般驾驶员反应时间为0.3 ~1.0 s;制动器作用时间由制动器间隙时间和制动器动力增长过程时间组成,一般制动器作用时间为0.2~0.9 s。假设在制动过程中减速度恒定,则观光车制动安全距离d为:
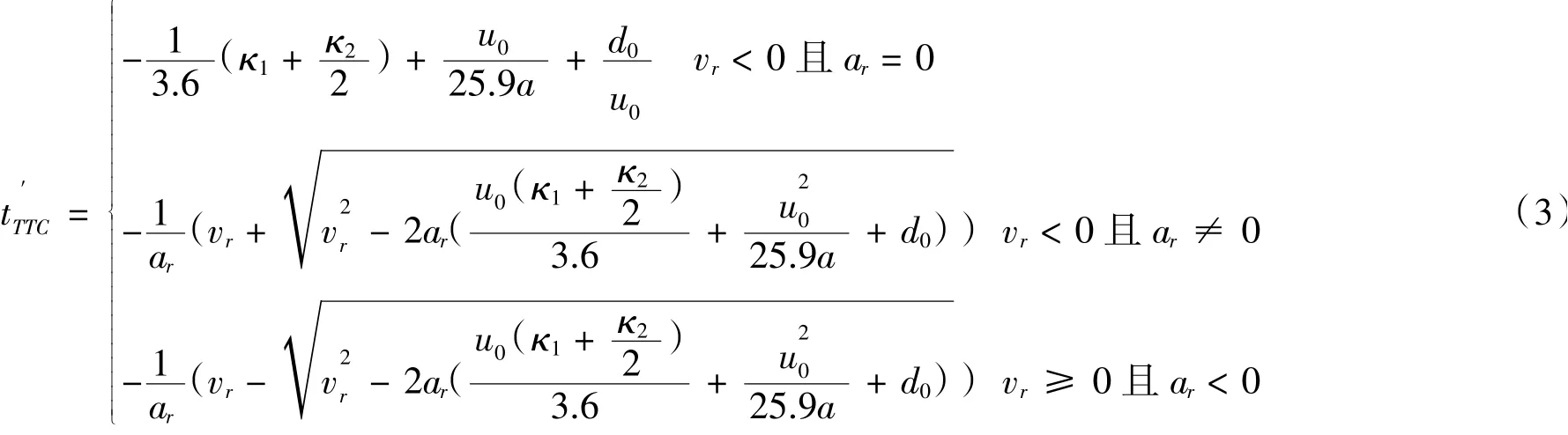
式中,u0为观光车初始速度;κ1、κ2分别为制动器间隙时间和持续制动时间;a为制动减速度;d0为冗余安全距离,根据不同的测试工况,可设置了不同的行人冗余安全距离,d0可取1.5 ~2 m,随着观光车的初始速度变高,观光车与行人之间的冗余安全距离也会随之相应增大。 将式(2)带入式(1)得到观光车AEB行人避撞的优化算法为:
3 案例分析
选取某车型的观光车为例,观光车与人形目标纵向距离为40 m,分别以15 km/h、20 km/h、25 km/h 和30 km/h 的车速进行测试,行人为静止状态。四种工况下的冗余安全距离分别为1.5 m、1.8 m、1.9 m 和2.0 m,每种工况的风险评估模型进行6 次测试,根据制动信号得到玉级和Ⅱ级、Ⅱ级和Ⅲ级碰撞危险级的分界测试值,并根据式(3)可以得到各级碰撞危险级的分界理论值,见表1。

表1 观光车各级碰撞危险级的分界值
观光车避撞行人算法以车辆制动安全距离理论为基础,确定了不同安全等级下TTC 区间取值范围,根据车辆初速度划分TTC 的取值范围和对应等级安全,其中15 km/h、20 km/h、25 km/h 和30 km/h 的车速下,Ⅲ级碰撞危险级的理论值分别为1.06、1.08、1.20 和1.48。在各级碰撞危险级下根据不同的车速计算出不同的冗余安全距离,得到不同车速下观光车AEB 行人避撞的制动安全阈值,建立的观光车避撞行人的AEB 算法更加合理。由表1 可以看出,随着测速得增加,各级碰撞危险级的分界值也不断增加,当观光车的速度为30 km/h 时,各级分界测试值和理论值之间的误差分别为0.21 s、0.17 s,均在误差的允许范围内,且在测试过程中预警信号的发出和自动紧急制动的执行皆符合系统要求,风险评估模型对行车过程中危险系数评估和碰撞安全等级的划分都准确无误。
4 结论
利用TTC 碰撞时间算法建立三个观光车行人避撞预警等级,考虑了制动过程中观光车与行人的相对速度、相对减速度及相对距离不断变化,得到观光车AEB 行人避撞的制动安全阈值,利用AEB 风险评估模型和分级预警算法建立一个针对观光车在不同工况下避撞行人的预警系统。通过实例计算得到:
(1)考虑观光车与行人目标物的纵向相对距离及相对加速度的影响,利用TTC 碰撞时间算法建立三个观光车行人避撞预警等级,观光车避撞行人的AEB算法更加合理。
(2)根据不同的测试工况,改进的观光车AEB 行人避撞系统设置了不同的冗余安全距离,得到不同车速下观光车AEB 行人避撞的制动安全阈值,提高了AEB 系统的稳定性。
(3)根据车辆初速度划分TTC 的取值范围和对应等级安全,在不同车速的行驶工况下,观光车AEB 行人避撞系统的预警模块均表现正常,在测试过程中并未出现系统错误报警的情况,没有干扰到驾驶员的正常行驶。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
包装工程(2022年1期)2022-01-26
意林原创版(2021年7期)2021-08-03
意林(2021年5期)2021-04-18
活力(2019年22期)2019-03-16
扬子江(2019年1期)2019-03-08
小天使·一年级语数英综合(2017年6期)2017-06-07
汽车与安全(2016年5期)2016-12-01