巡飞弹电子安全系统程序设计与仿真
2022-06-04 11:29:26李少卿彭志凌赵河明
兵器装备工程学报 2022年5期
李少卿,彭志凌,赵河明,杨 煜,夏 禹,王 英
(中北大学 机电工程学院, 太原 030051)
1 引言
未来战争是信息化的战争,全面精准地监控打击有效目标是取得战争胜利的重要因素。巡飞弹基于无人机技术与巡航导弹技术的快速发展,体现出优秀的精确打击与巡查等自主协同作战能力,在以色列黎以冲突、亚美尼亚阿塞拜疆纳卡问题中均发挥出极大作用。巡飞弹作为一种体积与质量较小的新型武器,发射过载低,常规曲折槽后坐保险机构与双自由度后座保险机构难以识别有效信息,而较为精准的钟表式后坐保险机构又因体积大结构复杂难以满足作战要求,因此我国巡飞弹技术进步的关键之处,就在于如何实现搭载引信的小型化、智能化。
引信电子安全系统即电子安全与解除保险装置(electronic safety and arming devices,ESAD)是由美国海瑞·戴蒙德实验室和桑迪亚实验室合作研究出的一种新型安全起爆系统,集成微电子技术与高能起爆技术于一体,具有小型化、信息化、智能化、可靠性高等优点。本文借助引信电子安全系统逻辑设计思路与攻击型巡飞弹实际作用环境,提出一种保障安全性、可靠性的程序控制逻辑,实现环境激励同电子安全系统良好高效的结合。
2 程控系统顶层设计
2.1 系统结构设计
为保证巡飞弹高费效比的优点,同时实现系统抗干扰、冲击及可靠工作的能力,设计3个保险开关,其布局沿用电子安全系统的经典布局方式:2个静态开关分别控制电源与电路地线,而动态开关控制高压转换电路,该布局方式能够有效的避免两静态开关因串联不隔断电源只隔断地线的单点失效;同时,根据GJB373A—97引信安全设计准测,设计两套独立的控制电路,将3个保险开关分置其上,采用“阈值+时间窗+顺序”的控制思路,通过结合3个环境信号的幅值、时间与出现的先后顺序控制3个开关的闭合,进而实现冗余保险、时序保险、延期解保等功能。
程序控制原理如图1所示。

图1 程序控制原理框图
2.2 环境解保激励选择
选取合适的解保环境信息通常是保障弹药能够有效打击目标和保护我方人员安全的决定性因素。故本电子安全系统设计的一个重点就在于:如何筛选出攻击型巡飞弹作用过程中安全、可靠且具有唯一性的环境信息,并且,选取的环境信息还应具备齐次性、独立增量性、普通性的特点,以实现当环境激励出现时系统就要做出响应,直至部分或全部解除保险。
1) 第一级系统解除保险激励,环境信号1——机翼展开信号。巡飞弹发射出膛后通常迅速展开折叠机翼组件或为充气翼充气,随后借助动力装置爬升至巡飞高度,这一阶段通常命名为发射与爬升阶段。其过程相较于普通导弹来说发射后坐过载极小,且展开机翼后无法旋转,因此可将电子安全系统中的常采用的过载信号与扭矩信号替换为机翼展开信号,此信号具有巡飞弹发射升空的显著特点,具有唯一性,且便于系统识别。
2) 第二级系统解除保险激励,环境信号2——俯冲速度信号。世界各国典型巡飞弹通常可在目标区域上空进行巡飞寻找目标。以以色列黛利拉巡飞弹为例,巡飞时间一般大于20 min,巡飞半径10 km,巡飞速度367~856 km/h,发现目标后从8 km上空俯冲打击目标,末端俯冲马赫数到达0.85。因此可将系统发现目标后的俯冲速度信号作为第二级保险解除激励,既有效保证巡飞弹巡飞过程中引信处于保险位置,又避免了第二级保险过早打开引起的能量浪费与意外发火情况。
3) 第三级系统解除保险激励,环境信号3——接近目标区域时弹载计算机给出解保信号,目标信号。电子安全系统的起爆原理是通过高压发火电容在短时间内放电,以瞬间大电流击穿冲击片雷管完成后续战斗部的起爆。但弹载电源一般为低压直流电源,要实现将低压直流电源的能量转化为高压电容的瞬时高压且在检测到起爆信号后迅速完成起爆,这就要求转换过程用时应尽量缩短,而临近目标区域再进行高压电路充电正满足需求,既能保证高压电路起爆要求又不会因充电时间过早造成电容电压下降无法击穿冲击片雷管。
2.3 系统工作时序及原理
主要工作流程为:① 巡飞弹发射前系统不带电,预发射时,程序控制系统上电完成初始化和系统自检;② 当巡飞弹发射时,T1时间窗内位置开关感应机翼展开状态,完全展开后环境信号1输入FPGA1,第一级保险静态开关K1解除;③ 巡飞弹到达巡飞高度后进行巡飞寻找目标;④ 发现目标后迅速从巡飞高度向地面目标俯冲,于时间窗T2内感应速度信号,随后信号2输入FPGA2,打开第二级保险静态开关K2;⑤ 接近目标区域时,弹上计算级发送解保信号,信号3输入FPGA2;FPGA1与FPGA2通过串口通信,结合信号1、信号2、信号3与起爆异常信号打开第三级保险动态开关K3;⑥ 高压发火电容开始充电,等待起爆信号到来;⑦ 收到系统的起爆信号后,高压发火电容迅速放电,引爆冲击片雷管;⑧ 若系统未能在规定时间窗内检测到系统环境信号或环境信号出现时序异常,引信进入绝火状态,自行失效。系统程序流程如图2所示。
图2 系统程序流程框图
3 系统软件设计
3.1 软件FPGA1设计
对于芯片FPGA1,应主要包含以下功能:首先可将外接晶振分频用作系统时钟;其次应存在第一个时间窗与环境信号1识别功能;最后则是对高压与起爆电路异常状态的反馈控制。
FPGA1输入信号包括:系统复位、有源晶振、环境信号1、静态开关K2反馈信号、高压反馈、起爆异常信号。
芯片FPGA1组成如图3所示。
FPGA1控制逻辑如下:复位电路控制整个系统的初始化;振荡器与时钟电路起分频作用,将集成有源晶振转为系统时钟驱动芯片时序;高压反馈与起爆异常识别负责检测高压电路与环境信号的状态,若两者都正常输出高电平,存在一个及以上的异常则为低电平;T1时间窗与环境信号1识别电路负责检测巡飞弹发射后的机翼展开信号,静态开关K1控制电路根据FPGA2馈入的静态开关K2信号、高压起爆异常信号、环境信号1共同控制静态开关K1 的闭合和断开。
图3 FPGA1组成框图
3.2 软件FPGA2设计
FPGA2的复位与系统时钟由FPGA1得来,芯片主要负责环境信号2、3的识别和高压发火电容的充放电,组成如图4所示。
图4 FPGA2组成框图
控制逻辑为:芯片接收到FPGA1中环境信号1无误后,T2时间窗电路产生识别环境信号2 的时间窗;在规定时间窗内出现环境信号2后,K2控制电路闭合静态开关K2;接近目标区域,T3时间窗电路产生时间窗,若环境信号3正常,则环境信号1、信号2、信号3、状态异常信号通过逻辑与门共同驱动动态开关K3闭合,为高压发火电容充电并使之维持在待激发状态;起爆控制电路通过目标识别信息发出起爆信号,引爆冲击片雷管,最终完成起爆任务。
4 保险与解除保险逻辑分析
本文逻辑控制系统采用机翼位置信号、俯冲速度信号和目标信号完成对三级保险的开关控制,时间窗个数为3个,且三道保险如未按预定逻辑顺序解除即进入绝火状态。对此可将其概括为三独立时间窗非顺序出现则绝火模型,应用马尔科夫理论对巡飞弹电子引信安全性进行分析,结构图和状态转移示意图如图5(a)和(b)。

图5 巡飞弹电子引信结构示意图与状态转移示意图
结构图中K1、K2与K3分别为两静态开关和动态开关,K4、K5、K6为时间窗电路开关。
状态转移图中共存在8个状态,三位二进制数字从低到高位分别表示静态开关K1、K2、动态开关K3,0表示保险状态,1表示保险解除状态,状态定义分别为:
① (000):静态开关K1、K2与动态开关K3均处于保险状态;
② (001):K1保险解除状态,K2、K3保险状态;
③ (011):K1、K2保险接触状态,K3保险状态;
④ (111):保险全部解除,引信电容充电待激发;
⑤ (010):静态开关K1、动态开关K3处于保险状态,但K2保险解除;
⑥ (100):K1、K2处于保险状态,K3解除状态;
⑦ (110):K1保险状态,K2、K3同时解除保险;
⑧ (101):K2保险状态,K1、K3解除状态;
设引信在上电发射后出现解除环境开关激励的概率相同,为(=1,2,3,…),系统状态转移概率为(,=1,2,3,…)。
状态转移分析:

①-②:环境信号1于时间窗t1内出现,信号2、3未出现,概率=(1-)(1-);
①-③、①-④、①-⑤、①-⑥、①-⑦、①-⑧:系统时序出现错误,概率分别为=(1-);=;=(1-)(1-);(1-)(1-);=(1-);=(1-);
②-②:时间窗t2内环境信号2未出现,概率=(1-)(1-);
②-③:时间窗t2内环境信号2出现,环境信号3未出现,概率=;
②-④:时间窗t2内环境信号2、3同时出现,概率=(1-);
②-⑧:时间窗t2内环境信号2未出现,信号3出现,概率=(1-);
③-③:时间窗t3内环境信号3未出现,概率=1-;
③-④:时间窗t3内信号3出现,系统进入待激发状态,概率=;
④-④、⑤-⑤、⑥-⑥、⑦-⑦、⑧-⑧:系统已进入绝火状态,概率=====1。
其一步转移概率矩阵:
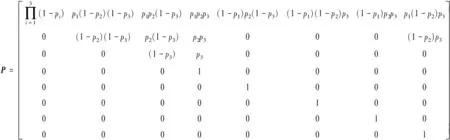
(1)
代入步转移矩阵公式:
()=
(2)
可得到未来时刻系统解除保险概率:

(3)
根据巡飞弹目标状况与所在环境,引入合适的输入参数,进行计算,最终得出系统意外解除保险概率,满足安全性指标。
5 系统仿真验证
为验证本文系统设计可行,现采用FPGA进行编程。系统的RTL视图和运行结果如图6、图7。
结果图中sig1、sig2、sig3表示3种环境信息,_window,=1,2,3表示3个时间窗,K1、K2、K3为静、动态开关。可以看出系统若时序正常则三位保险开关全部解除保险后延迟生成一个起爆信号,如图7(a);如果时序错误(一个时间窗内出现2种环境信号)则立即产生状态异常信号,进入绝火状态,如图7(b)。
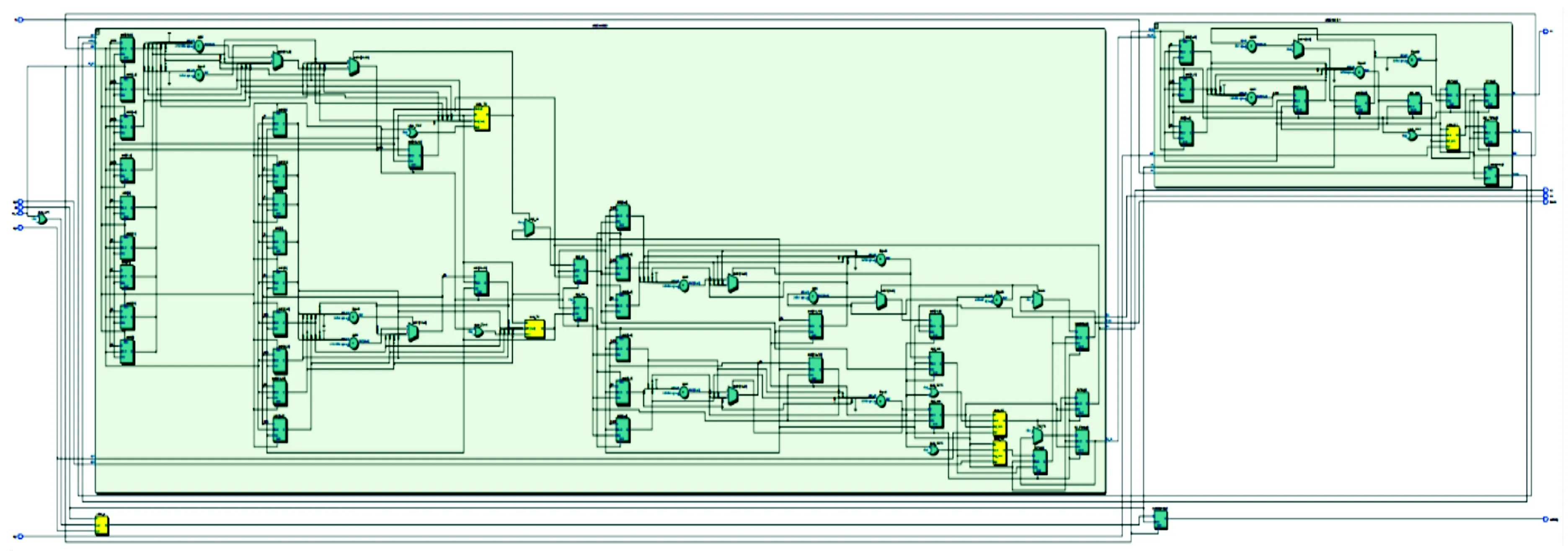
图6 RTL视图

图7 运行结果曲线
6 结论
1) 巡飞弹电子安全系统的3种环境参数(机翼展开信号、俯冲速度信号、目标解保信号),按引信通用设计准则从实际作战环境中选取;
2) 系统三独立时间窗非顺序出现时的系统意外解除保险概率,满足安全性指标;
3) FPGA软件编程逻辑正常,能够为实际作战环境巡飞弹电子引信的工程实践提供参考。
猜你喜欢
文萃报·周五版(2022年46期)2022-11-25 10:24:42
中学生数理化·中考版(2022年6期)2022-06-05 06:49:10
中学生数理化·中考版(2021年6期)2021-11-22 07:52:30
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
新世纪智能(数学备考)(2021年4期)2021-08-06 09:04:50
北京航空航天大学学报(2021年6期)2021-07-20 07:24:00
中学生数理化·八年级物理人教版(2018年9期)2018-11-09 01:21:50
北京航空航天大学学报(2016年8期)2016-11-16 01:51:04
机电信息(2015年9期)2015-02-27 15:55:56
电子设计工程(2015年15期)2015-02-27 12:07:33