
基于改进引力搜索算法的高速并联机器人轨迹优化
2022-06-02 08:10:30徐岩
食品与机械 2022年5期
徐 岩
(绥化学院,黑龙江 绥化 152061)
高速并联机器人被广泛应用于食品、医疗等诸多领域[1-2]。为了提高生产线上高速并联机器人的工作效率,国内外学者对其运动轨迹的规划开展了大量的研究。张好剑等[3]将改进遗传算法用于高速并联机器人的路径规划,发现其能有效降低分拣行程,而且平均分拣效率较优化前提高了14.76%;解则晓等[4]利用电机输入电能和机器人机械能消耗两个能耗指标,对9种轨迹优化方法参数进行了优化,发现Bang-Bang运动定律的分段多项式曲线是最优轨迹,具有时空可重复性;章鸿[5]提出了一种基于三次样条函数的高速并联机器人轨迹规划方法,该法可以改善机器人的工作空间,提高机器人末端执行器的稳定性;郭俊等[6]提出了一种基于蚁群算法的轨迹规划方法,减小了末端执行器的抖动,提高了设备运行的平稳性。上述方法可以生成满足各种复杂约束条件的运动轨迹,但计算效率低、稳定性差。
基于此,研究拟将运动轨迹规划方法用于高速并联机器人末端执行器的轨迹优化,旨在为高速并联机器人轨迹规划方法的研究提供依据。
1 系统概述
图1为高速并联食物拾放机器人的结构,其主要由静平台、动平台、主动臂、从动臂、减速器及电机五部分组成[7]。驱动电机固定在静平台上,从动臂通过球铰与动平台连接;主动臂和从动臂组成支链,动平台由主平台和辅助平台组成。
2 末端执行器轨迹优化
2.1 运动轨迹模型
在末端执行器拾放操作过程中,拾放点的角速度和加速度为零,转角平滑,加速度连续[8]。通过上述分析建立规划模型。以运动时间最低和加加速度变化最小为目标,以速度和加速度在合理范围内为约束条件,建立多约束、多目标、非线性高速并联机器人末端执行器规划模型,如式(1)和式(2)所示。
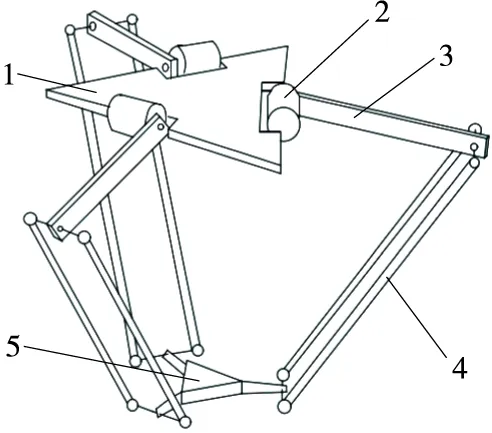
1.静平台 2.减速器及电机 3.主动臂 4.从动臂 5.动平台图1 并联机器人结构Figure 1 Parallel robot body
(1)
(2)
式中:
ti——静平台上3个驱动电机的运动时间,s;
θi——静平台上3个驱动电机的旋转角度,rad;


Vmax——关节最大角速度,rad/s;
amax——关节最大加速度,rad/s2。
选取权重系数k1和k2,根据特定的比例关系结合运动周期目标和加加速度目标,然后用改进算法求解模型[9]。
2.2 改进引力搜索算法
引力搜索算法(GSA)在处理优化问题的过程中,种群中所有个体之间的信息按照万有引力定律进行传递,使个体相互作用,最终聚集在一起获得最优解[10]。GSA具有良好的全局搜索能力。然而,GSA也存在一些问题,如早熟收敛和求解精度差等问题[11]。因此,从初始种群优化、引力常数优化和个体逃逸优化3个方面进行了改进。
2.2.1 初始种群优化 初始种群分布均匀合理,非常有利于算法求解。因此,引入了一种用于初始种群选择的对立学习策略[12]。

Xi=(xi1,xi2,…,xij,…,xiD)。
(3)
其中,xij∈[aj,bj],i=1,2,…,N,j=1,2,…,D。
采用对立学习策略可以通过初始种群Rx获得对立种群Ox,如式(4)所示[14]。
(4)

(5)
从原始种群中获得的对立种群Ox与原始种群Rx相结合,形成新的初始种群{Rx∪Ox}。引入对立学习策略后,种群适应度值的解不仅包括初始种群的解,还包括对立种群的解,提高了算法效率[15]。
2.2.2 引力常数优化 参数α对G值有很大影响,通过控制参数α的值,可以间接影响加速度的变化,以控制收敛速度。将模糊控制引入参数α的控制中,具体步骤:
步骤1:对种群特征进行分析。引入种群丰富度RN和发展度AN,种群丰富度表示种群在解中的位置,其与个体在解中的分布有关,RN越高越不易陷入局部极值,在参数处理中,引入RN来评估搜索范围内个体的理想分布,如式(6)所示[16]。
(6)
式中:
N、D——个体数和维度;
RL——最远两个个体之间的距离;
X——个体位置;
k——迭代次数;
RN——种群丰富度,(0,1)。
根据算法中的个体适应度值设计发展水平AN。负值表示发展方向的偏离,算法解偏离最优解。对于模糊控制,需要评估RN、AN、k和α(t-1),以获得其结果α(t)。
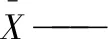
步骤2:设定评估标准。根据需求,将隶属度分为上、中、下三级。表1为参数RN、AN、k、α(t-1)的取值与隶属函数的关系。
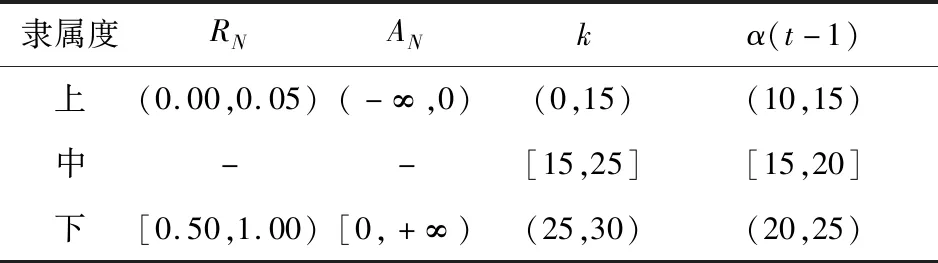
表1 不同等级参数取值范围Table 1 Value range of different grade parameters
步骤3:参数α模糊处理策略。根据步骤1和步骤2中选择的参数,根据表2中的策略选择参数α值。

表2 取值规则表†Table 2 Value rule table
2.2.3 个体逃逸优化 在GSA优化过程中,由于初始种群选择不足会使多个个体逃逸,在限定区分布非常密集,对算法的性能产生非常大的影响[17]。因此,在处理个体逃逸问题时,引入界限异变,逃逸个体xi超过上限如式(7) 所示,超过下限如式(8)所示[18]。
(7)
(8)
式中:
xmax、xmin——逃逸个体的位置上、下限,mm;
u——异变参数(根据xmax与xmin进行选择);
rd——随机变量,[0,1]。
使用上述处理方法,当个体超过限值时,可以避免逃逸个体最终集中在界限上,分散算法的搜索方向,降低搜索速度。
图2为改进引力搜索算法的流程图。

图2 改进引力搜索算法流程Figure 2 Improve gravitational search algorithm process
3 仿真结果与分析
3.1 仿真参数
仿真设备为华为PC,操作系统为windows 10 64位旗舰,11代酷睿i7 CPU,主频2.5 GHz,内存16 GB,仿真平台为MATLAB r2018a[19]。表3为高速并联机器人的基本参数。
表3 机器人基本参数Table 3 Robot basic parameters
高速并联机器人拾放路径为高度25 mm、长度305 mm的类门字型路径。算法约束:最大角速度Vmax=10 rad/s,最大角加速度amax=400 rad/s2。初始种群中的个体数N=40,算法的最大迭代次数为30,单次作业时长0.01~0.20 s。食品拾放对工作效率要求较高,将权重系数设置为k1=0.8,k2=0.2。
3.2 仿真分析
为了验证试验算法的可行性,采用标准引力搜索算法(GSA)和试验算法分别求解了4-3-4规划模型和5-3-5规划模型。分析单次作业时长t(半运动周期)和加加速度的求解结果,对20次的结果进行记录,获得了单次操作的最短操作时间和平均操作时间,结果如表4所示。
从表4可以看出,试验算法得到的4-3-4规划模型最短单次运行时间为0.168 9 s,GSA的最短单次运行时间为0.172 2 s。相同算法下,4-3-4规划模型得到的规划结果均优于5-3-5规划模型的。因此,试验算法得到的运动轨迹设计方案更符合预期要求,可以最大限度地提高机器人的性能,确保稳定性。
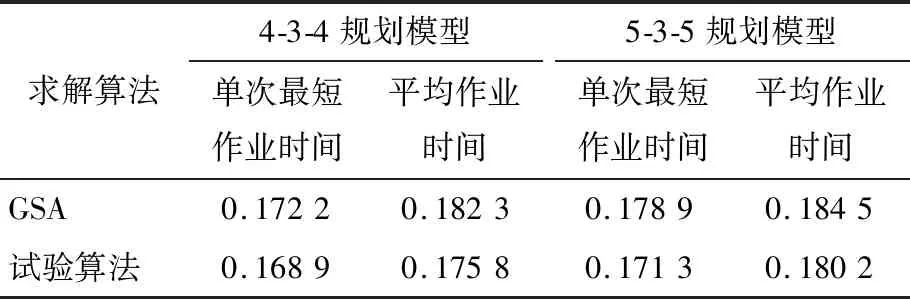
表4 不同算法的规划结果Table 4 Planning results for different algorithms s
为了验证试验算法的优越性,在4-3-4规划模型下,进一步分析了运动周期与抑振效果的关系。加速度变化越小,对机构振动的抑制效果越明显,高速并联机器人运动越稳定。由于轨迹规划模型还包括运动周期的时长,有必要分析两者之间的关系。
设置不同的k1和k2系数,并将其代入模型中,通过改进算法求解模型,单次作业周期曲线和加加速度变化曲线如图3和图4所示。
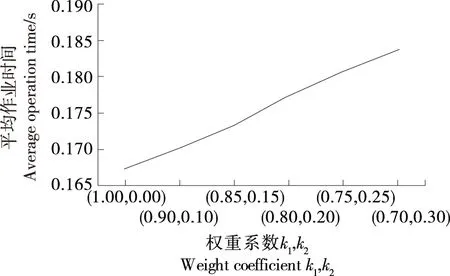
图3 单次作业时长变化曲线Figure 3 Single operation time change curve
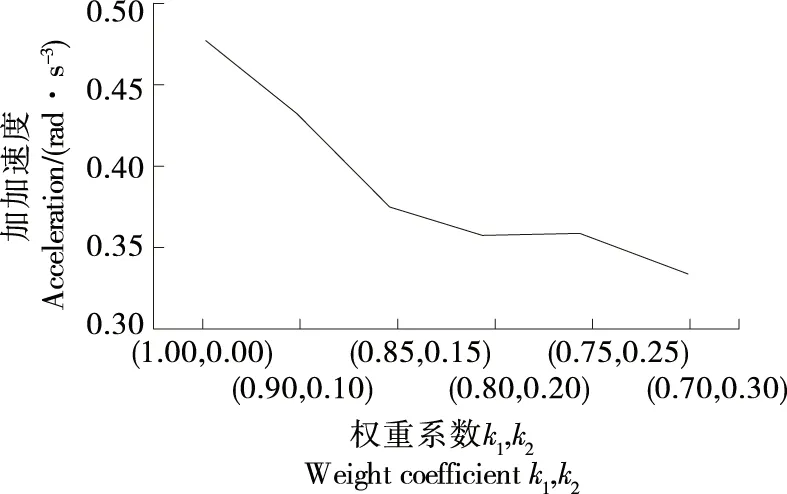
图4 加加速度变化曲线Figure 4 Acceleration curve
从图3和图4可以看出,在不同权重系数下获得的最优解结果存在一定的偏差。在相同的仿真条件下,缩短运动时间和抑制振动的效果为对偶关系。如果运动周期的权重因子较高,则抑制振动的效果较弱。如果加加速度的权重因子较高,则平均作业时间会在一定程度上增加,这会降低高速并联机器人拾放效率。因此,当对高速并联机器人的作业周期要求较高,而对拾放稳定性要求较低时,可以将k1值设置得较大;当高速并联机器人拾放稳定性要求较高且作业周期要求宽松时,可将k2值设置得较大。基于此,可以根据不同的操作要求灵活设定规划目标以满足不同的需求。
4 结论
基于高速并联机器人的体系结构,提出了一种运动轨迹规划方法用于高速并联机器人末端执行器的轨迹优化。建立多约束、多目标、非线性轨迹优化模型,并通过改进的引力搜索算法求解。结果表明,与改进前的规划方法相比,所提方法效率更高,能够在较短的时间内完成拾放任务,单次操作的最短时间为0.169 1 s。鉴于目前的试验设备和数据规模,高速并联机器人相关技术的研究尚处于起步阶段,试验仅研究了高速并联机器人末端执行器的运动轨迹规划方法,未对其动力学和控制系统进行研究。在后期阶段,应不断完善高速并联机器人的相关功能,以适应未来不断变化的应用环境。
猜你喜欢
学苑创造·A版(2025年2期)2025-01-14 00:00:00
今日农业(2022年15期)2022-09-20 06:54:16
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:42
中国环境监察(2016年7期)2016-10-23 05:36:30
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
电测与仪表(2015年15期)2015-04-12 00:43:48
河北科技大学学报(2015年5期)2015-03-11 16:16:37
中央民族大学学报(自然科学版)(2014年1期)2014-06-11 01:28:38
