一种基于倾斜摄影的变电站三维实景建模方法
2022-06-01 07:18:00杨梓瀚
电子测试 2022年9期
杨梓瀚
(广东电网有限责任公司汕头供电局,广东汕头,515000)
0 引言
近年来,数字孪生电网的建设逐步推进[1],构建电网设备三维模型,对数字孪生电网的支撑作用将愈加明显。利用成熟于测绘领域的倾斜摄影航测技术,采用空间三角测量学解算方法,生成电网设备三维模型的方式,可高效产出具有还原度高、可使用性强、功能拓展性广泛等众多优势的设备三维模型。当下,倾斜摄影[2]运用于输配电线路建模,已逐步普及,但对于变电设备的三维实景建模,则尚且鲜有涉足。本文尝试提出一种变电站倾斜摄影建模方法。
1 电网设备倾斜摄影建模应用现状
1.1 输电线路倾斜摄影实景建模应用现状
倾斜摄影用于构建城市、工厂、农田等区域的三维实景,是一项测绘领域的技术,目前已趋于成熟。三维实景模型在输电设备运行、维护、巡检、生产管理等方面,大大提高了信息化、智能化生产水平,带来了输电线路运检的减负增效,甚至推动了生产组织模式优化[2-3]。
1.2 变电设备倾斜摄影的应用前景
与输电线路类似,变电站倾斜摄影建模,是变电站数字孪生的重要实现方式之一,其具有以下两方面的优势。从功能上,变电站倾斜摄影三维实景模型,具有真实的设备外观,清晰可见的设备编号,厘米级误差的位置精度,在生产中应用于设备管理、施工管理、生产过程管控、仿真演练及培训,起到重要支撑作用。从成本上,基本仅需一次性购置采集设备、建模软件、工作站等软硬件,建模过程的自动化水平高,人工干预少,因此生产成本低廉,并且模型生产周期也较短。
1.3 变电设备倾斜摄影建模的技术问题
一般的无人机倾斜摄影技术,主要是利用无人机搭载航测相机,在高空从多角度采集设备,而由于航拍高度较高,此种方法生成的三维模型,不利于对变电设备复杂结构、局部细节的复现,并且,这些需要复现的细节,在后续模型功能的使用中十分重要。因此,如直接将一般的倾斜摄影航测方法应用于变电站三维实景建模,通常或不能满足变电站无人机作业的安全要求,或不能达到理想的建模效果,因此该方式尚且鲜有涉足。
1.4 变电站倾斜摄影建模的主要思路
根据上文所述,变电站倾斜摄影建模方法,务必需要满足变电站无人机安全飞行的要求,又需提高模型精细度。因此,可以认为,变电站无人机倾斜摄影,主要就是解决如何使无人机飞得更低、更贴近设备的同时,又保证飞行安全的问题。
为此,本文提出如下构想(图1):先使用一般的倾斜摄影建模方法,在高空对变电站全站进行航测建模,得到一个初步的模型(后文简称“粗模”),在粗模上规划无人机自动航线,利用验证过的、安全可靠的自动航线,在更低的高度、更贴近设备的距离,采集设备近照,最后将高空、低空航测的照片共同用于建模解算,得到变电站的精细模型(后文简称“精模”)。下面,本文将对此方案展开详述。

图1 变电站无人机倾斜摄影建模主要流程
2 安全技术介绍
2.1 安全优先原则
变电站的无人机航测,应同时兼顾飞行安全以及航测精度,但在安全与精度存在矛盾时,应按照优先考虑安全因素的原则。例如:建模精度不足时,优先考虑使用更长焦距的镜头,而不是通过降低飞行高度提升精度。
2.2 自动驾驶优先原则
由于变电站的特殊性,手动驾驶无人机航测作业,对飞手的操作要求较高,劳动强度也更大,带来一定安全风险。因此,航测无论是高空或低空,均优先采用自动航线,通过航线控制无人机避开有电设备、构(建)筑物等障碍物。手动驾驶仅用于紧急情况下飞机操作收回。
2.3 自动航线验证方法
由于高精度的航测,需要使用的无人机尺寸往往会超过中型无人机的标准,其无论是尺寸或是重量,均给变电站安全飞行带来挑战。因此,若采用中型以上无人机以自动航线航测的方式,则需要先通过以下方法进行验证:选取轻型无人机(即起飞重量在4kg以内的)作为安全检查专用无人机,使其按建模航测的航线飞行,飞行过程宜开启各类避障功能,用以检测航线的安全性。在经过安全飞行验证,并确认本条自动航线安全裕度足够时,再启用中型无人机进行自动采集。
2.4 无人机失控处置方法
为保证无人机的失控风险随时可控,飞行航线须按照紧急返航通道,严格划分为两类(图2):第一类为“上跨型”,无人机上方不能存在任何设备或导线,该类航线的预设失控行为为升高返航;另一类为“下穿型”,无人机下方不能存在任何设备或导线,该类航线的预设失控行为为原地降落。自动航线起飞前,应设置并检查不同类型的失控返航行为,包括返航高度、返航点等参数。
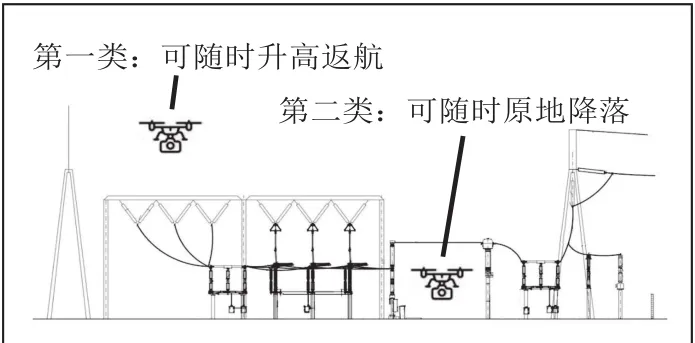
图2 两类航线各自的紧急返航通道
2.5 安全距离
(1)高空航测的飞行高度,应躲过实际飞行区域所覆盖的避雷针、临近输电杆塔等较高构(建)筑物的最高点,应至少高于5米以上。
(2)无人机与非带电体(构架、避雷针、建筑物等)的安全距离:应距离站内设备3米以上(图3),包括:与高于飞行高度的设备水平距离不小于3米,与无人机下方的设备垂直距离不小于3米。

图3 无人机高、低空测时与非带电体的最低安全距离
(3)无人机与带电体的安全距离:按电压等级,500kV大于3.9米,220kV大于2.1米,110kV大于1.2米,35kV大于0.7米。
(4)无人机飞行中,人与无人机的安全距离不小于3米。
(5)注意变电站围墙外的输电杆塔、输电线路、高大建筑物等带电或非带电体,并按以上标准保持安全距离。
3 变电站倾斜摄影建模操作流程
3.1 高空航测
(1)现场勘察
航测作业前,应做好变电站内设备的实地、高空勘查工作。实地勘察应确认高空航测的飞行高度、航测范围、飞行范围。
飞行高度一般选择高于站内需建模设备(通常为避雷针)的最高点约5到10米左右,航测范围一般为变电站围墙及围墙外一定面积的区域。由飞行高度和航测范围,即可确定飞行范围(图4)。应注意的是,当倾斜摄影的角度过低时,飞行范围的边距会显著超出航测范围,此时要重新勘查,以策安全。
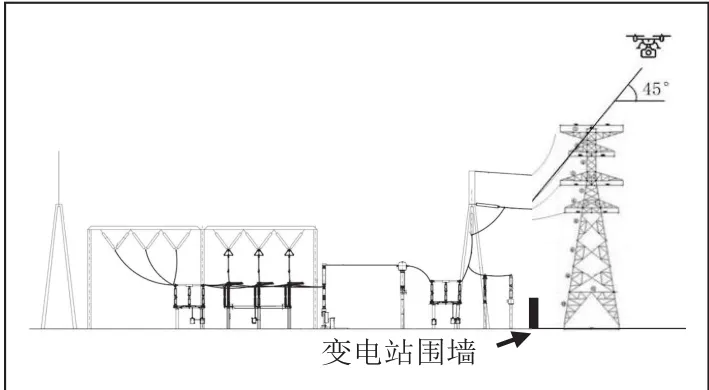
图4 倾斜摄影角度较小时飞行边距会显著超出航测区域
(2)高空勘察
在得到航测适合的高度后,需将无人机镜头水平朝前,操作起飞至该高度后,环绕航测范围区域巡视一周,确认该高度内确实无高于此高度的构(建)筑物,方可开展航测作业。该步骤建议使用安全检查的轻型无人机。
(3)高空航测作业
与一般的倾斜摄影航测一样,变电站上空开展航测作业。
作业时,航拍倾斜角可选-55°至-75°范围,为兼顾效率,旁向重叠率70%,航向重叠率80%,主航线的飞行方向与站内设备的排布方向斜错开,以使得所有设备拥有较大暴露面。飞行高度应符合高空勘察结果,飞行速度越低则效率越低,但安全性越高,拍摄密度越高,效果越好,建议不超过3米每秒。
3.2 获取粗模
将高空航测得到的采集结果,使用空间三维计算软件进行解算、建模,得到初步的结果(即“粗模”),该解算结果用于下一步规划低空补测的航线。粗模无需十分精密,仅需选取“五向”飞行中的俯视正摄图进行解算即可。考虑到规划航线的方便性,解算结果宜为点云。
3.3 低空补测
在粗模上围绕需要精细修模的设备,规划低空补测的自动航线,使航测照片整体上呈“三层式”分布(图5),即以高空航测为第一层,主要用于覆盖全站所有设备;以导线、构架上方补测为第二层,覆盖主要设备;以近地飞行的航线为第三层,主要针对部分重要设备的细节精修。
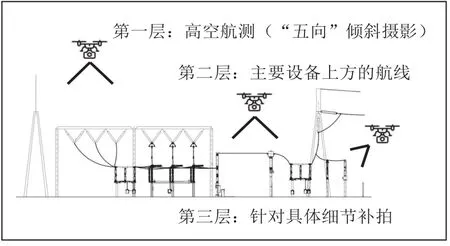
图5 变电站倾斜摄影建模的“三层式”航拍法
考虑到变电站设备的排布规律大致与导线延伸方向相同,低空补测的“第二层”航线,可以沿着如下两个方向,分别各飞一个往返:一个方向沿设备区的主母线,另一个方向沿各电气连接间隔内的导线方向,一般而言,两个方向成垂直相交,效果较好。
第三层非绝对必要,在有以下需要时,可适当增加该层:一是主变等设备具有的重要附属件,由于位置靠近地面,通过高空航测以及第二层补拍难以近距离覆盖的;二是部分设备的双重编号牌需要在模型中清晰呈现的,以及其他因各种需求,须更清晰复现的。
如添加第三层的补测拍摄,需注意尽量与第二层、第一层的垂直重叠率,例如,某张第二层拍摄的照片,应与某张第三层拍摄的照片具有50%的画面相似部分。最终的采集结果,应使所有的照片都与其他至少1张照片拥有50%以上的画面重叠率。
3.4 解算精模
将高空航测和低空补测所拍摄的照片,放在同一次解算中运算,即可得到较高精度的倾斜摄影实景模型。建模时,建议对变电站外围环境同样纳入模型生成范围,以供后期使用。
4 结束语
在变电站使用倾斜摄影技术进行精细化建模,拥有广阔的应用前景,但该技术应用也尚处于摸索期。本文从建模的主要思路、保障安全的技术措施以及具体建模的操作方法,构想了一种变电站倾斜摄影建模的一种新模式,其中还有许多欠考虑之处,但本文旨在抛砖引玉,为后续进一步研究提供借鉴参考。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
环球时报(2022-02-28)2022-02-28 16:16:01
华人时刊(2021年23期)2021-03-08 09:27:24
小哥白尼(神奇星球)(2021年12期)2021-03-08 09:22:56
小天使·一年级语数英综合(2019年2期)2019-01-10 11:57:30
小天使·一年级语数英综合(2018年11期)2018-11-23 09:47:26
小学阅读指南·低年级版(2018年5期)2018-11-02 10:19:50
北方音乐(2017年4期)2017-05-04 03:40:09
太空探索(2016年5期)2016-07-12 15:17:58
太空探索(2016年6期)2016-07-10 12:09:06