
一种用于提高北斗短报文通信成功率的基于数据特征提取的数据融合算法
2022-06-01 13:17王雁来王传霸
计算机测量与控制 2022年5期
王雁来,王 钰,王传霸
(1.北京华力创通科技股份有限公司,北京 100094; 2.北京华力智飞科技有限公司,北京 100094)
0 引言
北斗卫星导航系统(BDS)是我国自主研发的能够提供卫星无线电测定业务(RDSS)的系统。RDSS定位系统通过扩频调制,提供北斗短报文通讯。北斗短报文的载荷区保存用户的业务数据,从而实现在各行各业包括应急管理等特殊领域的导航和通信服务应用。RDSS业务通过直接序列扩频调制方式实现了链路的正常工作,从而完成终端的精确定位。但是,由于RDSS系统采用短突发方式发射入站信号,短报文通讯是瞬时发生的,因此短报文的通信成功率直接影响了RDSS系统的通信业务。提高北斗短报文的通信成功率直接决定了实际应用系统的运营效果。
针对民航飞行器实现基于北斗卫星导航系统的追踪,通过在飞行器上安装北斗机载终端,配合地面接收机进行基于RNSS的全球定位以及基于RDSS的北斗短报文数据通信,从而实现对飞行器的实时追踪和飞行健康监控以及数据管理。基于北斗的飞行器全球定位追踪系统可以彻底摆脱ACARS飞行器监控体系,并能够借助北斗信号在ACARS盲区中的覆盖,从而实现全方位的飞行器跟踪和监视。
1 系统结构及原理
2017年在中国商飞公司在国产大飞机ARJ21-700上安装了北斗导航机载设备,完成了相应的试飞测试科目。这是北斗卫星导航系统第一次在运输航空领域的测试应用,同时也是国产民机第一次使用国产导航系统。
为了加快推广国内运输类飞机的北斗追踪设备应用,中国民航局在2019年发布了《中国民航北斗卫星导航系统应用实施路线图》,明确了北斗系统在中国民航应用的系统性实施路径。随着中国民航在北斗系统的应用,北斗办和中国民航总局都陆续出台了相关规定和适航标准。
北斗机载终端通过北斗RNSS全球导航系统获取飞机当前的定位信息(经度、纬度、高度、速度),通过机载总线获取飞机的航电基本数据,将内容组合为北斗短报文通过RDSS系统发送到北斗地面指挥机。北斗地面指挥机收到飞机上的北斗机载终端下发的北斗短报文后,进行数据解析、数据归一化以及数据分析,完成飞行器的飞行追踪、飞行器的健康管理以及数据管理。
系统实现原理架构如图1所示。
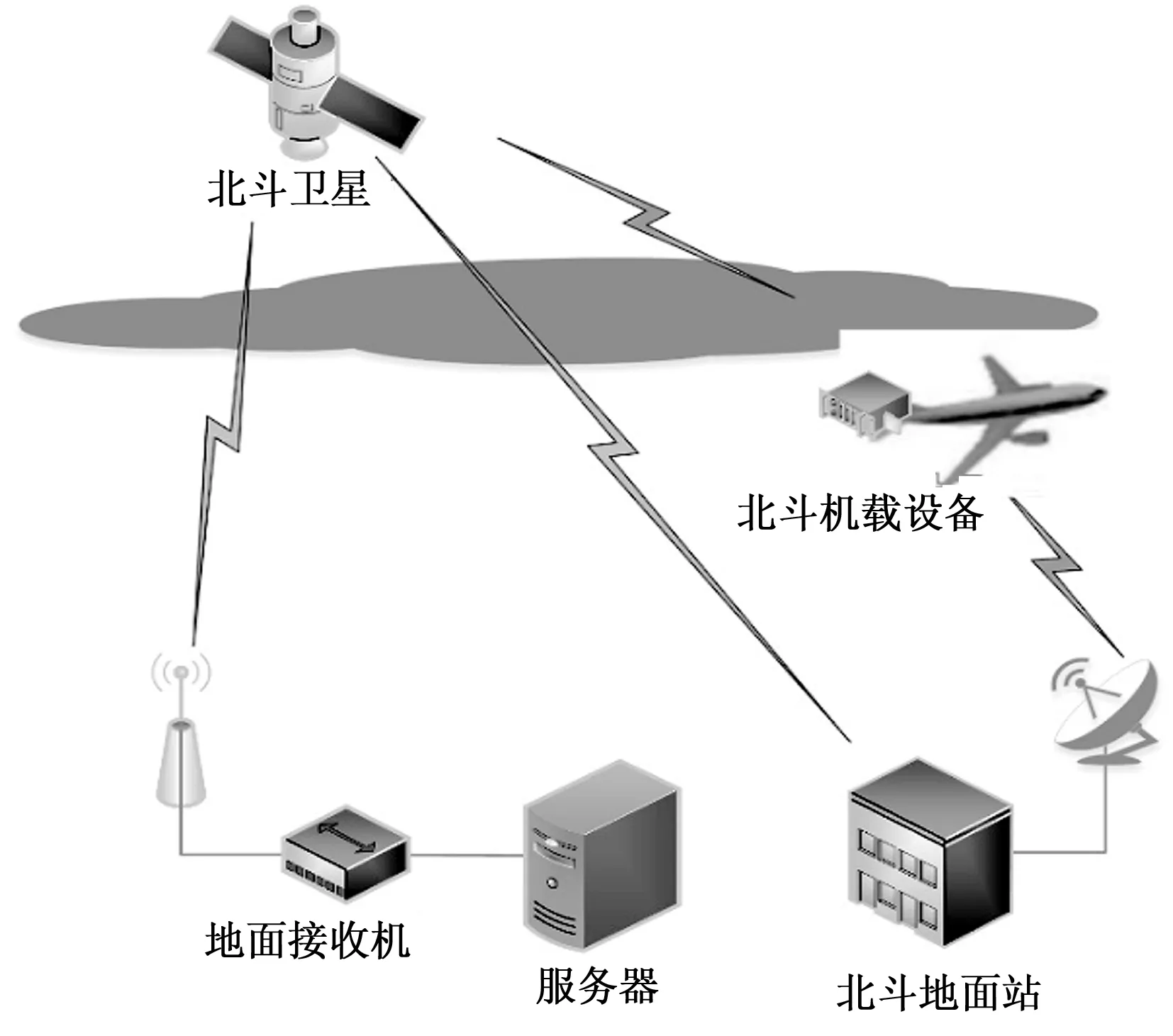
图1 北斗RDSS通信架构原理图
根据图1所示,北斗卫星通过北斗地面站完成北斗短报文的分发,从而实现了北斗机载终端和北斗地面指挥机之间的通信链路,完成北斗短报文的传输通信。由于空空链路上的各种不确定情况,加上飞行器的高速飞行过程会加剧降低北斗短报文数据通信的成功率,因此针对飞行器的RDSS北斗数据追踪需要有很多单独的优化或者处理,从而提高北斗地面指挥机的数据通信成功率。具体有信号增强以及数据融合等两个方面。
1.1 抗干扰技术
由于环境复杂,飞机在飞行过程中的空中无线环境很容易受到各种干扰,包括多径误差、大气层干扰以及地面信号干扰等,甚至在地面由于建筑物等遮挡导致信号衰减以及各种信号干扰等,从而导致北斗卫星通信链路连续发送多条短报文后,报文全部被接收的几率比较小,并且接收端不发送回执信息,无法确定报文是否被成功接收。如果地面接收的信号质量一旦被环境干扰,必然会进一步降低短报文的通信成功率。
根据历届国际无线电联盟频率分配会议对RDSS的频段分配,将L频段1610-1626.5 Mhz分配给地对空上行方向,S频段2483.5-2 500 Mhz分配给空对地下行方向。但是目前常规无线Wifi的频率频段由IEEE 802.11 b/g/n定义,其工作频率为2.4 GHz。由于该频率和北斗短报文的下行频率非常接近,所以Wifi信号的强烈带外杂波也会干扰到北斗短报文下行的信号质量,从而导致北斗短报文的通信成功率降低。
提高北斗短报文的通信成功率的解决方法主要有天线增强技术和接收信号的抗干扰技术等两大类。其中,天线增强技术根据当前天线所在空间环境的信号质量,选用相匹配的天线类型并改变天线的安装方式,从而避免信号干扰。在该理论的基础上,通过增加多个天线实现联合抑制信号干扰也是一种比较有效的技术创新,该方法由M.MAQSOOD等人于2010年提出。随着技术的逐渐演进与发展,JEFF FROLIK于2015年提出了三极化天线分集技术,该防范能够有效减轻多径信道对信号的干扰。此外,提高北斗短报文的通信成功率的第二大类技术是接收信号的抗干扰技术。这类技术主要通过对信号的各种不同方式的滤波来提高信号质量,从而提高数据通信成功率。最为经典和传统的算法当属基于卡尔曼滤波的动态滤波抗干扰算法。随着对滤波研究的深入,自适应滤波技术也有了很大的发展,其中包括基于自适应统计贝叶斯MMSE信道估计的算法研究等。这类技术也极大的改善了北斗短报文的通信成功率。
尽管目前基于天线技术和抗干扰算法的技术研究都有了系统的发展,但是在实际应用场景下,为了提高北斗短报文的通信成功率,除了需要采取抗干扰天线提高地面接收系统的杂波干扰能力,并尽量寻找空中信道质量较好的地面环境之外,还可以利用多信道数据融合的方法进一步提高通信成功率。
1.2 数据融合技术
数据融合技术是对来自多源信息进行综合处理,通过对不同来源的数据进行归一化、筛选过滤以及合并处理后,得到更为准确、可靠的结论。信息融合技术主要通过对多个数据来源渠道的数据进行处理,通过对大量不同渠道获得的同类型数据在不同维度进行有序组合,从而实现多源多维度的数据关联和内容互补,进而获得更加丰富和细致的信息,为用户提供更为有效的决策参考。
对于北斗短报文数据的融合,主要通过对不同渠道获取的北斗短报文数据,按照时间域进行数据排序,并在此基础上进行数据特征提取。根据提取到的数据特征进行多源数据合并。
一般来说,数据融合主要包括:数据级融合、特征级融合和决策级融合等3个层次。这三类数据融合是按照对数据的加工处理层次的不同而区分。第一类是数据级融合。这类融合不对原始数据进行加工和处理,直接进行关联和融合。该融合可以最大程度保留原始数据的特征,并提供足够的数据细节信息。第二类是特征级融合。这类融合需要先对原始数据进行预处理,包括数据清洗以及数据特征提取,然后对所提取到的数据特征进行融合。该融合能够快速寻找数据特征之间的关系,快速去除冗余无效数据信息,避免数据干扰。第三类是决策级融合,该融合需要在多源原始数据的基础上,直接进行决策和分析,并将多源数据的多种决策结果进行融合,从而获得总体决策结果。
目前和数据融合相关的技术和算法有很多,包括最近邻法则、最大似然法、最优差别、统计关联和联合统计关联等。这些算法都对原始多源数据进行了多次处理,并在数据处理过程中建立了相应的系统模型。根据对原始数据处理方式的不同,这些系统模型主要分为功能型系统模型和数据型系统模型等两大类。其中功能型系统模型根据数据处理顺序进行构建,主要有UK情报环、Boyd控制回路(OODA环)等。数据型系统模型则根据数据内容和数据处理的不同阶段分别进行构建,最为著名模型是美国国防部数据融合联合指挥实验室所提出的JDL模型。随着数据融合技术的发展,对数据处理的逐渐深入以及在不同阶段对数据的不同需求,逐渐出现了瀑布模型和Dasarathy模型。其中,Dasarathy模型包括了5个融合级别,其中第二级别的融合为特征选择和特征提取,即数据和特征组合的融合。
特征选择是从原始数据中选择出可以代表数据的特征子集,把原始数据从高维空间转换到低维空间中,并将原始特征合并成一些新的特征类型来进行表示。与特征提取相比,特征选择保留了原始数据的物理意义,在后续的数据分析中往往会更加方便。特征选择的方法是从原始特征数据集中选择出子集,是一种包含的关系,没有更改原始的特征空间。
2 北斗短报文兼收系统架构
基于RDSS的北斗短报文通信除了常规的接收方式之外,还有兼收方式。由于每个北斗终端机都有唯一的ID号,并采用单独的加密方式,短报文通讯经过地面中心站转发实现。通讯的具体流程是:(1)短报文发送方将包含接收方ID号和通讯内容的通讯申请报文加密后通过卫星转发入站;(2)地面中心站接收到通讯报文后,经脱密和再加密后加入持续广播的出站广播电文中,经卫星广播给用户;(3)接收方接收出站信号,解调解密出站电文,完成一次通讯。
指挥型北斗RDSS 单元能够兼收下属用户的定位和短报文信息,实现用户信息管理、通播、查询、调阅和指挥调度等功能的RDSS 终端设备。不同的北斗终端之间建立上下级的从属关系,上级用户可向下属用户发布通播信息,并兼收下属用户的定位通信信息。
由于北斗地面指挥机可以设置多个北斗终端作为管理下属,因此可以通过兼收方式实现所有归属的北斗终端的短报文通信内容。系统通信架构如图2所示。
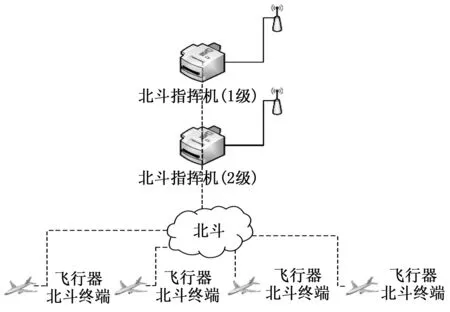
图2 北斗RDSS指挥机通信架构图
从图2可以看到,系统设置两级指挥机,分别为1级管理和2级管理。其中2级指挥机直接接收所有被管理的北斗机载终端。北斗机载终端的北斗短报文直接下发到2级指挥机。1级指挥机负责管理2级指挥机,并兼收2级指挥机和下属北斗终端的短报文通信数据。在该通信架构下,1级指挥机可以通过兼收功能获取2级指挥机和下属所有北斗终端之间的短报文通信数据。
图3展示了北斗短报文兼收过程,通信链路上的序号表示数据发送顺序,其中第4和第5为同时发生。
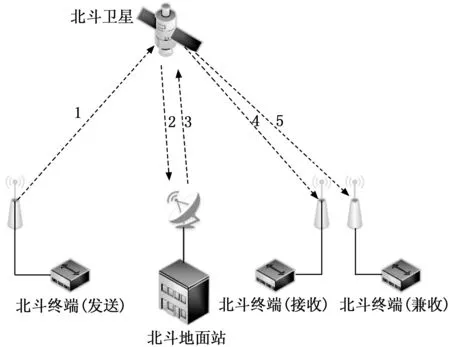
图3 北斗RDSS兼收通信原理图
3 基于数据特征提取的数据融合算法
基于Dasarathy模型,可以通过数据特征提取进行不同来源数据的融合。在北斗短报文数据中,数据特征包括:源ID,目标ID,发送时间,飞机位置(经纬度)和飞行速度等。由于北斗短报文的通信特点,每个终端每分钟发送一次当前北斗终端的经纬度,并有数据发送绝对时间,所以可以根据北斗指挥机所收到的北斗短报文解析后的报文发送时间进行排序以及融合。
由于有数据接收和数据兼收两类数据通道,因此数据融合算法通过使用上述的三类数据特征值进行数据对比,将缺失的数据进行并集操作,从而提高数据接收成功率。当数据接收的通道有短报文丢失或者数据有缺失的情况下,使用兼收的短报文数据进行补足。
以上介绍的数据融合方法涉及到3个核心算法,包括不同源的数据特征提取、数据对齐以及数据融合处理。
数据对齐:首先数据特征中的源卡号SourceID以及发送时间Time进行数据对齐,确保多源数据的一致性,从而避免数据融合或者冲突处理的准确性。数据对齐的计算公式为:

(1)
根据公式(1),只有当数据源ID和发送时间都相同的才进行数据对齐,否则不需要对齐。
数据融合处理:对于多源数据如果没有进行数据对齐,则说明多源数据互为补充,只需要针对源ID相同的数据按照发送时间排序合并即可。对于完成了数据对齐的数据,说明源卡号和发送时间完全一样,需要做两类融合处理:
对于数据特征值完全一样的情况下,只选择其中一个来源的数据,多源其余相同数据抛弃;对于数据特征值不完全一致的情况下,对比上一个发送时间的同源数据,选择差值最小的数据。
根据上述的数据处理,数据融合的公式如下:


(2)
公式(2)中i
代表数据发送时间,通过数据融合获得按照发送时间的北斗短报文数据序列。公式中j
代表数据来源,针对不同来源的数据,选择和上一包数据的特征值差值最小的数据作为融合后的数据。本系统的应用场景中由于所有飞机北斗机载终端的短报文都将发送到2级北斗地面指挥机中,因此数据融合的算法将针对1级北斗地面指挥机和2级北斗地面指挥机采集的数据通过数据特征提取后进行融合。
具体算法流程如图4所示。
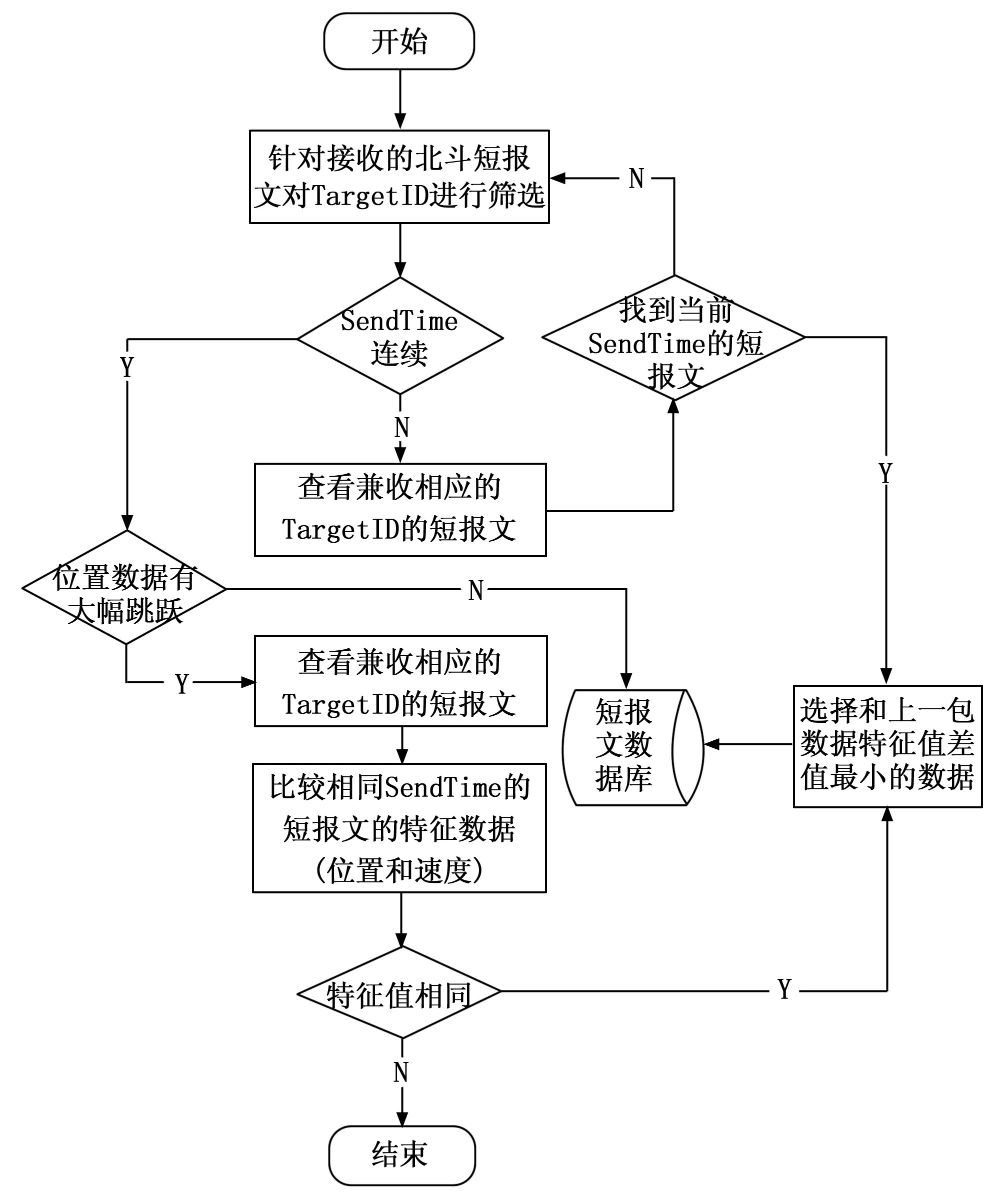
图4 数据融合算法流程图
4 实验结果与分析
4.1 实验步骤和方法
为了检验数据融合的效果,系统搭建真实使用场景,通过北斗地面指挥机接收飞机北斗机载终端发出的北斗短报文。本系统已经对某航空公司的20架飞机进行位置追踪和数据管理,日常运营过程中,所有的飞机均按照公司正常业务进行航班安排。
为了避免某些飞机固定航线的特定空间信号质量干扰本算法,随机选择3架飞机的机载北斗终端进行数据测试。
首先,针对两级北斗指挥机的数据接收架构,单独列出了数据兼收和数据接收两个不同数据通道的数据接收情况,并按照飞机日常运营12小时的数据进行比较。
然后随机挑选3个终端进行数据融合,并比较数据融合前后的短报文通信成功率,从而判定所提出的数据融合算法的效果。
4.2 实验数据
按照上述的实验步骤,选择3个机载北斗终端进行数据接收成功率统计。从0点开始监控到下午5点,分别统计接收缺失数据以及兼收缺失数据。由于时间跨度超过12小时,三架飞机的实际运营空中航线完全不同,因此可以排除由于具体空间信号特定干扰所引起的通信成功率。
对于3个终端的数据,按照时间顺序显示数据缺失情况,菱形为数据接收所缺失的数据,方形为数据兼收所缺失的数据,三角形为两种数据源共同缺失的数据。
图5是终端1的数据接收情况,图6是终端2的数据接收情况,图7是终端3的数据接收情况。
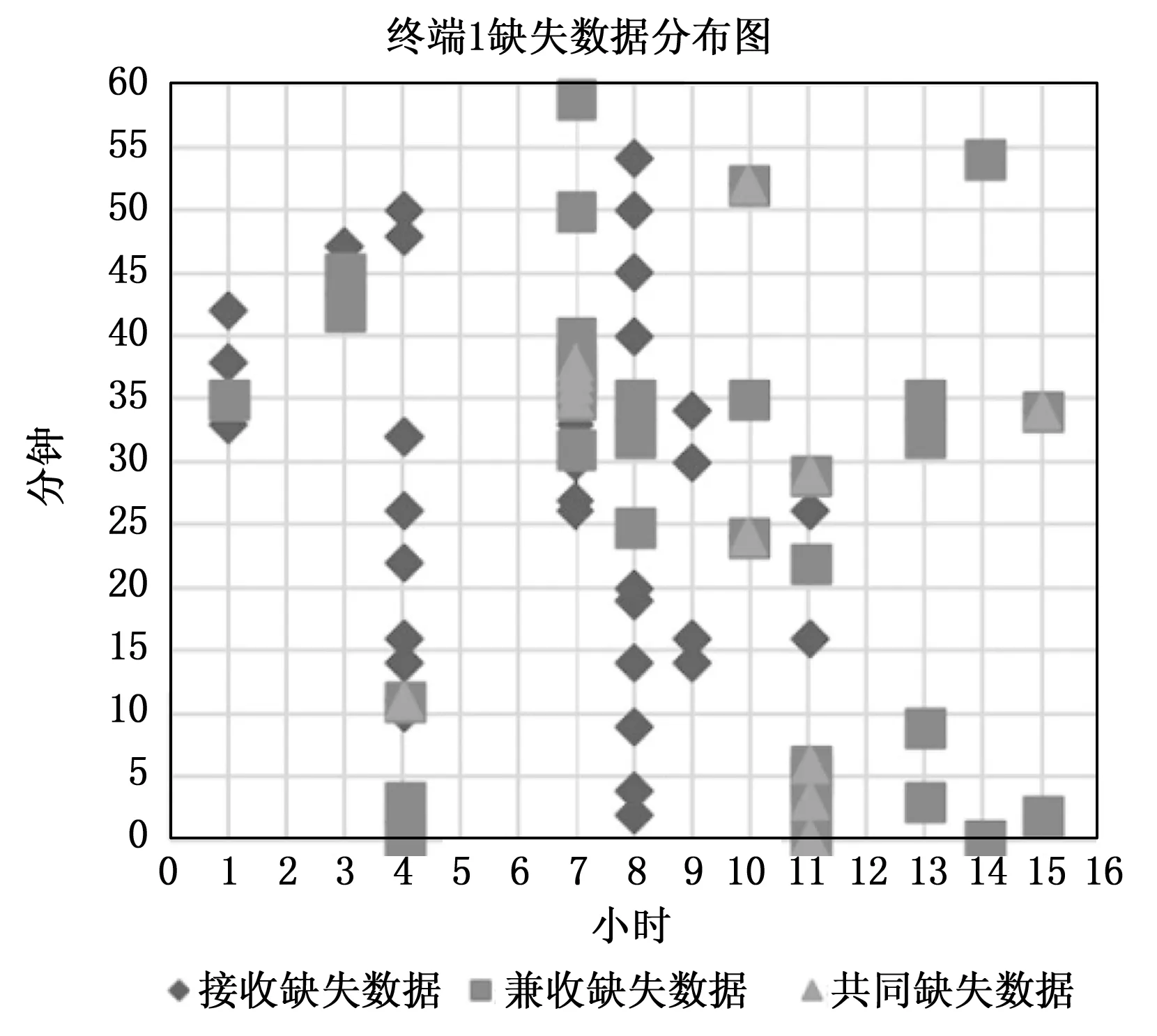
图5 北斗短报文数据缺失分布图(终端1)
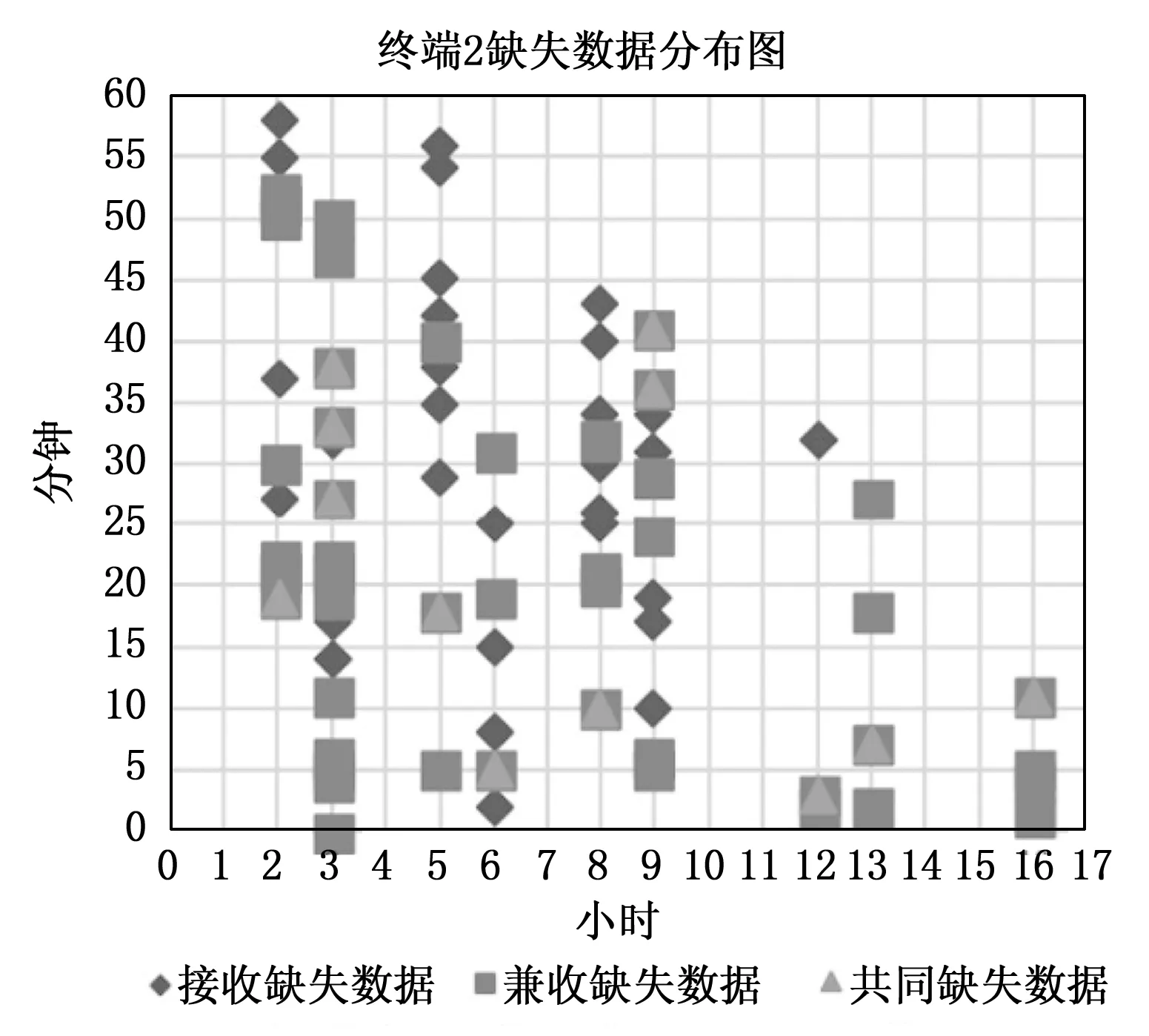
图6 北斗短报文数据缺失分布图(终端2)
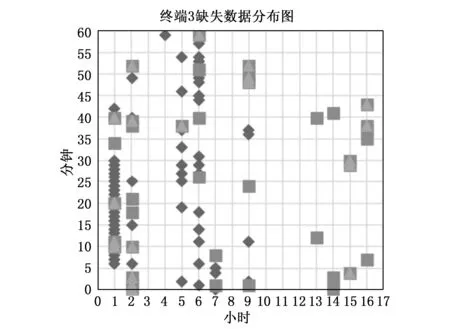
图7 北斗短报文数据缺失分布图(终端3)
由于随机选取的三架飞机全天的飞行轨迹是不同的,因此3个北斗机载终端在17个小时的跨度下可以有效覆盖不同空域情况下的数据发送情况。
从上述3个终端的不同来源的数据分布可以看到,接收方式和兼收方式缺失的短报文分布不同,如果采用数据特征提取的方式进行数据融合的话,可以有效提高数据通信成功率。
4.3 实验数据分析
采用数据接收和兼收的数据融合后,通信成功率会大幅提高,如图8所示。
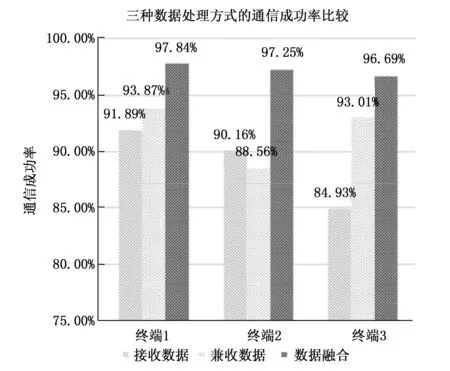
图8 数据融合效果比较图
从测试结果来看,上图显示经过数据融合后,长时间的北斗短报文通信成功率能够超过96%。这一测试结果不仅符合北斗通信协议标准要求的96%通信成功率,同时也满足实际运营飞机的管理用户对当前运营飞机的位置追踪和数据管理的使用要求。
5 结束语
由于北斗通信空间信号干扰,导致的北斗短报文长时间运行通信成功率下降的问题,提出了一种基于数据特征提取的数据融合算法,通过北斗地面指挥机的数据接收和数据兼收两种短报文接收方式,进行基于源ID、目标ID、发送时间以及终端位置和速度等的数据特征比较和融合,从而有效提高了北斗短报文的通信成功率,能够符合飞机追踪的使用要求。
本算法需要搭建两级北斗指挥机,在系统架构上略显复杂,未来可以基于抗干扰天线以及相关滤波算法进行深度数据融合,从而摆脱双级北斗地面指挥机的系统架构,简化系统使用。
猜你喜欢
汽车电器(2022年9期)2022-11-07
导航定位学报(2022年5期)2022-10-13
天天爱科学(2022年9期)2022-09-15
电子技术与软件工程(2022年11期)2022-09-09
集装箱化(2022年2期)2022-06-08
中国药学药品知识仓库(2022年10期)2022-05-29
中国典型病例大全(2022年9期)2022-04-19
科学家(2021年24期)2021-04-25
文萃报·周五版(2019年41期)2019-09-10
电机与控制学报(2018年9期)2018-05-14
