基于事件触发的Buck型DC-DC变换器有限时间控制
2022-06-01 13:35:52黄世沛曾国强张正江
计算机测量与控制 2022年5期
吴 悔,黄世沛,曾国强,张正江
(温州大学 电气数字化设计技术国家地方联合工程实验室,浙江 温州 325035)
0 引言
DC-DC降压变换器广泛应用于现代工业,如海岛微电网,电动汽车和太阳能电池能源管理等。随着分布式发电和智能微电网发电技术的发展,对于DC-DC降压变换器的可靠性的要求越来越高。传统的变换器的控制方法集中于线性控制方案,如传统的PID控制是基于目标误差而不是模型的控制,虽然可以实现对系统输出电压的控制,但是动态响应较慢、控制效果较差。
近年来,很多现代控制方法被提出来,如状态空间法、Lyapunov直接法等,用于改善DC-DC变换器的控制性能。文献[8]基于状态空间法,设计了基于极点配置的反馈控制器,使得系统的稳态特性和动态特性得到了进一步的改善。文献[9]提出了一种基于Lyapunov直接法的非线性控制方法保证了系统大范围渐近稳定。文献[10]针对具有输入扰动的DC-DC升压变换器,结合状态空间理论提出了一种状态观测器的设计方法,有效地降低了系统输出电压的超调量。文献[11]利用了切换线性系统的理论,对DC-DC变换器进行建模与控制,最终也是能够保证系统的渐近稳定性。近年来,由于有限时间控制的系统不仅具有收敛速度快的优点,还具有较好的抗干扰性能,被广泛研究,用于各类系统的设计。文献[13]研究了一类线性系统的有限时间有界跟踪控制问题,所提出的控制方法使得闭环系统的误差信号可以处于给定的界内。文献[14]设计了一种有限时间控制器,解决了具有参数不确定的刚体航天器的姿态跟踪控制的问题。文献[15]基于有限时间稳定性理论,针对发生混沌现象的四阶电力系统,设计了一种有限时间控制器,能较好地抵抗外界干扰。文献[16]针对输入电压未知的Buck型DC-DC变换器提出了一种快速的电压收敛控制算法,保证了输出电压在有限时间内收敛于参考电压。文献[17]结合齐次滑模控制理论设计了有限时间的无电流传感控制器,解决了Buck变换器输出电压的有限时间控制问题。文献[18]提出了一类依赖驻留时间的切换规则,实现了DC-DC切换仿射系统的有限时间稳定。
需要指出的是,上述所讨论到的研究结果均是基于连续时间控制的,即控制器时刻都在更新。当系统状态趋于稳定时,数据的传输、控制器的实时更新可能就会造成通信资源的浪费。随着数字控制技术的发展,周期采样控制被提出用于闭环控制系统的分析和设计。然而,为了较好地获得期望的性能,一般周期采样控制的更新周期很小,此方法仍旧会导致频繁的数据传输。基于上述讨论,如何高效的利用通信资源变得十分重要。有研究指出事件触发控制既能保持系统的稳定性,还能够弥补传统连续时间控制下造成的有限通信资源浪费的不足。文献[20]提出了3种新的事件触发设计策略,分别是基于固定阈值策略,相对阈值策略和切换阈值策略,保证了系统跟踪误差指数收敛到一个可调的紧集。文献[21]提出了一种基于切换阈值策略的事件触发控制器,保证闭环系统的所有信号有界。
综上所述,目前关于DC-DC变换器的渐近稳定控制或有限时间控制的结果都是基于连续时间控制的,还未见有DC-DC变换器事件触发控制的结果。因此,本文主要研究基于事件触发机制的Buck型DC-DC变换器有限时间控制。首先,将Buck变换器建模成一类反馈型非线性系统。然后,构造一种状态变换,基于此变换设计一种事件触发机制。接着,采用反步法设计一种状态反馈控制器,该控制器仅在事件触发条件满足时才更新。通过构造一类Lyapunov函数,证明闭环系统的有限时间稳定性,即变换器的输出电压能在有限时间内收敛到给定电压,同时通过对事件触发误差求偏导数证明所提出的有限时间事件触发控制方案不会产生Zeno现象。最后,通过仿真结果与分析,表明所提出的有限时间事件触发控制方案的有效性。
1 问题描述
针对Buck型DC-DC变换器,其工作原理如图1所示,根据开关管的导通和关断两种状态,在开关频率足够快的情况下,建立如下的Buck型变换器的状态空间模型:
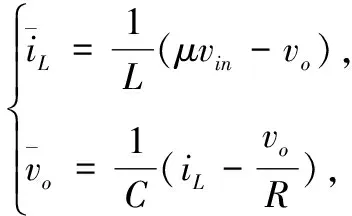
(1)
其中:v
是输入电压;v
是输出电压;S
是MOS型开关;D
是二极管;R
为负载电阻,L
、C
分别是电感和电容;i
为电感电流;μ
(t
)∈[0,1]是控制输入,该信号最终用于驱动PWM波。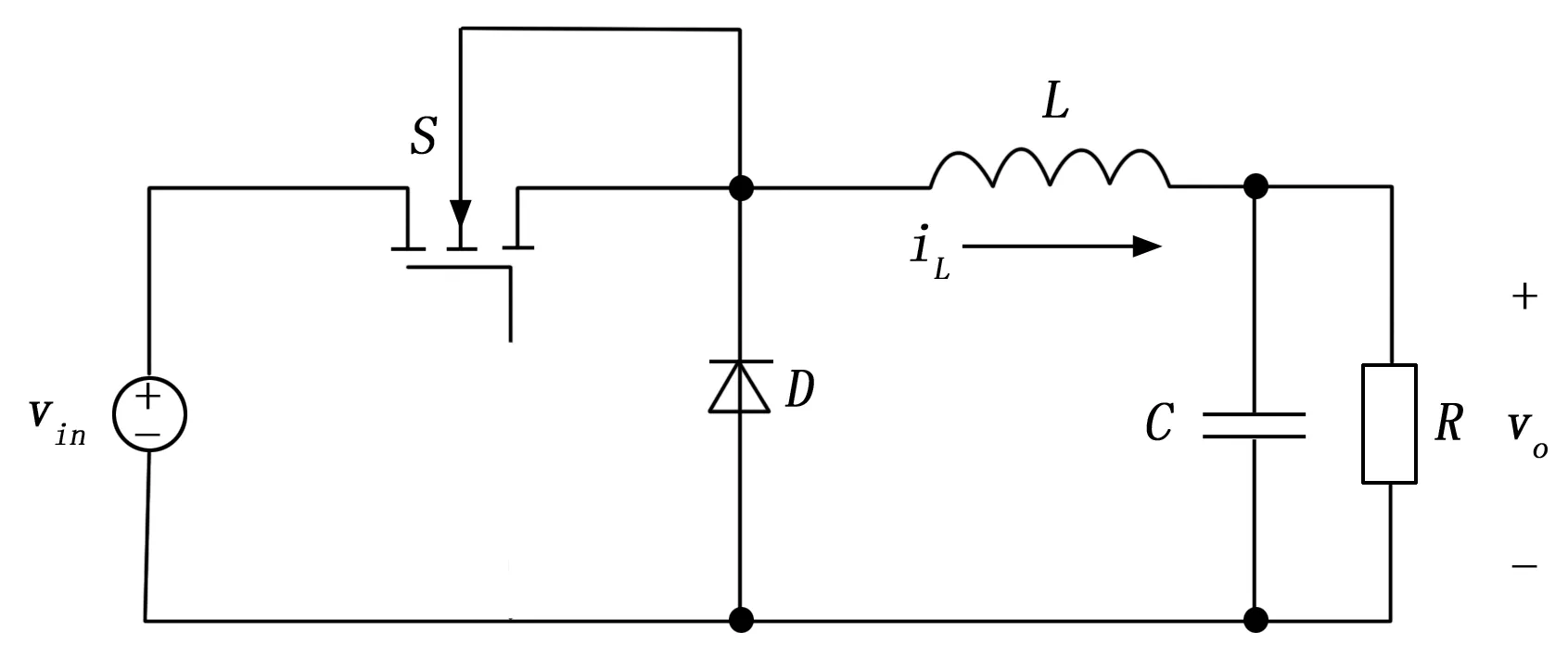
图1 Buck变换器电路图
定义输出电压误差:x
=v
-v
,其中v
为参考输出电压,则Buck电路的误差动态方程如下: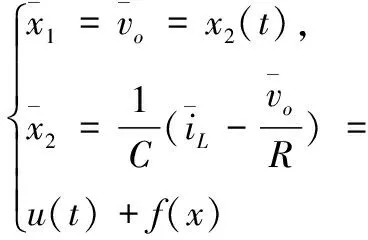
(2)
式中,

(3)
(4)
本文的控制目标是实现Buck型DC-DC变换器(1)的有限时间输出跟踪控制,即设计基于事件触发的有限时间控制器,保证输出电压有限时间跟踪到给定参考电压的同时减少不必要的通信资源浪费。
为了后续的设计和分析,给出如下定义和引理。
定义1:考虑如下系统


引理1:考虑如下系统



2 控制器设计和稳定性分析
本节将给出主要结果。首先提出有限时间控制器与事件触发机制设计结果,然后对闭环系统进行有限时间稳定性分析,最后讨论所设计的事件触发机制不会发生Zeno现象。
2.1 事件触发控制器的设计
在本小节,将给出有限时间控制器与事件触发机制设计方法。其中,反步法是一种递推的设计方法,通过若干步骤设计系统的控制器(不会超过系统的阶数)。本小节利用反步法设计整个系统的反馈控制律,首先构造如下坐标变换:


(5)

步骤1:构造如下Lyapunov函数

(6)


(7)
步骤2: 构造如下函数
V
(z
,z
)=V
(z
)+W
(z
)(8)


(9)
运用young不等式,对式(9)进行放缩可得:



(10)



(11)
为了后续分析设计简便,在本节中定义{t
,j
=1,2,…},t
<t
+1为触发序列,其中t
=0是初始的触发时刻。首先定义如下的事件触发误差:
(12)
且有事件触发机制设计如下:

(13)

(14)


(15)

(16)
2.2 闭环系统稳定性分析
基于上述分析,将总结以下定理证明所设计的控制方案能够保证Buck型变换器系统(1)的有限时间稳定性。
定理1:针对系统(1),在控制器(16)下,闭环系统的状态将在有限的时间内收敛到原点,即Buck变换器的输出电压能够有限时间收敛到给定值。
证明:当t
∈[t
,t
+1)时,根据式(4)、(5)以及事件触发控制器(16),可知式(11)中有下式成立:



(17)
又根据触发机制中的式(13)和式(14),可知在t
∈[t
,t
+1)时,有下式成立:
(18)


(19)

(20)

(21)
式中,a
=2(1-1(2-1))r
1((2-1)*),a
=21-1+(1-1(2-1))r
1((2-1)*)。将式(18)~(21)代入到(17),可以得到如下结论:

(22)
其中:
ε
=β
22-1((2-1)*)r
1((2-1)*)+


(23)
因此,将式(23)代入到式(11),可以得到:


(24)
其中:b
>0是一个常数。通过选取足够小的r
可以使得:
因此式(24)可以转换成:

(25)
根据young不等式有:

z
|+|z
|)(26)
结合式(25)和(26),可以得到如下结论:


(27)
根据式(27)、引理1以及定义1可知,闭环系统(1)是有限时间稳定的,即Buck变换器的输出电压可以有限时间收敛到给定的电压值。
注2:根据式(10)可知,参数τ
和虚拟控制器增益β
的选取决定了控制器增益β
的大小,进一步影响了r
的取值。又由式(27)和引理1可知,系统(1)的收敛时间也取决于τ
的大小。当τ
的值取得相对较小时,系统状态的响应速度也较快。结合事件触发机制(12)~(15)以及(24)可知,τ
的取值较大会增加事件触发的次数,进而会降低系统输出电压的收敛速度以及造成系统通信资源的浪费。2.3 Zeno现象的排除
由于事件触发的引入,需要考虑在执行所设计的事件触发控制方案时,系统中是否会发生Zeno现象,即考虑在一个事件触发区间内,系统是否会存在无穷次采样的现象。因此,结合上述定义的事件触发误差和所设计的事件触发方案,总结以下定理表明系统的事件触发区间间隔存在一个正的下界,即在本文所提出的控制方案下,系统不会产生Zeno现象。
定理2:考虑系统(1),在事件触发机制(12)~(15)和控制器(16)下,闭环系统不会发生Zeno现象,即系统的事件触发区间间隔存在正的下界d
,即t
+1-t
≥d
,j
=1,2,…。证明:当t
∈[t
,t
+1)时,事件触发误差e
(t
)关于时间的导数为:
(28)


(29)
根据z
(t
)的定义,有以下不等式成立:
(30)
其中:γ
>0是一个常数。所以,式(29)可以进一步改写为:
(31)
因此,可以推断出:
(32)
综上所述,触发区间间隔存在一个正的下界,即:
(33)
因此,排除了系统中Zeno现象存在的可能性,以上完成了定理2的证明。
注3:值得注意的是,本文构造了不同于文献[15-16]中所设计的事件触发误差:

3 仿真实例分析
为了验证本文所设计的事件触发有限时间控制方案的有效性,本节将给出Buck变换器的仿真结果。首先给出系统控制器设计步骤如下:
1)选择合理的参数τ
。2)选取虚拟控制器增益β
,结合参数τ
确定控制器增益β
的大小。3)基于所设计的事件触发方案,构造事件触发控制器(16)并计算占空比:

τ
,β
和β
的选取可能会影响事件触发的频率,以及系统状态的收敛速度,不宜过大或过小,应当结合输出电压的调节速率和事件触发发生的频率来权衡选择。
β
越大,Buck变换器输出电压收敛的越快,β
=10时输出电压收敛时间是在0.39 s,β
=5时输出电压收敛时间为1.57 s,β
=1.
5时输出电压收敛时间超过5 s。由此可见,同样的控制方案但是选择不同的参数,虽然均能实现控制目标,但是系统的响应速度受到影响。参数β
越大,输出电压的收敛速度越快。因此,参数β
的选取需要参考输出电压的收敛速度以及系统调节精度的要求。图3描述的是三组参数下Buck变换器中电感电流的变化情况,从图中可以看出,电感电流在有限时间内也达到了稳态,参数β
越大,电感电流的收敛速度也越快。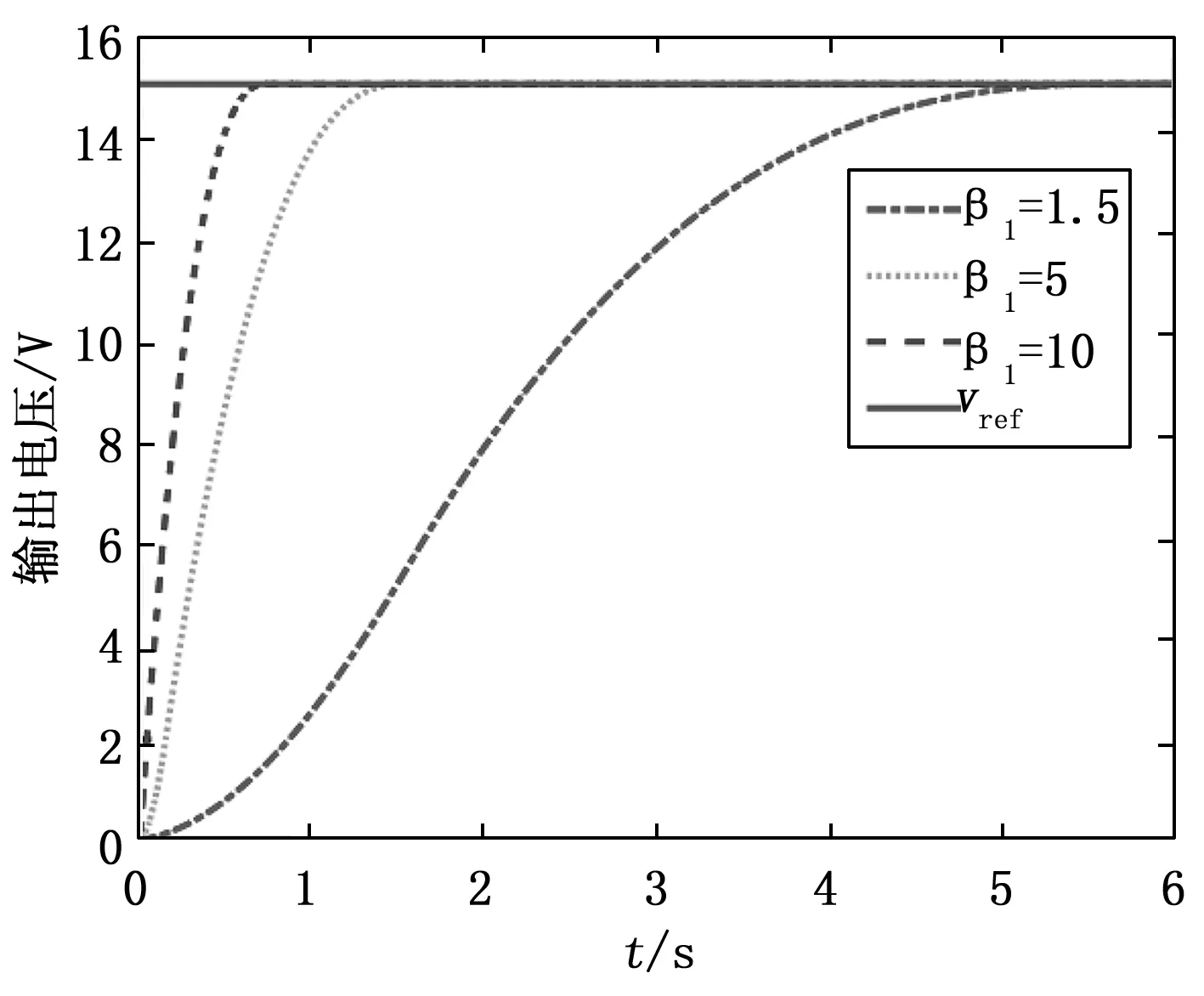
图2 系统的输出电压vo
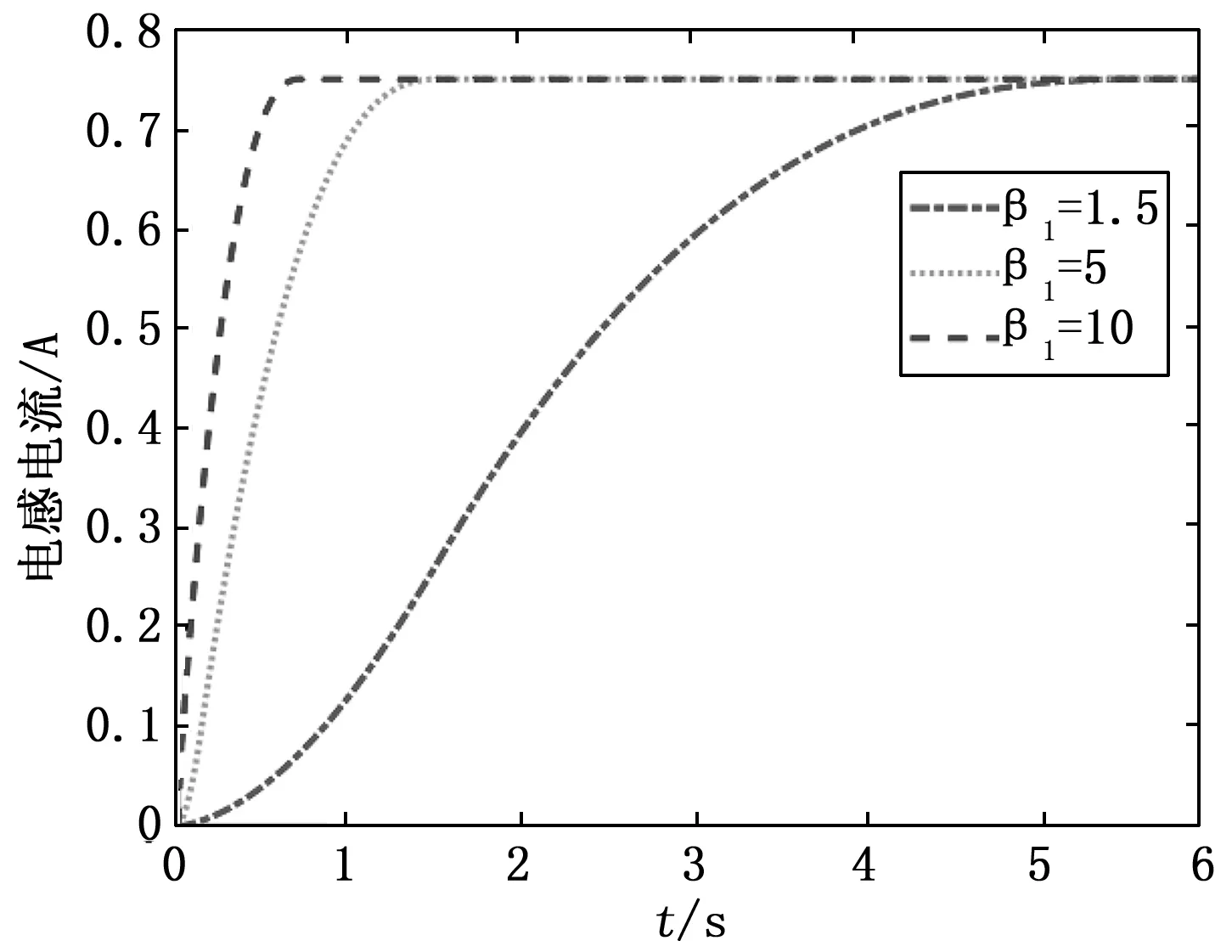
图3 电感电流iL
图4给出了参数β
=10下系统的触发时刻和事件触发间隔的仿真结果,可见在0.39 s内仅发生了41次事件触发,避免了控制输入信号连续传输,由于在0.39 s之后系统已达到有限时间稳定,故0.39 s之后不再发生事件触发。同时每次事件触发间隔均大于0,表明所提出的事件触发方案有效地节省了系统的通信资源,也避免了Zeno现象的发生。图5给出了三组参数下所设计的基于事件触发方案下的占空比。可以看出占空比均在有限时间内达到一个恒定值。仿真结果表明,本文所提出的事件触发控制方案不仅能够很好的保证系统的有限时间稳定性,实现系统输出电压的有限时间跟踪,还能有效地利用系统的通信资源,从而避免不必要的浪费。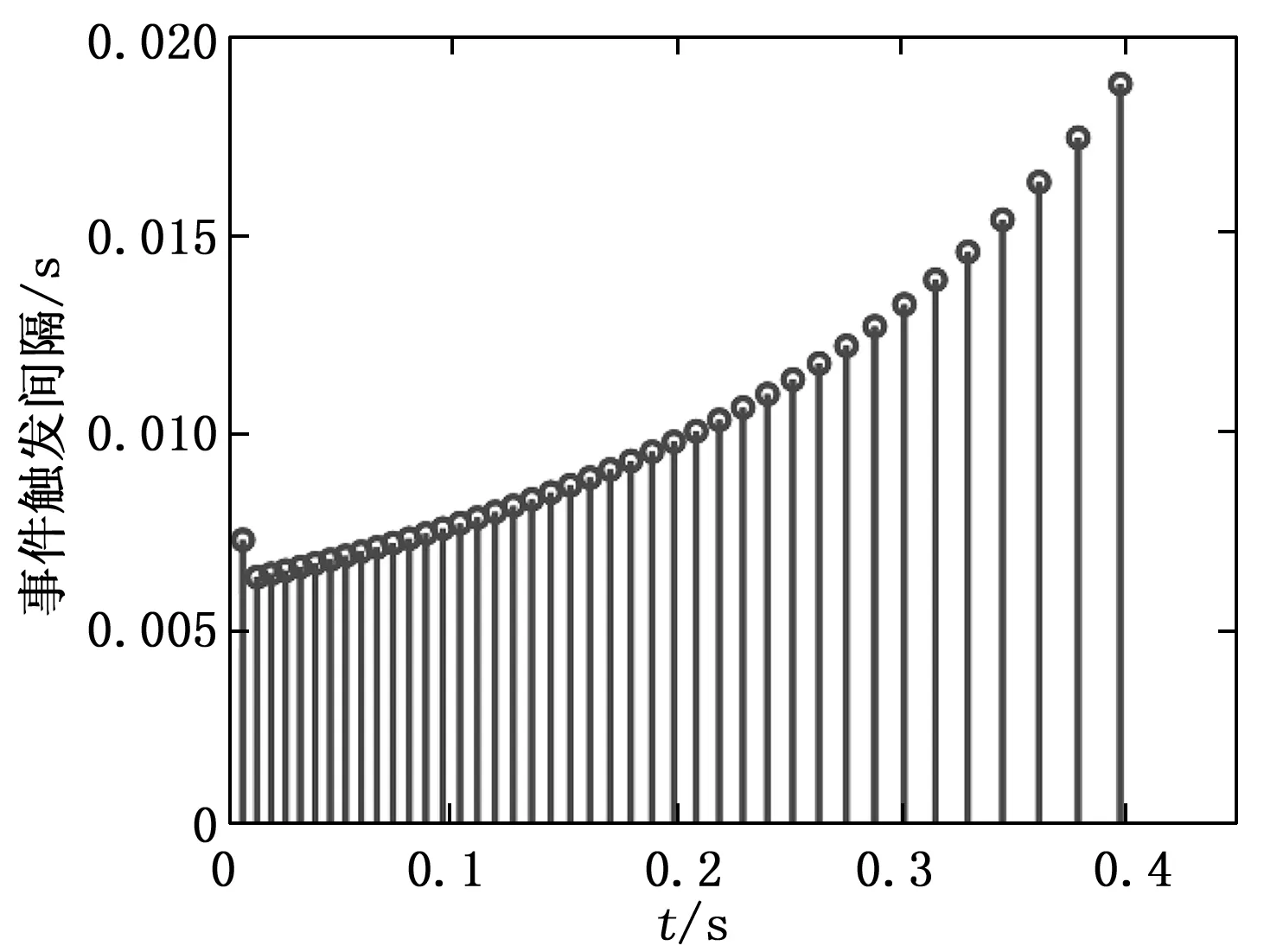
图4 事件触发机制(β1=10)
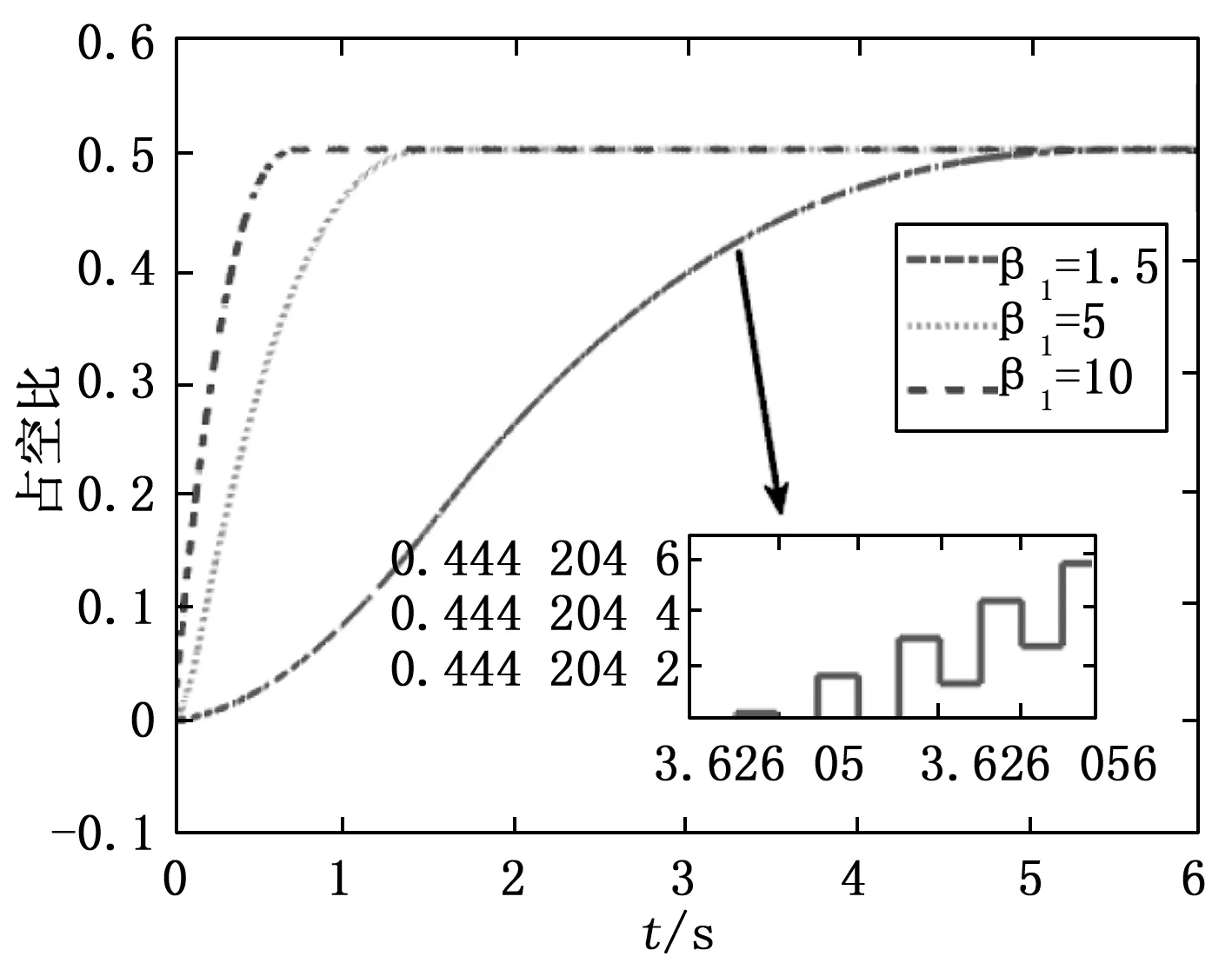
图5 占空比μ(t)
4 结束语
本文针对Buck型DC-DC变换器,提出了一种基于事件触发的有限时间控制器设计方法。采用反步法设计了一种事件触发机制和有限时间状态反馈控制器。通过理论分析证明了所提出的控制方案在减少不必要的通信资源浪费的同时,也保证了Buck变换器的输出电压在有限时间内收敛到给定的参考电压,也证明了闭环系统不会存在Zeno现象。最后,仿真结果说明了本文所提出的控制方案的有效性。在未来工作中,我们将考虑把本文提出的事件触发有限时间控制方案推广到具有不确定参数或者负载未知的Buck变换器。
猜你喜欢
中学生数理化·中考版(2018年10期)2018-12-07 00:44:48
黑龙江电力(2017年1期)2017-05-17 04:25:05
中学生数理化·中考版(2016年10期)2016-12-22 18:28:46
环境科技(2016年5期)2016-11-10 02:42:12
电子制作(2016年21期)2016-05-17 03:52:45
电测与仪表(2016年11期)2016-04-11 12:21:12
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17