
基于多传感器的无人机位置估计算法
2022-05-30 08:46齐晓轩尹强李玉炫
计算机与网络 2022年14期
齐晓轩 尹强 李玉炫
摘要:针对单一传感器无法准确地估计无人机空间位置的问题,提出了一种基于多传感器信息融合的位置估计算法。该算法采用多元信息融合方法,利用一类通用的微传感器,例如加速度传感器、气压传感器的测量信息进行积分估计无人机当前位置,引入GPS信息实时修正位置估计值,从而得到相对准确的位置估计值。通过仿真实验验证了算法的有效性,并进行了实物飞行测试实验。仿真结果表明,加入信息融合算法后对四旋翼无人机的控制精度提高了约60%。
关键词:位置估计;信息融合;传感器;GPS
中图分类号:TP212.9文献标志码:A文章编号:1008-1739(2022)14-58-5

0引言
随着低成本、高性能微处理器和微传感器系统的普及,四旋翼无人机的研究也受到了国内外研究机构的广泛关注[1]。由于四旋翼无人机复杂的系统模型与多变量耦合的特性,使得四旋翼无人机的位姿控制一直是研究热点与难题。为了实现高精度的位置控制,需要准确地获取四旋翼无人机运动状态与空间位置信息。传统的位置估计算法往往通过单一传感器获取无人机的运动状态,同时引入卡尔曼滤波等算法实时估计无人机的空间位置信息[2]。其使用的传感器主要包括3类:MEMS(Micro Electro Mechanical System)加速度传感器、气压传感器和GPS。然而,这三类传感器存在固有的缺陷,单一的传感器信号无法准确地估计出无人机的空间位置,因此需要信息融合算法融合这3类传感器信号,达到位置估计更精确、控制精度更佳的目的。
近年来,针对这3类传感器的信号融合问题,国内外学者已经有了一些研究成果。文献[3-4]分析了MEMS加速度传感器信号的特点,总结了影响传感器信号的各种干扰因素,其中包括工作环境、生产加工工艺等内外因素。文献[5-6]提出了GPS信號传输的滞后性,这种滞后性大大影响了无人机的位置估计精度。文献[7-8]使用了一种基于卡尔曼滤波的信息融合算法,融合了加速度传感器与GPS采集的信息进行位置估计,文中实验表明,该位置估计算法相较于使用单一加速度传感器进行的位置估计值随机噪声较低,从而使得控制精度提高。而文献[9]使用一种SPKF(Sigma-Point Kalman Filters)算法,弥补了卡尔曼滤波的不足,在进行2种传感器信息融合的过程时表现出了更好的效果。文中实验表明,相比于卡尔曼滤波算法,该SPKF算法减少了30%的位置估计误差。为了应对这种问题,本文设计了一种普适性更高的信息融合算法,相对于卡尔曼滤波算法迭代简单、计算量低,能够更好地应用到实际工程中。该算法将实时获得的加速度信息进行补偿修正,利用修正后的加速度信息进行积分估计无人机速度,再积分求得位置估计值。这种积分估计方法计算量较低,适用于各类微控制器。
1无人机坐标系统建立
四旋翼无人机的控制在世界范围内得到了广泛的研究,利用GPS,IMU等一类的传感器进行位姿估计或自主导航,而这些研究的基础是无人机坐标系统的建立,本文建立的无人机坐标系模型如图1所示。




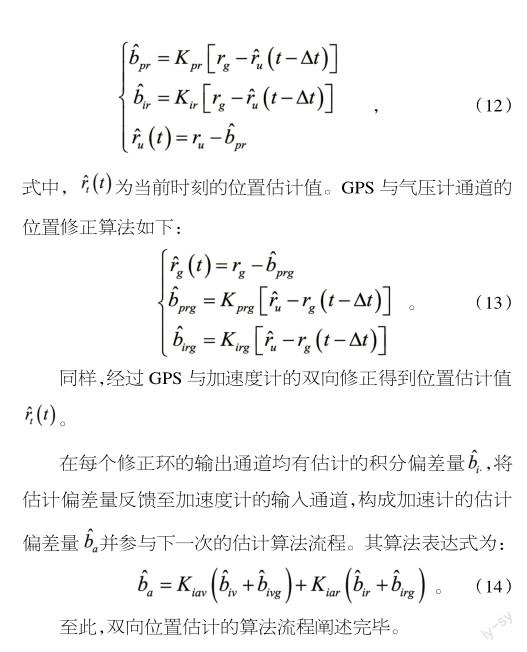
以上主要描述了位置估计算法流程,GPS采集经纬度信息经过上文数据转换与坐标系统转换得到当前无人机在惯性坐标系下的水平位置。对于无人机的高度位置估计,只需将当前的气压计信号测量值传输至双通道位置修正环中,即可得到高度位置估计值。
综上,本算法将加速度计通道、GPS通道与气压计通道进行互补修正,将彼此的测量值与对方前一时刻的测量值作差得到偏差估计量,并反馈至各自通道中完成互补修正,从而提高无人机系统对当前位置估计的精确度。
4实验验证与分析
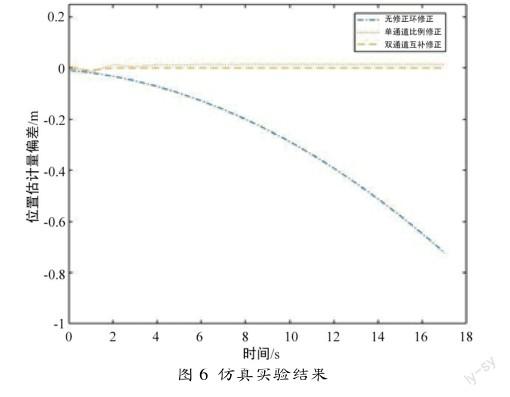
为了验证本文算法的有效性,仿真了3组实验,算法1仅仅通过加速度计积分进行位置估计。算法2引入加速度计通道修正环和,调节比例系数和。算法3采用双通道修正,将加速度计通道与GPS通道的偏差量反馈至主回路,调节各修正环的比例系数和,以及反馈回路的积分系数和。实验结果如图6所示。
仿真实验结果表明,当加速度计在没有修正环修正时,位置估计量会随着时间的累积呈指数形式增加,验证了上文中偏差量累积公式推导的真实性。如图6所示,当加入单通道修正环时,通过调节比例系数将抑制位置估计的偏差量发散,然而仅仅依靠单通道的比例调节算法难以消除位置估计的稳态误差。当引入GPS双通道积分修正项时,不仅能够抑制累积误差的发散情况,而且在一定程度上能够降低稳态误差。同时,单通道的收敛速度要小于双通道的收敛速度。
为了进一步验证算法在实际应用的有效性。本文应用MPU9250惯性传感器获取加速度信息以及通过内部BMP280芯片获取气压信息,利用GPS定位接收模块获取GPS经纬度信息。本文应用上述传感器搭建四旋翼无人机进行了飞行测试实验。给定无人机在空间中的飞行目标轨迹,并分为加入本文算法前后2组位置估计算法进行飞行,实验结果如图7~图9所示。
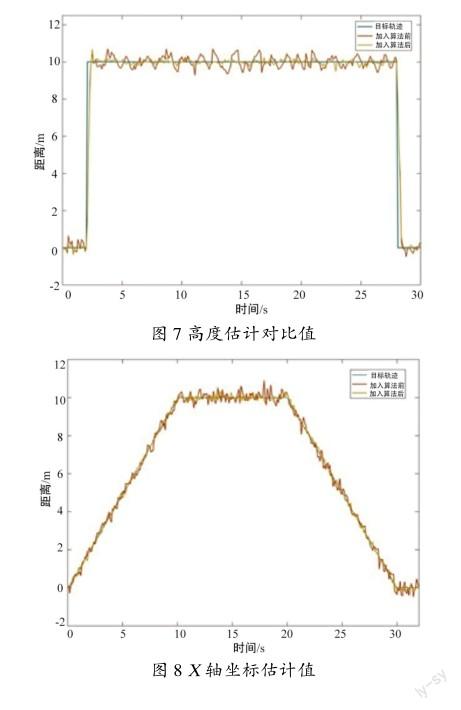
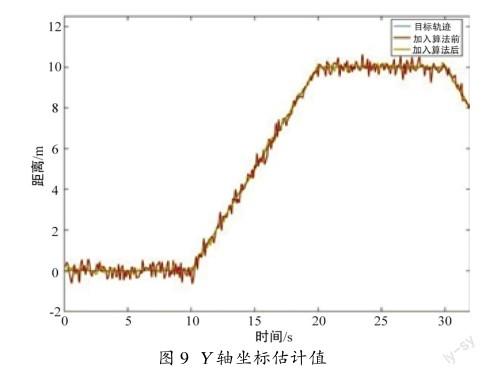
由于數据量较大,在飞行结束后以相同的时间周期各提取了400个位置估计数据。由图7~图9中实验数据可知,加入算法前的高度估计波动幅值约为1 m,加入算法后高度估计波动幅值约为0.4 m,控制精度提高了大约60%。加入算法前的水平位置估计波动幅值约为1.2 m,加入算法后高度估计波动幅值约为0.5 m,控制精度提高了大约58%。实验证明了在加入本文算法之后抓取无人机的控制精度有所提高。
5结束语
本文设计了一种基于多传感器的信息融合算法,解决无人机空间位置估计不准确的问题。该算法将IMU作为主通道,气压计、GPS作为副通道进行主副通道双向修正的方法降低位置估计偏差值。本文通过仿真实验证明,该算法在单通道修正时能够成功抑制加速度传感器的累积误差使估计值收敛,在双通道修正时能够大大降低稳态误差。最后为了进一步证明该算法的有效性,通过飞行测试验证了加入本文算法后对四旋翼无人机在,,轴方向上的控制精度提高了大约60%。
参考文献
[1]王成,杨杰,姚辉,等.四旋翼无人机飞行控制算法综述[J].电光与控制,2018,25(12):53-58.
[2] MAHONY R,KUMAR V,CORKE P. Multirotor Aerial Vehicles:Modeling,Estimation,and Control of Quadrotor[J]. IEEE Robotics & Automation Magazine,2012,19(3):20-32.
[3]李荣冰,刘建业,段方,等.MEMS-INS微型飞行器姿态确定系统的实现研究[J].应用科学学报,2006(6):618-622.
[4]刘军,袁俊,蔡骏宇,等.基于GPS/INS和线控转向的农业机械自动驾驶系统[J].农业工程学报,2016,32(1):46-53.
[5]蔡磊,牛小骥,张提升,等.MEMS惯导在旋翼飞行器中导航性能的实验分析[J].传感技术学报,2016,29(5):711-715.
[6]杨波,王跃钢,徐洪涛.高速飞行环境下卫星导航信息滞后补偿方法[J].中国惯性技术学报,2011,19(3):293-297.
[7] MAMMARELLA M,CAMPA G,NAPOLITANO M R,et al. Machine Vision/ GPS Integration Using EKF for the UAV Aerial Refueling Problem[J].IEEE Transactions on Systems,Man,and Cybernetics,Part C:Applications and Reviews,2008,38(6):791-801.
[8]罗栋,何国民,刘俊景.基于回路反馈法修正的四旋翼位置估计算法研究[J].山东工业技术,2019(4):168.
[9] OH S M,JOHNSON E N. Development of UAV Navigation System Based on Unscented Kalman Filter[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit. Keystone:AIAA,2006:6763-6783.
[10]唐娅娟,王晶,所玉君,等.无人机改进导航定位方法设计[J].科技与创新,2017(4):23-25.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
中国新通信(2016年21期)2017-01-06
现代电子技术(2016年22期)2016-12-26
亚太教育(2016年35期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
