
数字阵列通道幅相误差实时校正方法
2022-05-30 10:48:04凌子涵孙慧峰
中国新通信 2022年13期
关键词:粒子群算法
凌子涵 孙慧峰


摘要:本文对数字阵列通道幅相误差的产生及影响进行了分析与讨论,并给出了基于Remez算法和粒子群优化算法的复系数FIR校正滤波器设计方法,最后通过仿真验证了算法的有效性与工程价值。
关键词:数字阵列;幅相误差;复系数FIR滤波器;粒子群算法
一、引言
数字阵列天线是在传统相控阵天线的基础上,引入A/D转换器、数字T/R组件等数字化器件,并结合数字波束形成技术和数字处理技术而出现的新型阵列天线。与传统阵列相比,具有大动态范围、自适应空间干扰抑制、同时多波束形成等优点,在现代雷达中得到了广泛的应用[1]。
宽带数字阵列的每一个通道都包含一个数字T/R组件,其中模拟器件的存在必将导致通道内部的幅相特性与理想特性发生偏离,且随着外部环境因素的变化而变化,导致通道之间的幅相特性产生较大的差异,从而引起通道失配。阵列信号处理的一个前提假设是各通道频率特性时刻保持一致,当通道间出现失配时,后续数字波束形成效果会受到严重影响,出现主瓣展宽、旁瓣升高等,从而导致雷达检测性能的下降[2-3]。
数字阵列通道误差的校正主要分为预失真校正和实时滤波校正,预失真校正方法通过在系统中加入频率特性与失真特性相反的模块,保证信号线性放大来实现幅相误差校正,具有简单灵活、精确度高等优点,但无法对接收信号进行实时校正,且预失真校正只能对相位误差进行校正而无法对幅度误差进行校正。实时滤波方法则是通过提取误差通道的幅相特性,并引入一个对应频率特性的数字FIR滤波器对误差进行校正。FIR滤波器结构简单,易于控制,但实系数FIR滤波器会在整个频带上产生较大的群延迟,且幅相特性总是对称,因此需要设计复系数FIR滤波器对幅相误差进行校正[4-5]。
本文首先分析了通道幅相误差模型及其对阵列性能的影响,接着讨论了通道幅相误差的提取方法,之后研究了复系数FIR滤波器设计方法并使用粒子群算法进行优化,最后分析了实际的校正效果。
二、幅相误差模型及影响分析
要定量得研究通道幅相误差校正方法,则需要为通道幅相误差建立一个数学模型,用以描述通道的失配程度,该数学模型应能够较为准确地反映出通道幅相误差造成的通道失配情况,并且应较方便于进行仿真分析。目前通道幅相误差校正方法的研究中,常用的误差模型以下几种:系统函数模型、FIR滤波器系数随机扰动模型、IIR滤波器零极点扰动模型、滤波器级联模型等。
在表述一个系统的频率特性时,最简单且直观的做法是,就是写出该系统的频率响应函数,因此,在描述通道的频率特性时,最直接的方法就是写出其频率响应函数。将传输通道视为一个独立的系统,根据信号与系统的知识,要使通道实现无失真传输,则通道频率响应的幅度特性应为常数,相位特性为关于频率的一次函数,即
对于一个失真通道,假设其频率响应函数为:
(1)
其中A(ω)为幅频响应,B(ω)为相频响应,其中幅频特性采用谐波建模,即
(2)
相频特性采用多项式建模
(3)
上述两展开式中,求和式中第n项被称作n次畸变,畸变次数越高,波动就越为剧烈,在通道校正的研究中,为简化分析通常只保留常数项和一次畸变,而忽略掉更高次畸变。根据成对回波理论,幅度误差的存在会在主瓣两侧产生符号相同的成对回波,相位误差的存在会在主瓣两侧产生符号相反的成对回波。
系统函数模型是通过调整通道幅相特性的波动来描述通道特性的,这一模型简单直观,能够直接反映出通道的失配情况,而且便于理论分析与推导,但该模型的缺陷在于忽视了带外响应,因此与现实情况中的通道有一定的差别。目前在数字阵列校正技术的研究中,大多采用系统函数模型进行仿真与分析。
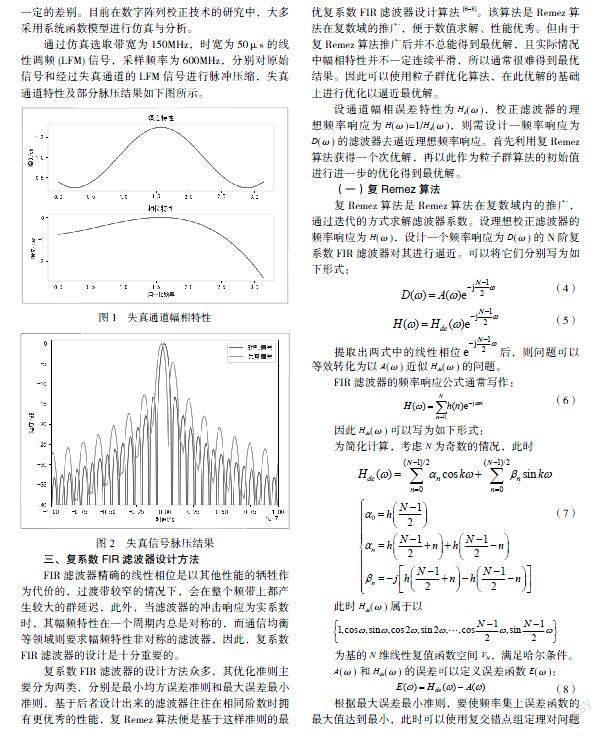
通过仿真选取带宽为150MHz,时宽为50μs的线性调频(LFM)信号,采样频率为600MHz,分别对原始信号和经过失真通道的LFM信号进行脉冲压缩,失真通道特性及部分脉压结果如下图所示。
三、复系数FIR滤波器设计方法
FIR滤波器精确的线性相位是以其他性能的牺牲作为代价的,过渡带较窄的情况下,会在整个频带上都产生较大的群延迟,此外,当滤波器的冲击响应为实系数时,其幅频特性在一個周期内总是对称的,而通信均衡等领域则要求幅频特性非对称的滤波器,因此,复系数FIR滤波器的设计是十分重要的。
复系数FIR滤波器的设计方法众多,其优化准则主要分为两类,分别是最小均方误差准则和最大误差最小准则,基于后者设计出来的滤波器往往在相同阶数时拥有更优秀的性能,复Remez算法便是基于这样准则的最优复系数FIR滤波器设计算法[6-8]。该算法是Remez算法在复数域的推广,便于数值求解、性能优秀。但由于复Remez算法推广后并不总能得到最优解,且实际情况中幅相特性并不一定连续平滑,所以通常很难得到最优结果。因此可以使用粒子群优化算法,在此优解的基础上进行优化以逼近最优解。
设通道幅相误差特性为Hd(ω),校正滤波器的理想频率响应为H(ω)=1/Hd(ω),则需设计一频率响应为D(ω)的滤波器去逼近理想频率响应。首先利用复Remez算法获得一个次优解,再以此作为粒子群算法的初始值进行进一步的优化得到最优解。
(一)复Remez算法
复Remez算法是Remez算法在复数域内的推广,通过迭代的方式求解滤波器系数。设理想校正滤波器的频率响应为H(ω),设计一个频率响应为D(ω)的N阶复系数FIR滤波器对其进行逼近。可以将它们分别写为如下形式:
(4)
(5)
提取出两式中的线性相位后,则问题可以等效转化为以A(ω)近似Hde(ω)的问题。
FIR滤波器的频率响应公式通常写作:
(6)
因此Hde(ω)可以写为如下形式:
为简化计算,考虑N为奇数的情况,此时
(7)
此时Hde(ω)属于以
为基的N维线性复值函数空间VN,满足哈尔条件。
A(ω)和Hde(ω)的误差可以定义误差函数E(ω):
(8)
根据最大误差最小准则,要使频率集上误差函数的最大值达到最小,此时可以使用复交错点组定理对问题进行求解。
复交错点组定理是交错点组定理在复数域上的推广,其可以表述为,设VN为以连续实函数为基的n维线性复值函数空间,并满足哈尔条件,Hde (ω)∈VN,如果至少存在N+1个按升序排列的极值点ω0<ω1<…ωN-1<ωN,使误差函数E(ω)=Hde(ω)-A(ω)满足
(9)
即误差函数在其极值点处取得最大误差,且极大值极小值为正负交替分布时,A(ω)是Hde (ω)关于VN的最佳逼近,其中极值点组[ω0,ω1,…,ωN]称为交错点组。
线性空间VN满足哈尔条件确保了频带B上的最优解是唯一的,且此时逼近误差函数的极值点至少有n+1个。但复交错点组定理通常只能获得次优解而非最优解,其原因在于推广后的复交错点组定理,其条件是由充要条件退化为了充分不必要条件。
将误差函数极值点处的误差称为交错误差,记为δ,则最佳逼近误差可以写为如下形式:
(10)
其中W(ωk)为加权函数,将上式变形并展开为矩阵形式则有
(11)
求解上述方程,即可获得逼近函数Hde (ω)的系数αn、βn以及交错误差δ,由此即可计算出当前的逼近函数Hde(ω)和此时的误差函数E(ω),此时构建辅助误差函数如下:
(12)
其中m为当前迭代次数,θδ为逼近误差δ的相位,利用辅助误差函数R(ω)对交错点组进行更新。选取当前误差函数中n+1个最大的极值点构成新的点组,并判断当前点组与上次迭代时的点组是否发生变换,如果发生了变换则用新的点组继续进行迭代,直到极值点位置不再变化为止,此时如果误差函数的范数不大于交错误差δ,且极值点呈正负交替分布,获得逼近问题的最优解,否则为次优解。
(二)粒子群优化算法
在利用复Remez算法获得逼近问题的次优解后,可以利用智能优化算法对其进行优化以获得最优解。粒子群优化算法是一种基于群体(这里称作粒子群)与适应度的群智能优化算法,通过适应度将群体中的个体(这里称作粒子)移动到好的区域以优化问题。其更新方程写为:
xi(n+1)=xi(n)+vi(n+1)
vi(n+1)=ωvi(n)+c1r1(pbesti-xi(n))+c2r2(gbest-xi(n)) (13)
其中n为迭代次数,c1和c2为加速因子,ω为惯性权重,r1、r2为区间[0,1]内服从均匀分布的随机数。
FIR滤波器的设计问题即是选取滤波器系数h(n)使得误差达到最小,这是一个组合优化问题,可以使用粒子群算法对问题进行优化。
将复FIR滤波器的系数作为粒子的位置,由滤波器系数即可求得此时滤波器的频率响应函数,理想滤波器的频率响应函数为,则均方误差可以表示为
(13)
在实际情况中幅相特性通常并不连续平滑,因此以均方误差作为适应度函数,显然均方误差的值越小,对应滤波器的性能就越优秀,算法流程如下。
首先由复Remez算法计算出次优解时的滤波器系数,并以此作为中心在限定范围R内随机生成群体数量为N的粒子,初始化算法参数c1、c2和ω,并通过上述两式对粒子、最优值和适应度进行更新,当算法结束后,适应度最小的粒子所代表的参数就是算法的最优解,即最优FIR滤波器的系数。
四、幅相误差校正仿真
使用上节所述基于复Remez的粒子群算法设计阶数为11阶的FIR校正滤波器,通道失真特性与校正滤波器特性的对比及误差如图3所示,校正滤波器的幅度响应误差峰值为0.15dB,相位误差峰值为0.068rad。
使用设计的FIR校正滤波器对失真信号进行校正,校正后的通道幅相特性如图4所示,理想信号与校正后信号的脉冲压缩结果如图5所示。可以看出即使在滤波器阶数较小(11阶)时,依然可以得到较为优秀的校正效果,此时对校正后的LFM信号进行脉压,3dB时宽为4.2810-3μs,峰值旁瓣比为-13.8dB,积分旁瓣比为-9.45dB,理想LFM信号脉压的理论值,3dB时宽4.2810-3μs,峰值旁瓣比-13.3dB,积分旁瓣比-9.63dB非常接近。FIR滤波器的成本随着阶数的提升而增加,通过本文提出的算法可以在较低的阶数下实现较好的校正效果,有利于工程应用与实现。
五、结束语
数字阵列相较于传统阵列有着不可忽略的优势,但模拟器件的引入同时也带来了通道幅相误差,从而严重影响阵列的性能,因此通道幅相误差校正方法具有重要的研究意义。
传统的实系数FIR滤波器虽然结果简单,便于设计,但也有着阶数要求高,无法实现非线性相位等缺点,因此需要有效的算法来设计幅度非对称、相位非线性的复系数FIR滤波器。本文提出的复Remez算法与粒子群算法相结合的复FIR滤波器设计算法,能够在较低阶数下对通道的幅相误差进行有效校正,具有工程应用与实现价值。
作者單位:凌子涵 中国科学院空天信息创新研究院
中国科学院大学电子电气与通信工程学院
孙慧峰 中国科学院空天信息创新研究院
参 考 文 献
[1]陶赞兆.宽频带LFM相控阵雷达通道均衡及波束形成研究[D].电子科技大学,2020.
[2]李畅,张志敏.SAR系统收发通道幅相误差实时校正[J].计算机与现代化,2019.9(2):44-49.
[3]冉涌.宽带数字阵列雷达通道校正技术[D].电子科技大学,2010.
[4]葛建军,张春城.数字阵列雷达[M].电子工业出版社,2017.
[5]何志华,陈镜,董臻.SAR回波信号模拟器幅相误差实时校正方法[J].雷达科学与技术2011,9(2):125-129.
[6] T.W.Parks, J.H.McClellan. Chebyshev Approximation for Nonrecursive Digital Filters with Linear Phase[J]. Circuit Theory, vol. CT-19, pp. 189-194, Mar. 1972.
[7] L.J. Karam, J.H. McClellan. Complex Chebyshev approximation for FIR filter design[J]. Circuits and Systems II 42 (March 1995) 207-216.
[8] L.J. Karam, J.H. McClellan. Chebyshev digital FIR filter design[J]. Signal Processing 76 (1999) 17-36.
猜你喜欢
软件导刊(2017年1期)2017-03-06 21:00:02
电子技术与软件工程(2017年1期)2017-03-06 20:38:07
电脑知识与技术(2016年30期)2017-03-06 20:13:33
现代电子技术(2017年3期)2017-03-04 21:34:52
现代电子技术(2017年3期)2017-03-04 08:19:58
中小企业管理与科技·中旬刊(2016年11期)2017-02-17 17:21:18
南水北调与水利科技(2016年5期)2016-12-27 14:57:39
预测(2016年5期)2016-12-26 10:04:59
电脑知识与技术(2016年12期)2016-06-14 19:27:24
商(2016年5期)2016-03-28 18:10:26
