基于WiFi的室内目标检测与定位方法
2022-05-30 13:56韩雨彤李航朱光旭陆彦辉
中兴通讯技术 2022年5期
韩雨彤 李航 朱光旭 陆彦辉
摘要:提出了一种基于WiFi的室内目标检测与定位方法。采用连续多路径干扰消除的方法为多维参数估计提供初始化值,对估计出的多维参数进行特征提取和分类,可以识别出室内有无目标以及目标的状态。通过信道参数实现目标位置估计,并根据室内地标来校准位置。实验结果表明,提出的定位算法平均误差为0.825 2 m,可有效提高定位的准确度。
关键词:信道状态信息;多维参数估计;目标检测;目标定位
Abstract: An indoor target detection and localization method based on WiFi is proposed. The method of continuous multi-path interference elimination is used to provide the initial value for multi-dimensional parameter estimation, and the feature extraction and classification of the estimated multi-dimensional parameters can identify whether there is a target in the room or not and the states of the target. The target lo? cation is determined from the estimated channel parameters, and the location is calibrated according to indoor landmarks. Experimental re? sults show that the average error of the proposed localization algorithm is 0.825 2 m, which can effectively improve the location accuracy.
Keywords: channel state information; multi-dimensional parameter estimation; target detection; target localization
室内定位服务是很多技术应用的基础,包括虚拟现实、智能家居、导航等。基于WiFi的定位系统[1-2]因具有低成本、部署广泛的优点成为了一种热门的定位技术。
根据采集信号的不同,基于WiFi的室内定位技术可分为基于接收信号强度(RSS)和基于信道状态信息(CSI)[3]两类方法。RSS作为一种粗粒度信息,难以提供准确可靠的信息用于定位。作为一种细粒度信息,CSI可以获取更多的信息来提高定位精度。通过部署设备获取信道状态信息,系统根据CSI计算出到达角(AoA)、飞行时间(ToF)、多普勒频移(DFS)等参数,进而可以通过算法确定目标的位置。
目前,有许多研究通过获取CSI实现对人员的位置估计。WU等[4]提出了一种鲁棒的WiFi无设备室内运动跟踪系统,利用CSI的比值提取多普勒频移,并通过组合最佳视图以实现鲁棒的轨迹重建。实验表明,提出的方法平均跟踪误差小于2.5%。ALEJANDRO等[5]通過基于Nelder-Mead搜索的角度估计器和细粒度飞行时间测距系统实现了定位。实验表明,即使在收发设备之间有障碍物遮挡的非视距场景下,该系统性能比当时最先进的定位系统仍高出2~3倍。YANG等[6]提出了一种基于二维多包矩阵束的WiFi定位方法。该方法联合估计AoA和ToF,并且累积多个CSI数据包来提高参数估计精度。实验表明,提出的方法可以实现0.42 m的定位精度。
上述几种方法需要部署多个接入点(AP)或至少两条链路来进行定位和跟踪。在仅有一组收发设备部署的场景中,现有的一些研究工作大多利用CSI的多参数联合对目标进行位置估计。QIAN等[7]提出了单链路的WiFi被动定位系统Widar2.0,该系统将CSI建模成关于幅度衰减、DFS、ToF、AoA的函数后进行多参数联合估计,并利用图匹配技术得到目标反射路径的长度与目标的方位信息的最优解。结果表明,Widar2.0实现了0.75 m的中值定位精度。JIN等[8]设计了一个多维参数估计器,通过优化路径组件的完整数据来细化路径参数,并且提出了基于匈牙利卡尔曼滤波的跟踪方法。实验结果表明,所提出的系统在室内的平均定位误差为0.82 m。LIU等[9]分别估计反射信号的ToF和AoA来定位目标,在典型的室内环境中该系统的中位数定位误差可以达到0.75 m。
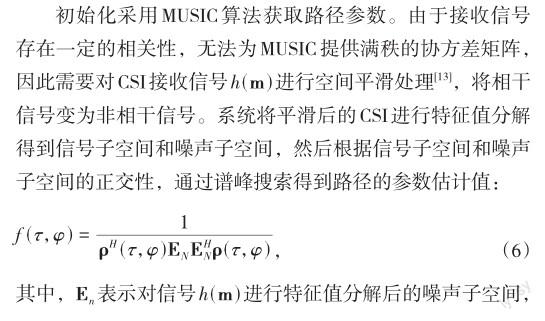
在实现多维参数估计的方法中,空间交替广义最大化[10](SAGE)是一种广泛应用的方法。SAGE是期望最大化(EM)的扩展,它可通过迭代搜索的方式实现参数估计。然而,这种迭代算法受初始值影响较大,倘若初始值设置不恰当,将会产生计算复杂度高和局部最优解的问题。Widar2.0采用全零初始化方法。这种初始化方法虽然较为简单,但是通常需要更多的迭代次数才能达到收敛,并且无法保证达到全局最优解。文献[11]采用连续干扰消除作为初始化方法,但是这种方法的缺点是,每次估计的信号误差会被不断积累。文献[12]采用三维多信号分类(MUSIC)的初始化方法。然而,三维MUSIC的谱峰搜索时间复杂度很高,并且难以分解出能量相近的反射路径。另外,以上研究均没有考虑是否存在室内目标以及目标的状态,也没有利用多维参数得到丰富的室内信息。
本文提出了一种基于WiFi的室内目标检测与定位方法,不仅可以识别目标的状态,还可以得到目标的位置信息。本文主要贡献如下:(1)针对室内复杂环境的多维参数估计,提出了一种改进的参数初始化方法。该方法为SAGE提供初始值,实现了多维参数联合估计。(2)在参数估计的基础上,利用机器学习的方法对目标进行检测,识别出室内有无目标以及目标的状态(静止或运动)。(3)在目标运动的状态下,利用估计出的信道参数进行定位,并结合室内地标校准位置。
1系统模型
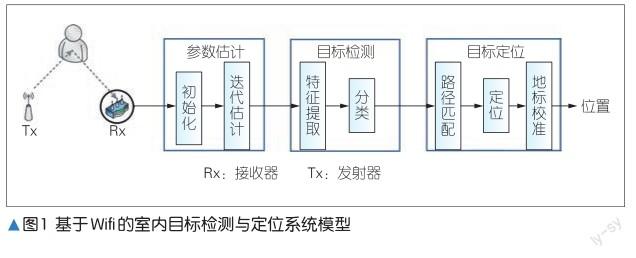
本文的目标是实现单链路下的目标被动检测与跟踪,系统模型如图1所示。系统前端由一对收发设备组成,负责接收CSI数据。在收集到原始数据之后,系统首先进行信道参数估计,包括参数初始化和迭代估计。初始化可以给出信道参数的粗略估计,迭代估计可以得到信道参数的准确估计。之后系统利用估计的信道参数进行特征提取,并将其输入到分类器中,以识别室内有无目标以及目标的状态。最后系统将目标运动状态下的多个时刻、多条路径的参数进行路径匹配,找到目标反射的关联路径,再用该条路径的参数对目标进行定位,并使用地标校准位置。
由于室内环境的复杂性,发射器与接收器之间存在多条路径信号,包括直射路径信号、反射路径信号和折射路径信号。
为了求解上述似然估计问题,本文采用SAGE算法。该算法在每一次迭代时仅需要重新估计Θ的一个子集(其他分量的估计不变)。因此,我们可以将Θ的估计分为多个单独参数的估计,依次优化每条路径的参数,进而降低计算的复杂度。
如果多径路径信号中包含两个相似的信号,并且没有先验知识,那么该算法可能会存在局部极小值问题。因此该算法需要一个相对准确的初始值,否则会导致收敛速度慢或者存在局部极小值问题。
2.1初始化
准确的初始化值有利于SAGE算法后续的迭代过程。连续干扰消除是一种广泛应用的初始化方法,但是连续干扰消除易造成误差累积。为了减少误差累积的次数,本文先采用连续多路径干扰消除的方法为信道参数估计提供一个粗略估计,采用MUSIC获取几条路径的参数,然后对信号进行重构,并从接收信号中减去重构的这几条路径信号。这样可以减少连续干扰消除的次数,以此减小累计误差。


3目标检测
实现目标定位的前提是室内有目标存在。为了充分获取室内信息,本文对室内目标进行检测,以判断室内是否存在目标以及目标的状态是静止还是运动。由于不同状态下的反射路径有所不同,多径信道参数会发生变化,因此信道参数可以作为目标检测的原始数据。在每种状态(室内无人、目标静止、目标运动)下分别采集CSI数据,可实现信道参数(AoA、ToF、DFS和衰减)的估计。然后我们以此来构建数据集。
为了保证每个类别特征维度的一致性,我们将多径信道参数中前5条路径中每个参数的均值、标准差和自相关函数作为特征,总共60维,并采用朴素贝叶斯、K最近邻(KNN)、支持向量机(SVM)等多种分类器进行训练。
4目标定位
在室内有人的情况下,我们可以利用信道参数来估计目标的位置。在本节中,我们首先找出目标运动对应的反射路径,依据数学模型进行目标位置估计,然后利用室内地标校准位置,以此提高位置估计的准确性。
4.1路径匹配
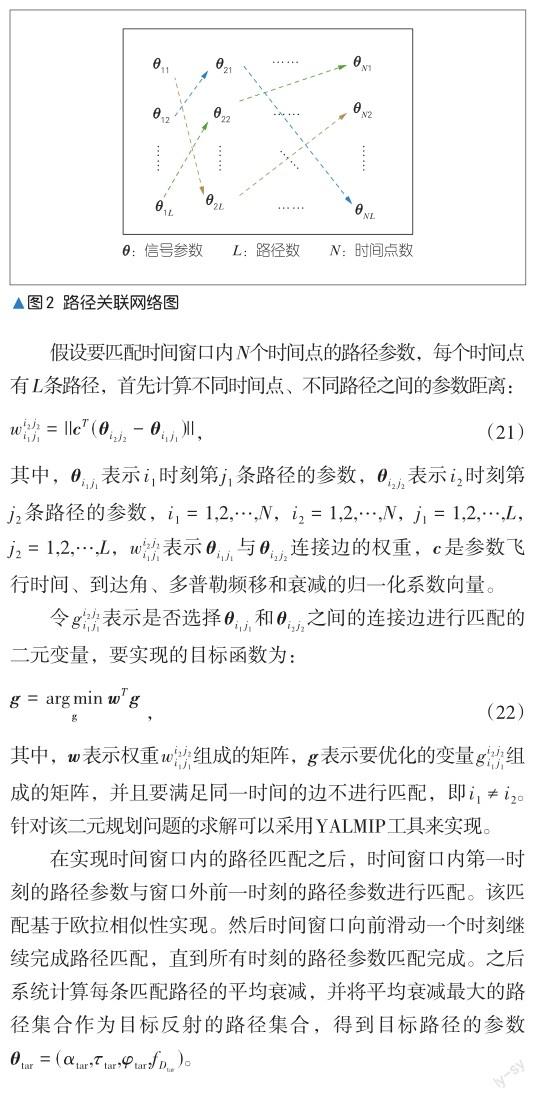
对CSI测量值进行信号参数估计之后,我们就可以得到多个时刻的多径参数。然而,每个时刻的路径参数是独立的,要想实现目标的定位,需要先将所有时刻目标反射路径的参数关联匹配起来。本文采用基于图的目标路径选择算法,构建了一段时间窗口内连续多个时刻的多路径关联网络图,如图2所示。
4.2位置估计
理论上,目标路径的飞行时间乘以光速可以得到目标路径的相对距离。然而,飞行时间的分辨率低,会导致距离的波动较大,因此定位误差也较大。多普勒频移相当于路径范围的变化率,并且分辨率高。因此,我们可以将细粒度的多普勒频移和飞行时间结合起来,以改进距离估计。例如,我们可采用卡尔曼平滑算法[7],根据多普勒频移估计的路径范围变化率来细化ToF估计的范围。
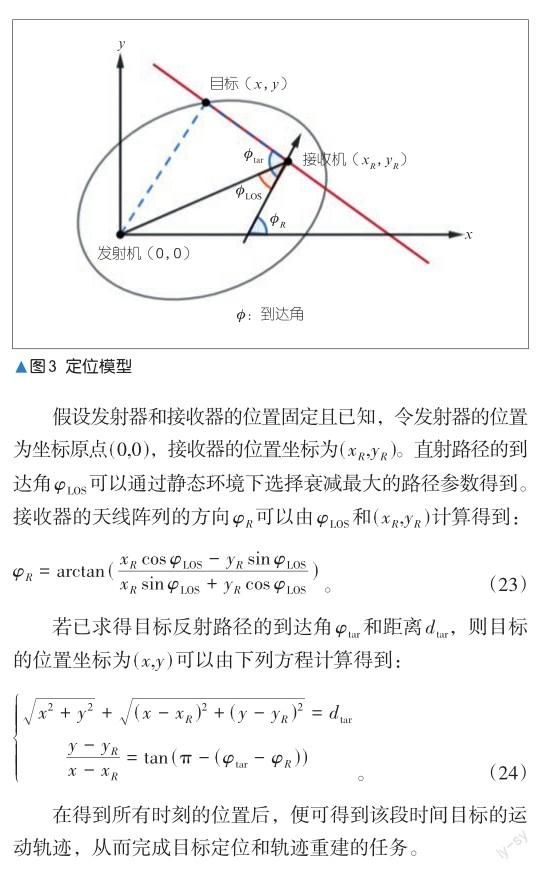
在定位阶段,我们使用目标反射路徑的到达角和距离来确定目标的位置。定位模型如图3所示。
4.3位置校准
在室内环境中总会有一些位置固定的家具,若已知这些家具的位置,就可将其作为室内地标校准目标位置,以提高轨迹重建的准确性。
利用信道參数得到目标轨迹之后,先计算每个位置坐标与地标之间的欧氏距离,再将距离小于阈值的位置坐标用地标的坐标进行替换,以达到位置校准的目的。最后将整条轨迹经过滑动平均进行滤波,可得到平滑的目标轨迹。
5实验结果与分析
我们使用配备有Intel 5300网卡的两台电脑进行实验,并在电脑中安装CSI TOOL以收集5 GHz WiFi信道的CSI信息,在作为发射器的电脑上配置1根发射天线,同时在作为接收器的电脑上配置3根接收天线。每秒钟数据包传输个数为1 000。然后我们使用MATLAB来处理接收数据。
5.1目标检测实验评估
目标检测结果包括3类:无人、目标静止和目标运动。在这3种场景下,我们分别采集CSI数据以估计信道参数,并将估计到的前5条路径的AoA、ToF、DFS和衰减幅度作为原始数据集,使用滑动窗口进行分段,同时设置50%的重叠,之后对数据集进行特征提取和训练,并采用十折交叉验证。表1为不同分类器的识别准确率,图4为KNN分类器的混淆矩阵。
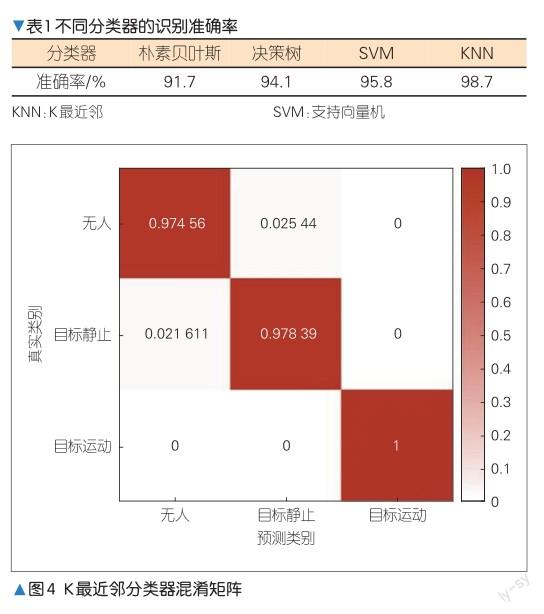
由表1可知,4种分类器的识别准确率均达到90%以上。其中,KNN分类器的识别准确率最高,达到了98.7%。由此可知,信道参数可以用于目标检测并且检测效果较好。由图4可知,无人和目标静止两类情况有混淆的可能。原因是两种状态下室内目标均处于静止状态,并且目标的存在只影响部分反射路径。两种状态下的信道参数有一定的相似性。相对而言,目标运动的情况可以被准确地识别出来。
5.2定位实验评估
我们在真实室内场景中采集数据,并对提出的参数估计和地标校准进行验证和评估。这里我们选择一个5 m×6 m的会议室进行实验,在场景中部署了一对收发设备。设备部署位置如图5所示。

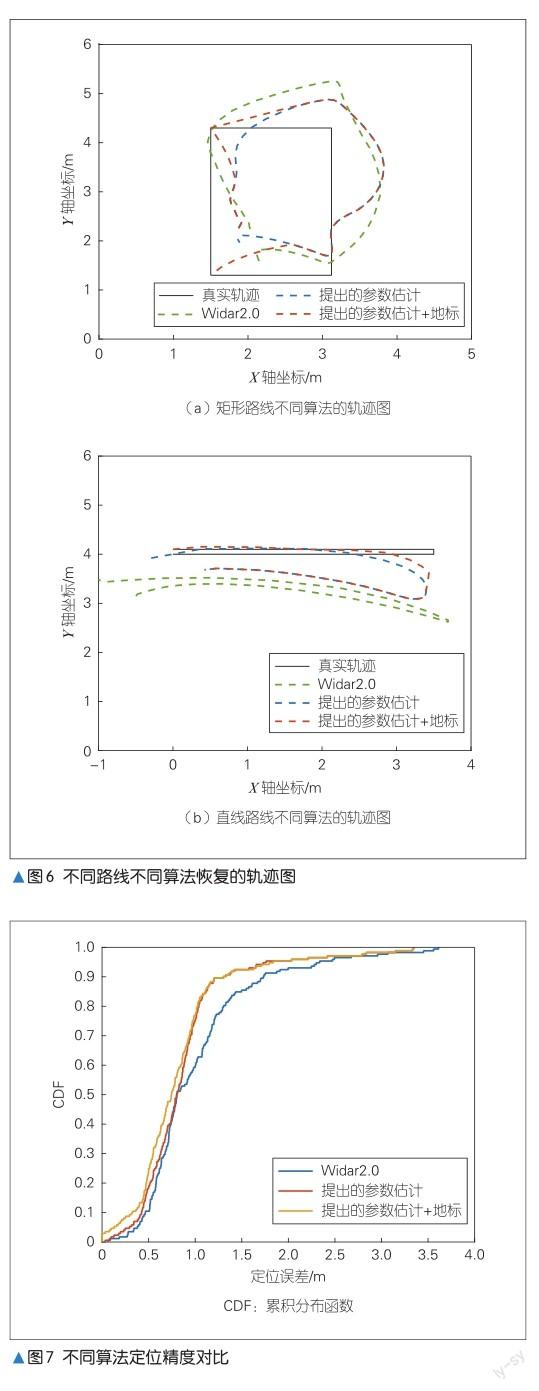
为了证明本文所提方法的性能,我们将该算法与Widar2.0进行比较。图6为在不同路线采用不同算法实现轨迹恢复的结果。图7展示了不同方法的定位性能对比。从图中可以看出,采用本文提出的参数估计方法实现的定位平均误差为0.873 1 m。经过地标校准后,平均误差将降到0.825 2 m。两种方法90%的定位误差都小于1.5 m。而Widar2.0的平均定位误差为1.018 3 m。可以看出,本文提出的算法优于Wi‐dar2.0。Widar2.0的参数估计采用全零初始化,与真实值有较大的误差,并且未考虑噪声影响,导致跟踪时的定位误差较大。综上所述,本文提出的参数估计方法可以提高定位的准确度,并且地标对定位精度的提升也有一定的作用。
6结束语
本文中,我们提出了一种在单链路系统中实现被动目标检测与定位的方法,首先采用连续多路径干扰消除完成参数初始化,然后利用信道参数识别室内有无目标以及目标的状态,在定位阶段结合地标来校准位置,提高了定位的准确性。在典型室内环境中进行的实验表明,该方法的平均定位误差为0.825 2 m,与Widar2.0算法相比,定位精度有所提升。然而本文仅实现了单目标的定位,未来将考虑实现多目标的准确定位。
参考文献
[1] ZAFARI F, GKELIAS A, LEUNG K K. A survey of indoor localization systems and technologies [J]. IEEE communications surveys & tutorials, 2019, 21(3): 2568-2599. DOI: 10.1109/COMST.2019.2911558
[2] XIAO J, ZHOU Z, YI Y, et al. A survey on wireless indoor localization from the device perspective [J]. ACM computing surveys (CSUR), 2016, 49(2): 1-31. DOI:10.1145/2933232
[3] MA Y S, ZHOU G, WANG S Q. WiFi sensing with channel state information[J]. ACM computing surveys, 2020, 52(3): 1-36. DOI: 10.1145/3310194
[4] WU D, ZENG Y W, GAO R Y, et al. WiTraj: robust indoor motion tracking with WiFi signals [J]. IEEE transactions on mobile computing, 2021, 99: 1. DOI: 10.1109/TMC.2021.3133114
[5] PIZARRO A B, BELTRáN J P, COMINELLI M, et al. Accurate ubiquitous localization with off-the-shelf IEEE 802.11ac devices [C]//MobiSys 21: Proceedings of the 19th Annual International Conference on Mobile Systems, Applications, and Services. 2021: 241-254. DOI: 10.1145/ 3458864.3468850
[6] YANG R M, YANG X L, WANG J C, et al. Decimeter level indoor localization using WiFi channel state information [J]. IEEE sensors journal, 2022, 22(6): 4940-4950. DOI: 10.1109/JSEN.2021.3067144
[7] QIAN K, WU C S, ZHANG Y, et al. Widar2.0: passive human tracking with a single Wi-Fi link [C]//Proceedings of the 16th Annual International Conference on Mobile Systems, Applications, and Services. ACM, 2018: 350-361. DOI: 10.1145/3210240.3210314
[8] JIN Y, TIAN Z S, ZHOU M, et al. MuTrack: multiparameter based indoor passive tracking system using commodity WiFi [C]//Proceedings of ICC 2020 - 2020 IEEE International Conference on Communications. IEEE, 2020: 1-6. DOI: 10.1109/ICC40277.2020.9148887
[9] LIU X Y, WANG Y, ZHOU M, et al. Indoor passive localization with channel state information using a single access point [J]. IEEE sensors journal, 2021, 21(15): 17085-17095. DOI: 10.1109/JSEN.2021.3081563
[10] FLEURY B H, TSCHUDIN M, HEDDERGOTT R, et al. Channel parameter estimation in mobile radio environments using the SAGE algorithm [J]. IEEE journal on selected areas in communications, 1999, 17(3): 434-450. DOI: 10.1109/49.753729
[11] XIE Y X, XIONG J, LI M, et al. mD-Track: leveraging multi-dimensionality for passive indoor Wi-Fi tracking [C]//The 25th Annual International Conference on Mobile Computing and Networking. ACM, 2019: 1-16. DOI:10.1145/3300061.3300133
[12] CHEN Z, ZHU G R, WANG S L, et al. M3: multipath assisted Wi-Fi localization with a single access point [J]. IEEE transactions on mobile computing, 2021, 20(2): 588-602. DOI: 10.1109/TMC.2019.2950315
[13] KOTARU M, JOSHI K, BHARADIA D, et al. SpotFi: decimeter level localization using WiFi [C]// Proceedings of the 2015 ACM Conference on Special Interest Group on Data Communication. ACM, 2015: 269-282. DOI: 10.1145/2785956.2787487
作者簡介
韩雨彤,郑州大学在读硕士研究生;主要研究领域为无线通信及智能手机传感器的应用。
李航,深圳市大数据研究院副研究员、高级经理;主要研究领域为无线通信、物联网和机器学习的应用;主持和参与基金项目5项;已发表论文40余篇。
朱光旭,深圳市大数据研究院副研究员;主要从事无线通信理论研究,包括智能通信、5G/B5G通信技术等;先后获国家自然科学基金、广东省面上基金资助,并作为骨干成员参与国家重点研发计划、广东省重点领域项目多项;曾获香港政府奖学金资助,获国际会议(WCSP)最佳论文奖;发表论文50余篇。
陆彦辉,郑州大学产业技术研究院教授;主要研究领域为宽带无线通信理论与技术、大规模网络优化等;先后主持和参加基金项目10余项,获科技成果奖1项;已发表论文50余篇,获得授权发明专利7项、软件著作权3项。
猜你喜欢
软件(2016年4期)2017-01-20
科教导刊·电子版(2016年28期)2017-01-10
教学月刊·中学版(教学参考)(2016年12期)2017-01-03
亚太教育(2016年35期)2016-12-21
计算机教育(2016年9期)2016-12-21
职教论坛(2016年22期)2016-11-19
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
企业导报(2016年8期)2016-05-31
电脑知识与技术(2016年5期)2016-04-14