工程测量仪器使用过程中精度的控制分析
2022-05-30 06:59:16彭涛
大众标准化 2022年9期
彭 涛
(贵州大学,贵州 贵阳 550025)
在工程测量方面应用最为广泛的是GPS技术,GPS控制测量方式具有较大的优势,它不需要耗费过高的运营成本便能测量出较为精准的数据,并且在数据测量的过程中,不需要耗费太多的时间。因此相比较其他的测量手段而言,GPS控制测量方式在现阶段的工程测量中,有较高的使用频率。在工程测量的实际过程中,仪器的使用精度影响着测量的结果和准确性,对于以测量数据为基础的建筑工程而言,有着非常重要的基础性,是为工程提供准确数据的第一步,也是对工程安全性保障的一项重要工程操作。
1 提高工程测量精度的意义及价值
在工程建设的过程中,要依托现代化的测量设备以及各种测绘软件,进行精密的测量测绘,对各种数据进行处理计算,为工程的进一步实施做基础。一般在厘米级的普通的土木工程的测量中,全站仪、经纬仪等仪器的测量完全可以满足普通工程的需要,建立工程所需要的数据库,但是在一些精度要求比较高的工程中,普通的测量仪器难以达到工程所需要的精度指标,不能满足工程中对数据精度的要求,比如安装定位要求在毫米乃至毫米以下的特种工程,普通的全站仪与经纬仪显然达不到相关精度指标,这就需要更高精尖的测量仪器来胜任了。
1.1 工程测量的仪器使用精度影响了工程测量的工作效率
工程测量的精度在数据上为工程实施的准确性和可行性提供了详实的数据,也为工程实施的工作效率提供了必要的准备。在工程测量仪器使用的过程中,借助现代化的测量方式和测量方法,保障了在测绘和计算过程中的数据的可靠性和准确性,尤其是在工程监测的过程中,多周期、多测回的监测数据是否准确,对工程的安全性有着至关重要的影响。
1.2 工程测量的仪器使用精度提升了工程测量的准确性
测量仪器的照准误差以及读数误差会影响数据结果的真实性,因而在工程测量的使用过程中,需要对以上两种误差尽量消除,以此来提升测量的准确度。有时在测量的时候会借助自动化的测绘仪器,减少这种人为误差带来的影响,降低录入数据信息时产生的错误,对数据的可靠性和准确性进行保障。
1.3 工程测量的仪器使用精度方便对工程测量数据结果的处理
在工程测量的仪器使用过程中,需要依靠专业的方法进行理论指导,将各种测量的仪器设备通过系统组合的方式,对所需要测量数据的工程进行角度、边距以及高程方面的测量,当然最重要的是获得所需要的工程的三维坐标以及各种工程数据。例如在国家级别的比较重要的工程中,对于控制网点的控制误差的要求一般会控制在±1.0 mm内,同时对于各种构件的安装的误差要求不大于0.2 mm,在这种高精度要求下,对于测量仪器的使用和测量技术的发展提出了更高的要求。
2 工程中空间坐标测量技术及其精度控制
在大尺寸工程测量中,由于实验环境的局限性以及工程测距比较大,使得测量的空间介于实验室测量和大地测量的范围之间,采用传统的测量方法难以达到测量的精度要求,仪器的使用也超出了其使用的范围。大尺寸工程测量表现为精密的工程测量,测量要素也从角度、长度测量扩展到坐标测量和形状测量。空间坐标测量技术经历了几十年的发展,形成了许多不同的适用范围下的测量方式和测量技术的发展,对于空间坐标测量,主要从高密度电子经纬仪交会测量、数字工业摄影测量、高精度全站仪测量、激光雷达测量、激光跟踪测量、GNSS测量等六种测量技术进行介绍。
2.1 高密度电子经纬仪交会测量系统
全站仪在进行极坐标的测量过程中,其测距精度不足,造成了在大空间的测量中存在测量难度,因而采用高密度经纬仪进行交会测量,以此来弥补不足。测量主要采用两台高密度电子经纬仪以及一台计算机组合而成,根据角度前方的交会测量原理如图1所示,进行联合测量,以此来解算空间点的三维坐标,获得大尺寸测量中的空间坐标系。
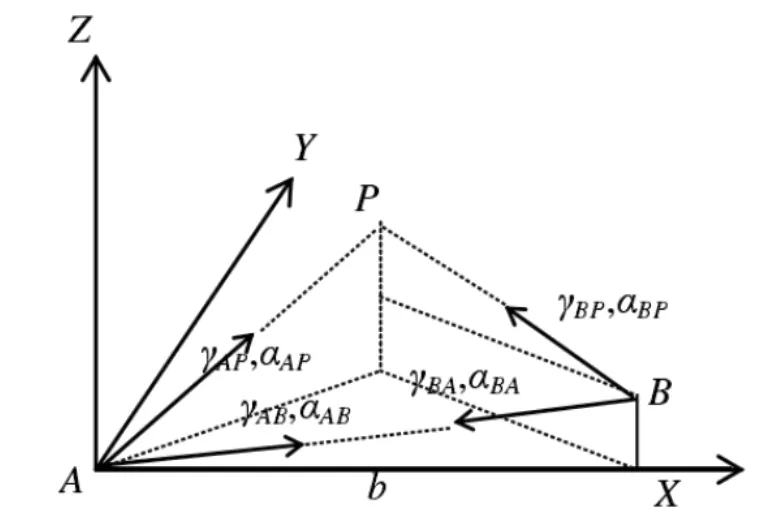
图1 经纬仪交会测量原理
此种经纬仪测绘的测角精度均优于士0.5 ",由于测量仪器以及计算机系统能够形成稳定的测角功能,而且具有自准直,手柄记录等优点,在工程中具有一定的应用,而且其对测量环境要求不苛刻,测量范围比较大,是光学、非接触式的测量系统,多使用的电子经纬仪为徕卡公司生产的T3000A, TMS 100A,TM6100A等型号,需要人工进行测量目标的照准,测量的效率不高,测量的自动化程度相对于其他测量系统而言较低。但是由于高密度电子经纬仪交会测量系统在精密准直测量等领域有着不可替代的作用,因而在一定的范围内仍然使用。
2.2 数字工业摄影测量系统
计算机视觉测量系统也就是数字工业摄影测量系统,使用的设备包含多个摄像机、数码相机等摄像、录像设备,可以对图像资料进行处理,对测量数据通过共线方程进行数据的处理,最终得到三维坐标系统。根据视觉系统摄像设备的数量可以分为单目视觉系统、双目视觉系统以及多目视觉系统。如图2所示为双目视觉系统的原理图。在恶劣条件以及动态条件测量下,具有相对于其他系统而言非常显著的稳定的特点。
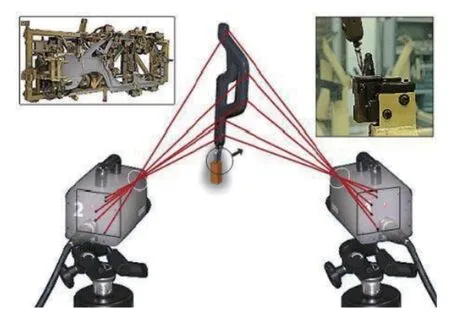
图2 双目视觉系统
此种测量系统的典型测量点位精度达到1∶10万,是测量精度较高的一种测量系统,挪威MetroNor公司的MetroNor系统、德国AICON公司的DPA-Pro系统被数字工业摄影测量系统广泛应用,在国内的许多公司也尝试生产高精度的数字工业摄影测量系统,但是测量点位精度还不能达到国际领先水平。这种测量方式的优点是适合进行批量的点测量和面测量,测量的效率较高,但是对测量环境有一定的要求,不适宜在恶劣的环境下使用,测量的范围也具有一定的局限性。
2.3 高精度全站仪测量系统
高精度全站仪测量系统是一种非接触式的测量系统,需要借助一台全站仪进行极坐标测量而得到目标测量对象的三维坐标。圆形棱镜、反射片以及球面棱镜等元件是高精度全站仪测量系统的重要元件组成,由于其采用Reflectorless合作目标模式,因而精度相比其他测量系统较低,但是由于有遥控设备的配合使用,因而一个人也能完成测量任务。现在典型的工业测量全站仪主要采用的设备型号有Leica研发的TDA5005、TDRA6000以及Sokkia的NET05(测角精度为士0.5",反射片测距精度为0.5 mm+1 x 106xD)等。高精度全站仪测量系统的测量范围限定在几十米到几百米的范围内,由于其测量精度高,因而应用在测量范围较大。
2.4 激光雷达测量系统
激光雷达测量系统测量速度非常快,采用激光雷达扫描的方式,运用极坐标或者球坐标进行定位,采用激光雷达测量技术对目标场地进行工程测量。其测量速度达到十几万个测点每秒,为非接触式的一种测量方式,并不需要测量目标的配合便可以完成测量,如图3所示。

图3 激光雷达测量系统
该系统需要借助计算机对测量的数据进行处理和筛选,以达到对数据进行快速的三维建模,测距精度优于±(10 mm+2.5 μm/m),空间坐标测量精度优于±0.24 mm,空间坐标测量速度最大为1 000点/s,适用于对于数据采集有时间要求的工程测量中,但是这种测量系统的缺点就是很难对单个目标测量物进行测量,当工程中需要进行多测点测量时,需要借助高精度的工具球作为其公共测点以此来保证坐标的准确。
2.5 激光跟踪测量系统
激光跟踪测量系统是一种接触性测量系统,需要借助球棱镜等元件进行配合测量,使用单独一台激光跟踪仪,对目标测量对象进行极坐标的测量,借助位置检测器实现对测量对象的快速追踪,依托位置检测器(Phase-Sensitive Detector, PSD)对目标对象进行追踪,追踪速度快,可以实现测量目标的三维扫描数字化坐标绘制。激光跟踪仪原理结构图如图4所示。
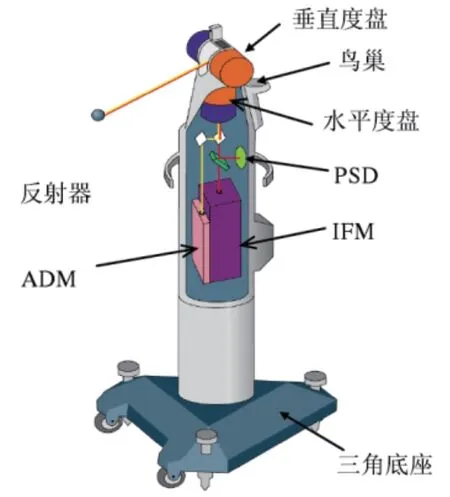
图4 激光跟踪仪原理结构图
该系统具有测量速度快,且测量精度高的特点,当配合安装相机之后可以实现数据的快速扫描拍摄,能够直接成像,还可以拓展配置激光传感器、智能扫描仪、激光测头等元件,提升其使用性能。随着技术的发展,激光跟踪仪当采用了特殊的相位法测距技术之后,比如徕卡推出的AT401激光跟踪仪,通过户外160 m测距的测试,测量的精度可以提高到10μm,使激光跟踪测量系统的使用领域更多更广。
2.6 GNSS测量系统
随着导航技术的发展,在工程测量领域还有一个日趋成熟的技术就是GNSS卫星导航定位系统。GNSS技术需要两个以上的发射器,通过运用角度空间在前方交会的技术才能绘制出空间点的三维坐标,属于小范围的实时的高精度的三维坐标测量技术。
这种测量方式的优点是效率高,可以实现实时的动态测量,测量的精度可以达到亚毫米,采集的频率也很高,达到了20次/s的频率。可以满足多个测量目标同时进行坐标的测量,在几十米的测量范围内,发射器的数量越多,测量的精度越高,越能够满足测量的需求。
3 工程中空间坐标测量技术分析
通过上个部分对不同的工程测量仪器所组成的空间测量系统的介绍,可以看出不同的测量仪器有各自不同的适用范围和适用的要求,而且精度也各有不同。
通过测量技术的对比分析,可以得出,非接触测量时,可以选择高密度电子经纬仪交会测量以及数字工业摄影测量系统,当考虑采用无交会角影响的技术时,可以优先选择激光雷达测量以及高精度全站仪测量系统,当选择测量效率高的测量系统时候,可以优先选用激光跟踪测量以及GNSS测量系统。当各项参数进行比对后发现,激光跟踪测量具有明显的多项优点,激光跟踪仪的角度测量误差是影响点位误差的主要因素,以AT901-B型激光跟踪仪为例,其标称测角精度为,±(15μm+6μm/m),IFM测距误差对点位误差的影响在较短距离范围内可以忽略不计,点位误差主要由测角误差引起。在对于不同的测量系统的选择中,首先应当考虑典型测量范围以及典型点位精度的影响,结合测量地域所具有的场地特点以及空间所提供的具体条件,选择适合的测量系统和测量仪器。
4 结语
在工程测量的过程中,需要对控制网的精度进行严格的控制,而控制网精度的影响因素一般有测量仪器自身的精度、控制网网型的选择、施测人员的技术水平等内容。在不同精度的要求下,测量仪器的选择成为影响测量精度的首要因素,也是对测量的目标工程进行系统数据采集时重要的因素,在实际计算中,要重视对于高精度观测值对于数值影响的重要性权重,这样有利于对数据结果的优化以及对动态化获得测量信息具有深远的影响。
猜你喜欢
宇航计测技术(2022年2期)2022-06-01 09:34:44
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
测控技术(2018年3期)2018-11-25 09:45:50
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
光学精密工程(2016年3期)2016-11-07 09:03:34
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
测绘科学与工程(2016年6期)2016-04-17 06:51:25
电测与仪表(2016年9期)2016-04-12 00:29:52