
受油机飞行边界数值认定仿真研究
2022-05-29 08:01段优赵文碧屈耀红
航空科学技术 2022年4期
段优 赵文碧 屈耀红
摘要:受油包线范围的确定对硬式空中加油的成功对接、安全加油具有重要意义。本文提出了一种不同干扰等级下受油机飞行边界数值认定方法。首先,通过解算KC-135加油机的硬管包线给出受油机的加油可行范围。其次,在分析受油机纵向及横侧向运动模型的基础上,设计受油机多模态双闭环控制系统,使受油机速度、姿态角、位置等状态量能够稳定保持。最后,通过对受油机各模态的数字仿真分析,探析不同干扰等级下的受油机飞行边界范围,并规定受油机飞行安全品质等级。结果表明,受油机在Ⅳ级干扰的环境下不再适合空中加油任务,这对空中加油试飞验证具有很强的指导意义。
关键词:硬式空中加油;受油包线;双闭环控制;飞行边界;飞行品质
中图分类号:V590.35文献标识码:ADOI:10.19452/j.issn1007-5453.2022.04.010
基金项目:国家自然科学基金(61473229);航空科学基金(20181353013);西北工业大学博士论文创新基金
空中加油力量是現代化空军有效扩展空中作战范围和作战能力的重要手段[1-3]。硬式空中加油凭借其加油速度快、受油设备简单[4]等优点占据了更广阔的发展空间。硬式空中加油过程中需要加油机与受油机的超高精度编队飞行,受油机的飞行包线[5]很大程度上影响空中加油安全性和成功概率。受油机飞行边界的确定与加油伸缩杆运动范围[6-7]、周围环境复杂程度等因素有关。目前,业内空中加油在受油机的控制方法上有很深入的研究,但缺少针对受油机在加油过程中一套完整的飞行边界数值认定体系。受油机飞行边界的确定对于硬式空中加油的试飞验证具有很强的指导意义。确定边界包线范围后就能够指导受油机的飞行范围,减少加油过程中的失误动作以及危险性。
硬式加油伸缩杆可视为带舵面的小型飞行器[8],不同型号加油机上的加油伸缩管能够在不同运动包线内做俯仰、偏航运动[6],加油杆的运动包线规定了受油机只能在某区域内运动。此外,受油机因所处风场环境复杂程度不同导致受油包线发生变化。本文以受油机加油包线[5]为出发点,在分析受油机运动模型的基础上,设计了受油机纵向及横侧向通道的多模态控制器[9]。最后,通过数字仿真分析,提出了一种不同干扰划分等级下受油机飞行边界数值认定方法,并给出相应的飞行品质评价[10]表。将受油机环境干扰划分为Ⅰ、Ⅱ、Ⅲ、Ⅳ级,在不同的干扰事项下对受油机高度、侧偏距飞行边界范围、姿态角适应范围等模态进行摸底试探性仿真分析。结果表明,当风场干扰超过Ⅳ级时,受油机飞行品质已经表现较差,不再适合空中加油任务,这对于硬式空中加油试飞包线测试试验具有很强的指导价值。
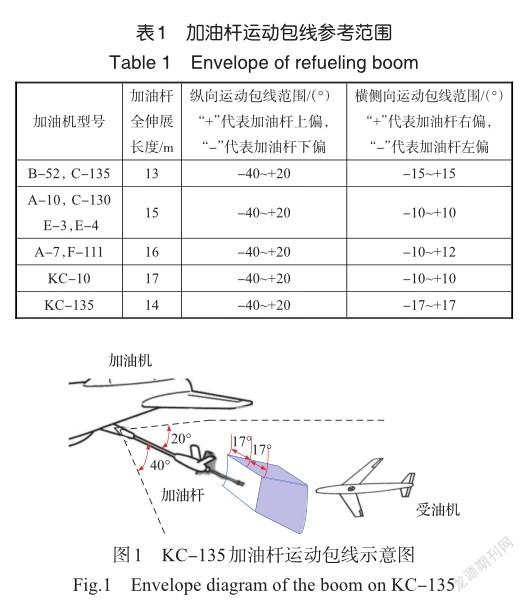
1受油机加油包线
空中加油在会合对接的过渡期时,其中的关键步骤之一是受油机根据加油机发送过来的位姿信息进行加油飞行包线的解算。依据加油杆的力学性能确定受油机能够被加油杆成功对接上的飞行边界范围。由于加油伸缩杆具有机械结构限制和安全范围限制,表1给出了各型号加油杆运动包线参考范围[11]。图1为KC-135型号加油杆[11]运动包线示意图。受油机位于加油机后下方某一飞行包线区域内。图1中加油杆运动方向分为上、下、左、右4个方向,以加油杆轴线为基准,向上运动为上,向下运动为下,面对加油机机尾方向,向左运动为左,向右运动为右。
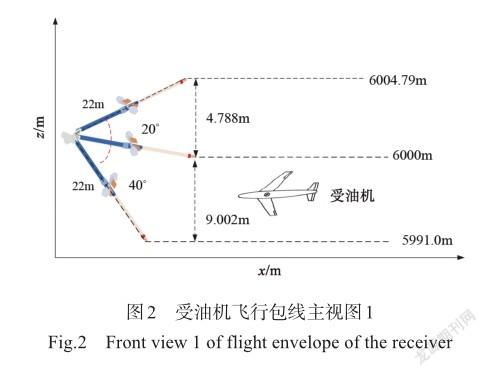
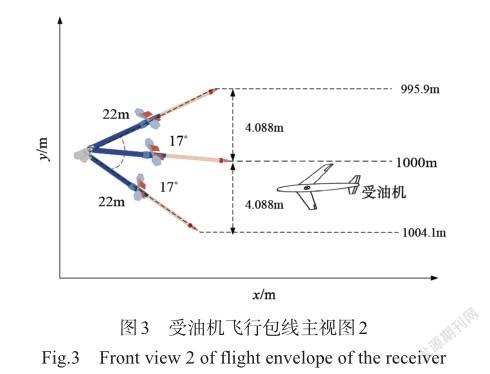
为了确定该飞行包线区域的具体数值边界,需要将整个包线范围作为待分割的状态空间Rn,按照加油伸缩杆运动特点将整个状态空间分为两个正交子平面Ωi,i = 1,2。其中,Ω1为纵向运动子平面,Ω2为横侧向运动子平面。正交分解后的两个子平面上分别进行受油机运动包线范围设定,如图2、图3所示。
从受油机飞行包线主视图中可知,当加油机在6000m左右的高空定直平飞时,加油伸缩杆处于水平展开状态时的高度设定为6000m,考虑到硬式空中加油装置的实际情况,受油机只能在加油机后下方才能完成空中加油。
加油机与加油杆后缘间的夹角为130°,加油杆全伸展状态下为22m。经过三角函数解算后,受油机纵向包线为5991.0~6000.0m;横侧向运动包线为995.9~1004.1m。受油机飞行边界包线的确定对后文设计合理的受油机姿态、位置控制器及制定加油试飞性能评价标准具有很强的指导意义。
2受油机运动学建模
硬式空中加油过程中需要加、受油机超高精度的编队飞行,加油杆的两自由度运动包线决定了受油机纵向及横侧向飞行包线的边界。此外,加油机尾涡场[12]以及突侧风的影响会降低受油机控制精度易导致加油失败甚至对接碰撞等危险事故,因此需要建立受油机纵向通道以及横侧向通道运动模型[13]。
2.1纵向通道线性化模型

3飞行边界内受油机位姿保持控制律
受油机在飞行边界内具有稳定的位姿保持能力对于空中加油的安全性来说至关重要。设计受油机位置、姿态保持控制器时需要建立完善的多模态控制策略[14],将整个控制结构分解成内、外回路分别进行控制律的设计。此外,在硬式空中加油过程中,受油机处于加油机尾涡场干扰、侧风突风干扰环境中。还需考虑诸多干扰因素的存在,设计强抗干扰能力的位置保持控制方案。
3.1控制模态
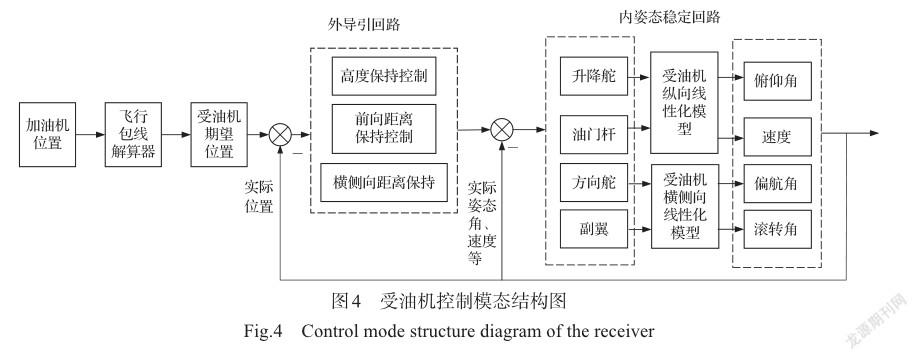
加、受油机队形保持控制的终极目标是使加、受油机的前向、横侧向、纵向三个方向上的距离差保持恒定。受油机控制模态结构图如图4所示。
内环姿态稳定回路通过调整阻尼比改善飞机特性,引入俯仰角速度反馈q对纵向通道俯仰角回路的阻尼特性进行优化,同时通过加入滚转角速度p和偏航角速度r增大横侧向通道控制回路的阻尼。外环导引回路中受油机期望位置是通过GPS获取加油机的位置,再经过飞行包线解算器得出受油机期望位置。根据加、受油机位置偏差进行前向、纵向以及横侧向三轴距离保持控制。
3.2各模态控制律设计
4仿真分析
以某型无人机为研究对象,设定仿真场景为:加油机在6000m的高空定直平飞,加油机初始位置为(1000m, 1000m,6000m),受油机初始位置为(900m,920m,5900m),加油机平均速度为230m/s。首先进行非特殊环境下的受油机队形保持运动控制仿真,受油机的各运动状态响应曲线如图5、图6所示。
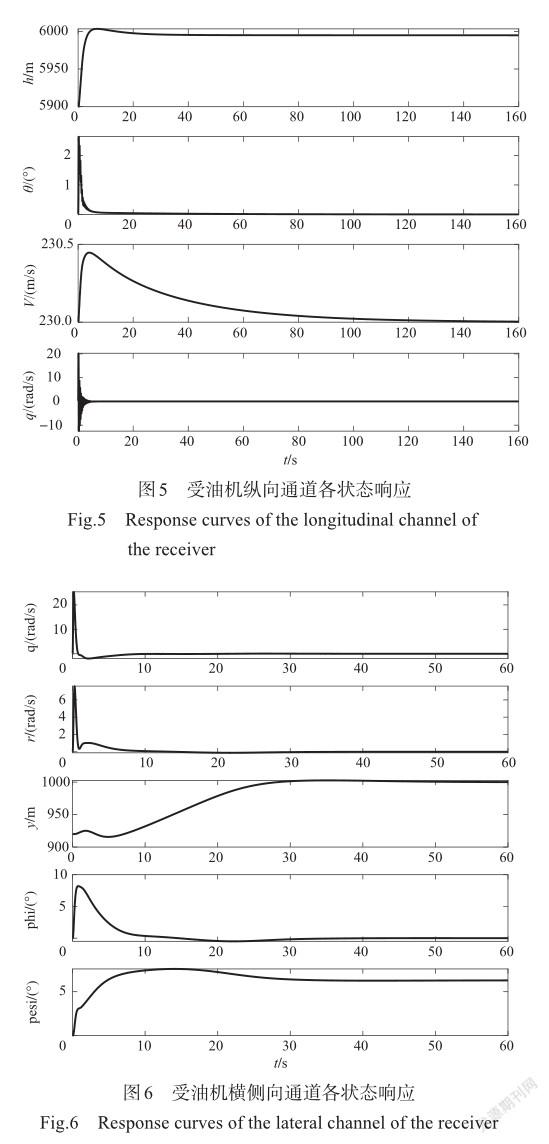
从仿真结果可以看出,纵向通道和横侧向通道在双闭环控制的作用下,可实现受油机速度、姿态角、姿态角速度的稳定保持,受油机能够快速地跟踪上加油机发来的期望高度和侧偏距。在多模态控制作用下,可矫正受油机侧偏,保持飞行航线在预定范围内,各运动状态的动态性能良好,可见该方法适合于空中加油任务。
接下来,进行干扰环境下的受油机运动状态仿真分析,目的是给出受油机在不同干扰等级下的飞行边界。通过分析外军空中加、受油可行性矩阵、空中加油失败因素划分以及空中加油特殊环境下不同风场干扰的影响因子,再结合风场估计及建模方法,对空中加油特殊环境下的风场干扰进行类别划分。按照受油机所处风场环境的复杂程度列出干扰等级表[15-17],见表2。
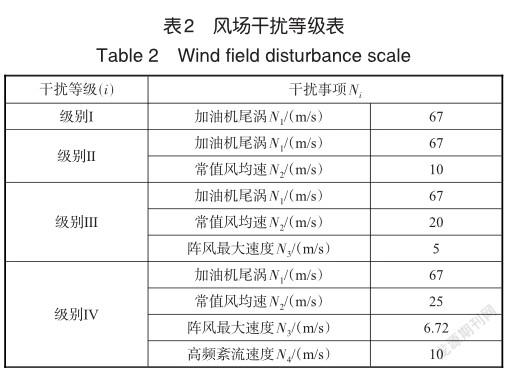
在受油机加油环境的干扰等级表从简单到复杂分了4个干扰等级。当加、受油机从远距靠近时,两机同时受到常值风、阵风、风切变和湍流风的干扰,两机的风矢量值略有不同,主要与两机所在位置处的风场环境有关;而本文仿真过程中针对加、受油机已经进入对接、加油的近距飞行阶段,可认为两者具有相同的常值风、阵风、湍流风信息。在仿真过程中,常值风和阵风均加在受油机横侧向通道和纵向通道中,即为受油机机体坐标系y方向和z方向。
4.1高度边界图
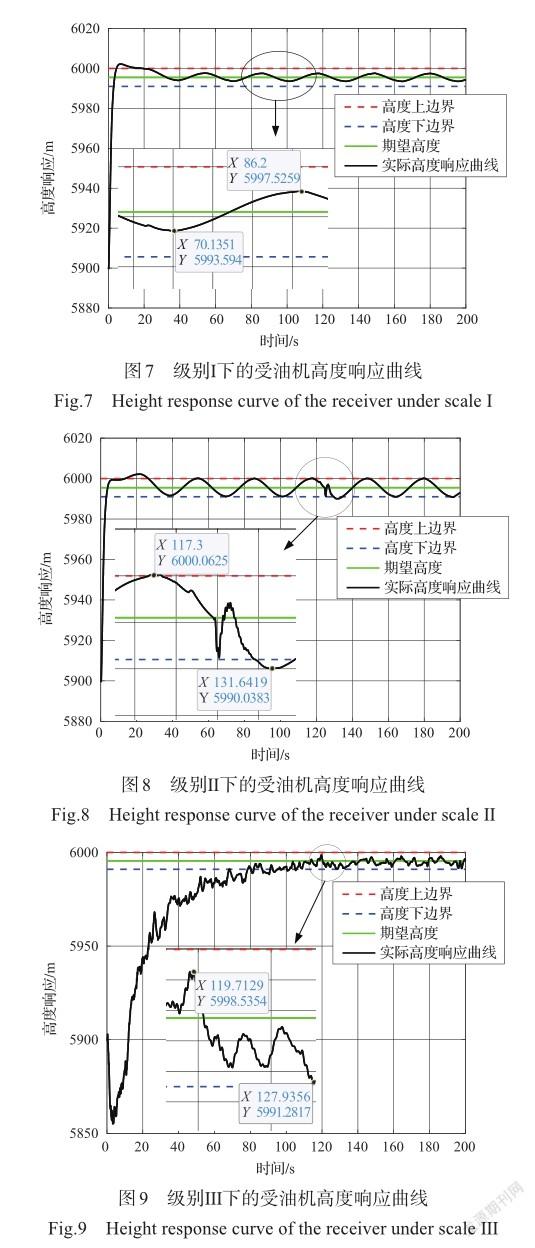
受油机分别在干扰等级Ⅰ、Ⅱ、Ⅲ、Ⅳ级别下的进行仿真试验。高度响应曲线如图7~图10所示。高度上边界6000m,下边界为5990.998m,根据加、受油机高度差提前解算出受油机期望高度为5995.5m。
图7为受油机在级别Ⅰ環境下的高度响应曲线,可见当只存在加油机尾流干扰存在的情况下,受油机能够在高度边界内稳定跟踪加油机。图8为受油机在级别Ⅱ环境下的高度响应曲线,当存在尾流场干扰和常值风干扰时,受油机的高度更接近边界值并有突变现象存在。图9为存在尾流、常值风、阵风干扰下的高度响应。可见受油机高度变化已经出现毛刺,但仍能稳定在高度边界线内;图10为存在尾流、常值风、阵风、湍流干扰下的高度响应,此时受油机高度已经超出飞行边界并伴有严重毛刺,此状态下不适合加油任务的进行。
4.2俯仰角边界图
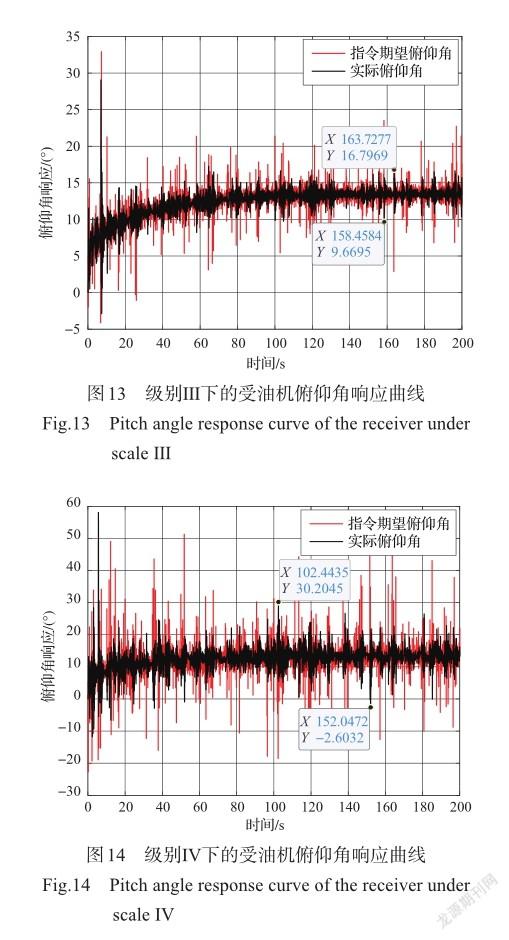
在高度作为外环、俯仰角作为内环控制时,受油机的高度边界实则已经决定了俯仰角边界。受油机分别在干扰级别Ⅰ、Ⅱ、Ⅲ、Ⅳ下的俯仰角响应曲线如图11~图14所示。
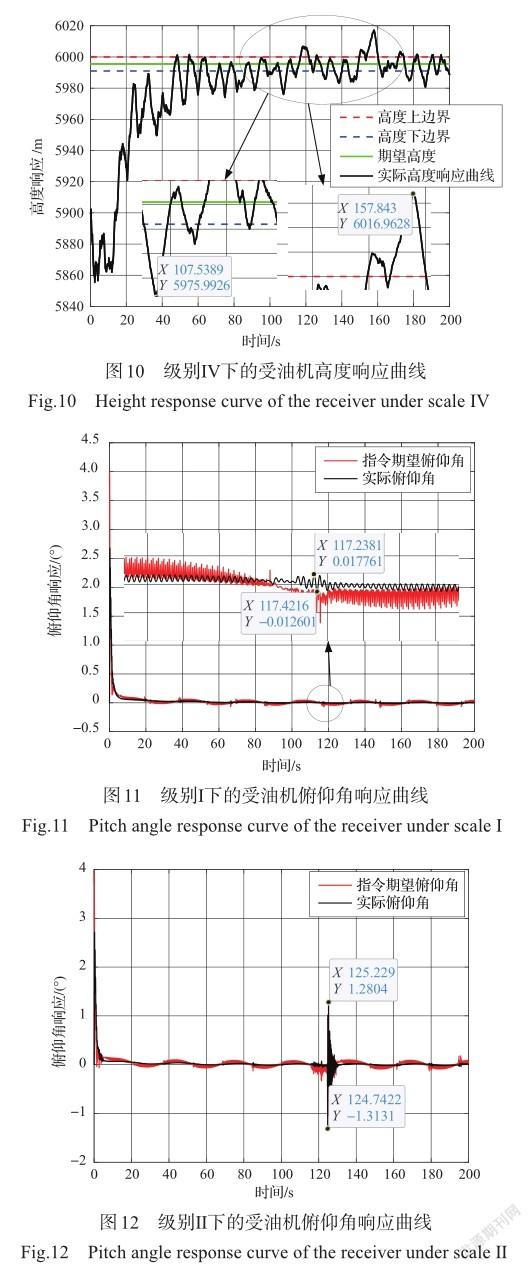
级别Ⅳ下的稳态值域明显比级别Ⅰ下的稳态值域范围大,干扰程度越高,俯仰角变化越剧烈。当出现毛刺时表明已经不适合加油任务,应及时调整姿态平稳后再继续进行加油操作。
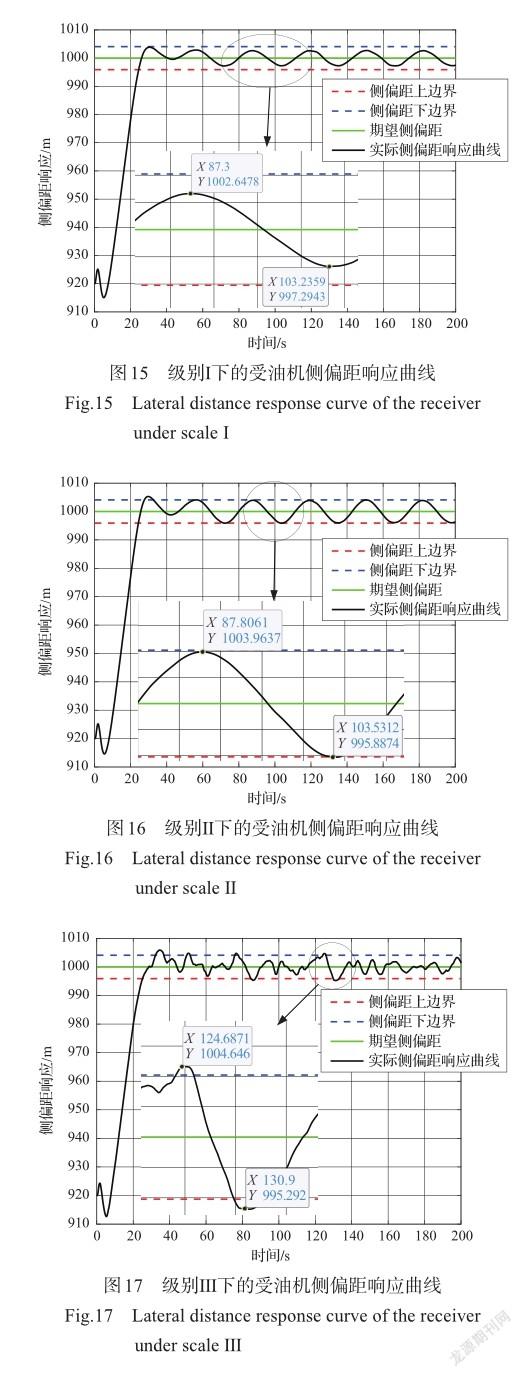
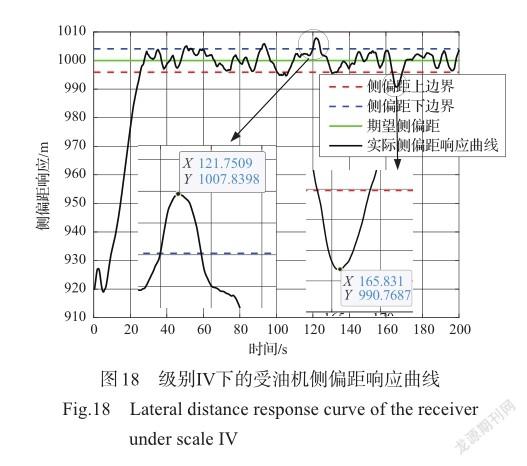
4.3侧偏距边界图
侧偏距上边界1004.1m,下边界为995.9m,仿真过程中规定受油机期望侧偏距坐标值为1000m。
图15~图18为受油机侧偏距在干扰级别Ⅰ、Ⅱ、Ⅲ、Ⅳ下的响应曲线。前三个级别都能保证受油机在包线内的稳定保持,一旦进入级别Ⅳ,侧偏距稳态值会严重超出上边界、下边界,对接操作就会出现失败因素,应及时调整姿态、位置重新进行对准。
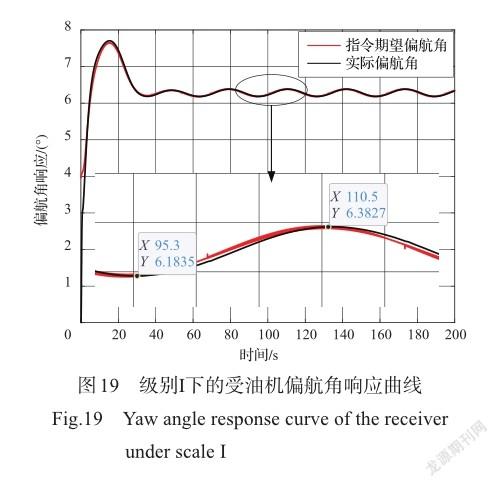
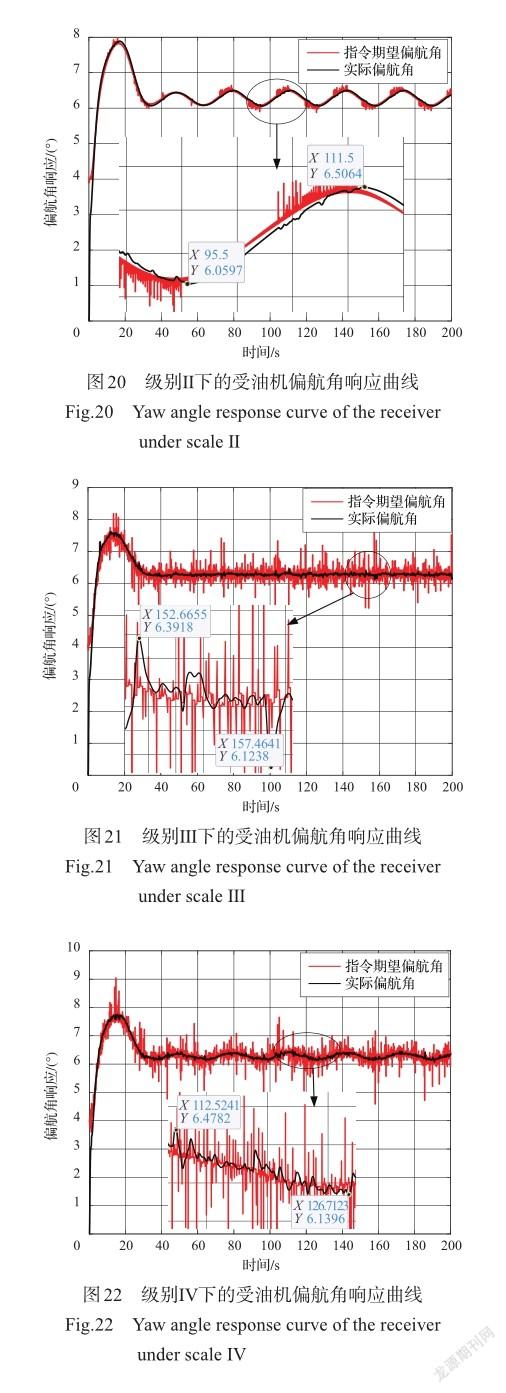
4.4偏航角边界图
受油机在干扰等级Ⅰ、Ⅱ、Ⅲ、Ⅳ下的偏航角响应曲线如图19~图22所示。
由于加油杆是带有万向球头的,可进行俯仰、偏航运动。因此,受油机存在偏航角的情况下,即偏离加油机对称面时,也能进行加油任务操作。
偏航角响应曲线在级别Ⅰ、Ⅱ下的动态特性表现良好,虽然在级别Ⅲ、Ⅳ下的受油机偏航角未出现毛刺等不良响应,但由于侧偏距在级别Ⅳ下已经超出了上、下边界,因此受油机此时应及时调整飞行状态。
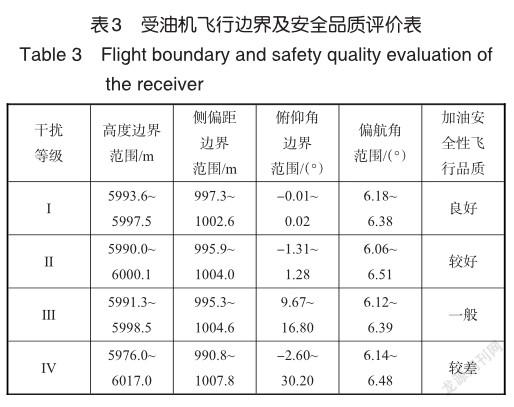
根據受油机各运动状态仿真曲线,给出受油机飞行边界及安全品质评价表(见表3)。
表3中所示为受油机的高度、侧偏距、俯仰角、偏航角分别在干扰级别Ⅰ、Ⅱ、Ⅲ、Ⅳ下的稳态值域范围。可见在等级Ⅰ下的各运动状态响应良好,规定此状态为加油飞行安全品质等级为良好。依此类推,分别给出受油机在等级Ⅱ、Ⅲ、Ⅳ下的飞行边界数值范围。受油机在不同安全品质等级下应该处于对应的飞行边界范围内,否则不能满足加油任务的要求。当受油机处于干扰等级Ⅳ环境下时,飞行边界已经严重超出受油机纵向及横侧向运动包线,同时姿态角状态响应较差,此状态已不适合进行加油任务。
5结束语
硬式空中加油的对接试飞操作具有一定危险性,利用本文提出的受油机飞行边界数值认定方法进行操作指导,可以判断受油机当前自身状态及所处环境是否适合进行空中加油任务。不同型号加油机通过解算加油硬管包线给出受油机运动包线范围,受油机在双闭环控制作用下能够保证纵向及横侧向通道的稳定保持。加入不同等级的干扰,通过仿真分析给出了受油机飞行边界表,当受油机所处环境复杂程度超过本文规定设定最高干扰等级时,受油机已经不能被控制在合理的受油包线内,表明空中加油任务此时应该暂停,在此基础上加入受油机抗干扰控制系统的设计以及搭建整个系统的半物理仿真平台,并在风洞试验中进行验证是本文后续应该投入研究的部分。
参考文献
[1]王海涛.空中加油动力学与控制[M].北京:国防工业出版社, 2016. Wang Haitao. Dynamics and control of aerial refueling[M]. Beijing: National Defense Industry Press,2016.(in Chinese)
[2]钟德星,李永强,李严桵.无人机自主空中加油技术现状及发展趋势[J].航空科学技术,2014,25(5):1-6. Zhong Dexing, Li Yongqiang, Li Yanrui. State-of-art and tendency of autonomous aerial refueling technologies for unmannedaerialvehicles[J].AeronauticalScience& Technology,2014,25(5):1-6. (in Chinese)
[3]袁万勇.伙伴加油飞行试验[J].中国科技信息,2017(11): 38-39. Yuan Wanyong. Partner refueling flight test[J]. China Science and Technology information,2017(11):38-39. (in Chinese)
[4]屈耀红.硬式空中加油系统建模与控制[M].北京:机械工业出版社,2020. Qu Yaohong. Modeling and control of hard air refueling system[M]. Beijing: China Machine Press,2020. (in Chinese)
[5]程龙,姜涛,柴建忠.外军空中加油/受油能力试验验证导论[M].北京:国防工业出版社,2016. Cheng Long, Jiang Tao, Chai Jianzhong. Introduction to air refueling/receiving capability test and verification of foreign forces[M]. Beijing: National Defense Industry Press, 2016. (in Chinese)
[6]Smith J,Kunz D. Simulation of the dynamically coupled KC-135 tanker and refueling boom[C]// AIAA Modeling and Simulation Technologies Conference,2007.
[7]Manfriani L,Righi M. Aerodynamic modelling of a refuelling boom[C]//29th Congress of the International Council of the Aeronautical Sciences,2014.
[8]Smith A,Kunz D. Dynamic coupling of the KC-135 tanker and boom for modeling and simulation[J]. Journal of Aircraft,2007,44(3):1034-1039.
[9]华艺欣,邹泉,田海铭.软式自主空中加油控制策略仿真[J].北京航空航天大学学报,2021,47(2):262-270. Hua Yixin, Zou Quan, Tian Haiming. Control strategy and simulation for probe-and-drogue aerial autonomous refueling[J].JournalofBeijingUniversityof Aeronauticsand Astronautics, 2021,47(2):262-270. (in Chinese)
[10]周自全,張子彦.飞行品质和飞行安全[J].飞行力学, 2009(2): 1-6. Zhou Ziquan, Zhang Ziyan. Flying qualities and flying safety[J]. Flight Dynamics, 2009(2): 1-6. (in Chinese)
[11]Richard L. KC-135 boom operator’s head-up display[J]. Journal ofAircraft,1978,15(1):124-125.
[12]Petrich J,Subbarao K. On-board wind speed estimation for UAVs[C]//Guidance,Navigation,and Control Conference,2011.
[13]陆宇平,杨朝星,刘洋洋.空中加油系统的建模与控制技术综述[J].航空学报, 2014, 35(9):2375-2389. Lu Yuping, Yang Zhaoxing, Liu Yangyang. A survey modeling and control technologies for aerial refueling system[J]. Acta Aeronautica et Astronautica Sinica, 2014,35(9):2375-2389. (in Chinese)
[14]郭军,董新民,徐跃鉴,等.无人机空中加油自主会合控制器设计[J].控制与决策, 2010, 25(4): 567-571. Guo Jun, Dong Xinmin, Xu Yuejian, et al. Design of UAV autonomous controller for rendezvous in aerial refueling[J]. Control and Decision, 2010, 25(4): 567-571. (in Chinese)
[15]谢象春.湍流射流理论与计算[M].北京:科学出版社,1975. Xie Xiangchun. Turbulent jet theory and calculation[M]. Beijing: Science Press, 1975. (in Chinese)
[16]王文龙.大气风场模型研究及应用[D].长沙:国防科学技术大学, 2009. Wang Wenlong. Atmospheric wind field modeling and its application[D]. Changsha: School of National University of Defense Technology, 2009. (in Chinese)
[17]Zhao J,Yan Z,Chen X,et al. The calculation of extreme wind speed based on bayesian method[J]. Journal of Coastal Research,2020,99(1):3-4.
Numerical Identification Simulation Research on Flight Boundary of the Receiver
Duan You,Zhao Wenbi,Qu Yaohong
Northwestern Polytechnical University,Xi’an 710072,China
Abstract: The receiver envelope range is very important for docking and refueling during boom air refueling. It is presented that a numerical identification method for the flight boundary of receiver under different interference levels. Firstly, by calculating the envelope of boom on KC-135, we give the feasible flight range of the receiver. Secondly, on the basis of analyzing the longitudinal and lateral motion models of the receiver, a multi-mode double closed-loop control system of the receiver is designed to keep the speed, attitude angle and position of the receiver stably. Finally, by digital simulation analysis of various modes of the receiver, the range of flight boundary of the receiver under different interference levels is analyzed and the flight safety quality level of the receiver is determined. The results show that the receiver is no longer suitable for the aerial refueling task under the interference level, which has a strong guiding significance for the aerial refueling flight test.
Key Words: boom air refueling; receiver envelope; double closed loop control; flight boundary; flight quality
