
塔机安全监控系统数据处理与存储探讨
2022-05-28 02:08何懿翔李华贵
建筑机械化 2022年5期
何懿翔,李华贵,温 和
(广西建工集团建筑机械制造有限责任公司,广西 南宁 530299)
塔式起重机(以下简称“塔机”)安全监控系统是一种具有塔机运行安全监控数据采集、处理、存储等功能的黑匣子设备,对数据采集的可靠性和存储的稳定性有较高要求。传统的塔机安全监控系统对数据采用直接采集或仅进行简单的平均值滤波或者低通滤波[1]处理,无法真正意义得到准确的数据;对数据采用简单的循环存储[2],无掉电保护存储数据结构,容易造成数据存储混乱及掉电易失。为解决以上问题,本文提出一种基于抖动平滑滤波算法及掉电循环数据存储的新方案,解决传统塔机安全监控系统采集数据不稳定,存储数据混乱与易失等问题。
1 数据及存储构成
塔机安全监控系统通常由采集传感器、数据处理单元、数据存储单元构成,采集传感器一般由起重量限制、起重力矩限制、风速、幅度、高度、回转角度等传感器等组成,是系统的数据来源;数据处理单元负责采集传感器数据并进行数据滤波处理,将数据结果输出给数据存储单元;数据存储单元负责数据存储,系统数据及存储的基本组成见图1。
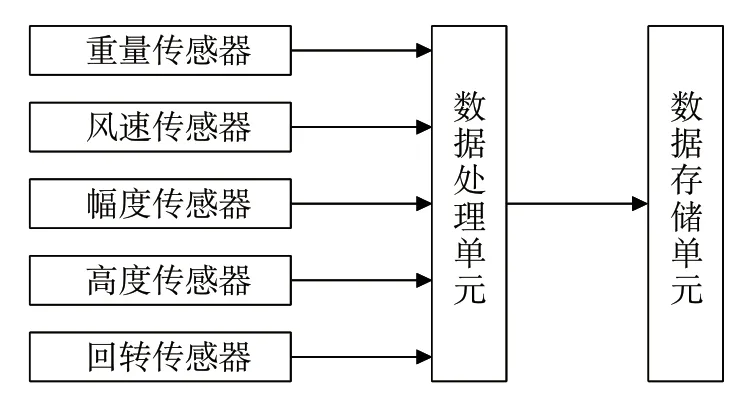
图1 数据及存储构成图
2 数据处理
2.1 设计原理
数据处理单元的采集单元实时采集各个采集传感器动态数据并实时写入缓存队列,当缓存队列数量达到滤波处理数量时,将该数量数据进行出队放入排序缓存冒泡算法排序处理(图2)。采集单元应尽可能提高采样率,在塔机安全监控系统标准要求的采样周期内,获取尽量多的采样数据样本,提高数据的可靠性。排序好的数据重新写入排序缓存中并标记已排序,然后数据流转到数据筛选单元。筛选单元筛选分别去除排序数据中两端偏大偏小的一定数量数据。然后剩余数据进行相邻大小差值逐次比较,差值不符合指定阈值范围内的中间值去掉,阈值限制是为了避免传感器本身的静态噪声干扰波动,其中阈值根据各个传感器实际情况设定。最后将剩下的数据进行平均值平滑处理,避免数据小范围变化,即可得到可靠稳定的数据结果。
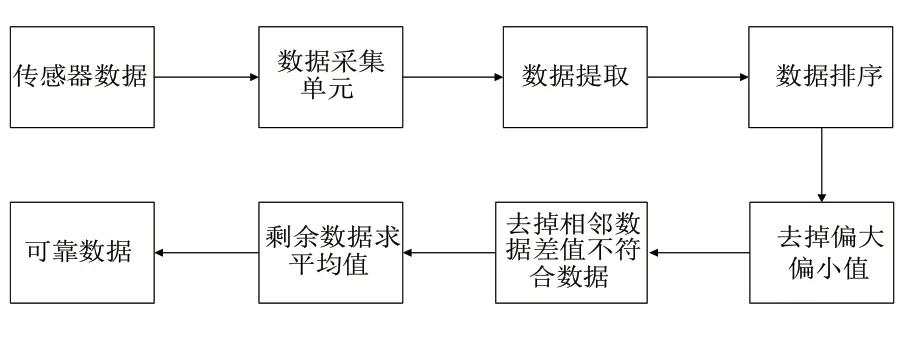
图2 数据处理步序
2.2 重量传感器实验
通过上述数据采集滤波算法应用,针对目前塔机重量传感器普遍出现误差较大问题,现场以1 100kg 砝码重量进行吊装摆动实验,实验结果如由图3 所示,其中原始数据未经任何处理,在吊装过程中,重物摆动导致数据波动频繁,测量值与实际值偏差大,而通过观察滤波后数据可以看出,重量数据较为平稳,能有效克服塔机吊装重量数据波动大问题,且滤波实验重量数值符合实际重量值±5%以内,满足标准使用要求。
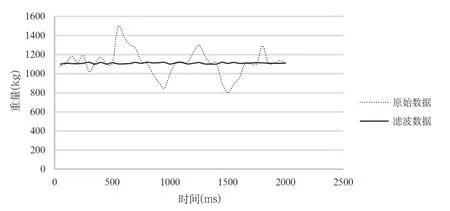
图3 重量数据处理效果
2.3 电压型传感器滤波实验
目前风速、幅度、高度、回转角度等传感器多采用电位器形式,而电位器实际上为一个旋转式的滑动电阻,原理为固定电阻两端供电5V,采集滑动端电压变化值换算出机构运行的行程量,但是电压信号容易受到塔机变频器磁场瞬间干扰,造成电压信号叠加,偏离实际值。实验通过幅度电位器为例,将采集线缆置于运行的塔机变频器旁,模拟磁场干扰现象。实验数据如图4 所示,采样时间为200ms/次,原始数据出现2 次磁场干扰造成电压信号叠加情况,而观察滤波数据发现,算法可以有效过滤电磁干扰造成的波峰值,得到平滑数据,达到预期效果。以此类推,对于电压型风速仪同样具有很好抗磁场过滤,避免磁场干扰造成电压采样值过大引起风速突然变大,错误发出报警提示。
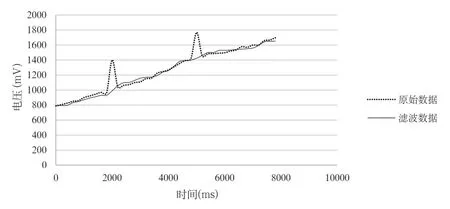
图4 电位器数据处理效果
2.4 实验结论
综上所述,本滤波算法对重量传感器吊装摆动、风速、幅度、高度、回转角度等电压型传感器磁场干扰等过程信号有明显过滤作用,并且数据平滑处理,符合实际值误差范围内,解决传统塔机安全监控系统重量传感器在吊装过程信号波动幅度大,风速、幅度、高度、回转角度等电压型传感器受磁场干扰信号激增,无法有效过滤干扰数据,造成提前误报电子限位报警,引起塔机无法正常作业等采集数据不可靠问题。
3 存储结构
3.1 设计原理
掉电保护循环存储主要由数据存储结构和数据管理结构两部分组成,其中数据存储结构负责数据存储的稳定性,数据管理结果负责掉电保护与循环存储。
1)数据存储结构 包含数据帧头、数据长度、数据内容,数据校验值4 个部分,如表1 所示,其中数据帧头2 个字节大小,为固定值,由用户自定义设置,用于做数据标识头,方便数据遍历查找。
2)数据长度 为2 个字节大小,用于描述数据内容的具体存储多少个字节数据,数据内容长度在0~65 535 范围内。
3)数据内容 为用户存储真实数据,该数据内容可以为各个传感器的实时数据或静态数据等。
4)数据校验值 为2 个字节,采用16 位CRC 校验算法,校验从帧头到数据内容截止,用于核对数据是否被破坏,存储是否完整。
5)数据管理结构 包括数据块起始地址、数据块大小,数据块数量,最新存储地址4 个部分(表1)。其中,起始地址为标识存储起始位置;数据块大小表示数据存储结构分配的大小;数据块数量用于限定存储空间大小,配合数据块大小可以得出结束地址位置,便于判断数据是否写入到末端,及时调整到起始地址循环存储;最新存储地址为每次写入数据都更新一次写地址,用于下次上电寻找最新写入位置,做掉电保护用。

表1 数据存储格式样例
3.2 存储优点
数据存储结构明确写入数据的格式,且加入CRC 校验算法,每次读取都进行数据校验核对,确保每次读取数据可靠性,解决数据存储不稳定问题。数据管理结构规定了整个存储区域的基本信息,明确了数据存储的开始地址、存储空间大小;最新写入地址确保了数据能够自动覆盖,循环存储,且发生掉电时,通过读取最新写入地址找到上一次掉电写入位置,起到掉电保护作用,解决了数据掉电易失问题。
3.3 实验论证
实验通过将本存储结构应用于Flash 存储设备中,每200ms 写入一次重量、风速、幅度、高度、回转角度等传感器实时数据,每5s断电1次,间隔5s 重新上电,分别重复60、90、120 次,模拟系统异常掉电情况,系统是否能起到掉电保护,稳定存储的作用。实验结果如表2 所示,其中丢失数量指重新上电存储位置与上一次断电存储位置的差值除以存储块的大小,数据异常数量值读取的数据不合法的传感器实时数据。通过实验数据可以看出,3 次测试结果的丢失数量和数据异常数量均为0,表明本存储结构设计方案能实现数据掉电保护,稳定存储数据,提升传统安全监控系统黑匣子存储稳定性。

表2 存储实验结果
4 结语
基于上述的数据抖动平滑滤波算法处理及掉电保护循环数据存储结构设计,表明该滤波算法可以有效过滤采样的抖动数据,提取符合实际值的数据,误差范围符合设计要求。掉电保护循环数据存储结构设计可以有效提升数据存储的可靠性,同时解决系统掉电造成数据易失,无法循环存储等问题,有效解决传统塔机安全监控系统的数据采样不可靠和数据存储不稳定的痛点,提升了塔机黑匣子性能。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中学生学习报(2022年15期)2022-04-17
文苑(2020年6期)2020-06-22
电子制作(2018年16期)2018-09-26
电子制作(2017年13期)2017-12-15
电子制作(2017年1期)2017-05-17
火控雷达技术(2016年3期)2016-02-06
创新科技(2014年14期)2014-07-27
筑路机械与施工机械化(2014年2期)2014-03-01
诗潮(2014年7期)2014-02-28
