
并联逆变器改进下垂控制策略分析
2022-05-26 04:01屈守江陈洋洋
电源技术 2022年5期
屈守江,陆 宁,陈洋洋
(武汉理工大学自动化学院,湖北武汉 430070)
随着微电网概念提出,分布式电源以其独特优势,在微电网中应用越来越多,它能够实现可再生能源的就近生产分配,具有能源利用效率高、污染排放低、安装灵活方便以及安全可靠等特点[1]。为了更加高效地利用分布式能源,需要采取合适的控制策略,常用的控制方式有:PQ 控制、恒压恒频控制、下垂控制,其中下垂控制结构简单、可靠性高、无需互联通信线路进行信息交换、可以“即插即用”,应用最为广泛[2-3]。
微电网中,对于分布式电源来说,当线路阻抗呈感性且相互匹配时,传统下垂控制就能够实现并联逆变器功率的合理分配,然而对于微电网和中低压配电网络来说,其线路阻抗多呈阻性,且相互不匹配,逆变器输出电压存在差值,逆变器之间存在环流,导致功率无法均分[4]。针对这一问题,文献[5]引入虚拟阻抗使逆变器等效输出阻抗呈感性,一定程度上减小了功率均分误差,但没有考虑线路阻抗存在差异的问题。文献[6]考虑了线路阻抗的差异,采取虚拟阻抗技术实现了无功功率均分,但必须获取精确的线路阻抗信息,然而线路阻抗的测量方法文中并未给出。文献[7]提出一种线路阻抗辨识方法,结合虚拟阻抗抑制系统环流,实现功率合理分配,但系统可靠性降低,若辨识环节出现故障,系统将无法稳定运行。综上所述,现有的改进下垂控制策略仍存在考虑不全面,或者受限于系统参数获取难度而无法简单实现功率均分的问题。
为此,本文提出了一种基于动态虚拟感抗的改进下垂控制策略,与已有的改进下垂控制策略相比,该策略无需获取线路阻抗信息,另外提出一种新的求取动态电感的方法,在消除线路阻抗差异影响的同时能够很好地应对负载变化。通过将虚拟电感分为固定电感和动态电感两部分,其中固定感抗将线路等效阻抗设计为感性,动态虚拟感抗提高功率分配精确度。在Matlab/Simulink 中搭建了仿真模型,根据实验结果验证了控制策略的有效性。
1 传统下垂控制
为研究逆变器功率传输特性,以两台并联逆变器的简化模型为例[8],如图1 所示。图中:Ui∠θi和I·i为逆变器i的输出电压和输出电流;U∠0°为负载电压;I·L为负载电流;线路阻抗Zi=Ri+jXi。
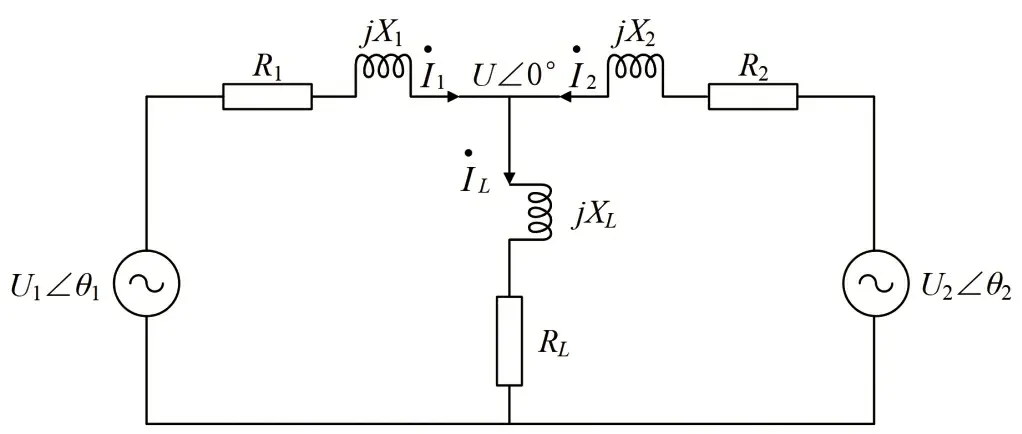
图1 并联逆变器简化结构
输出电压、电流已知,逆变器输出功率如下[9]:
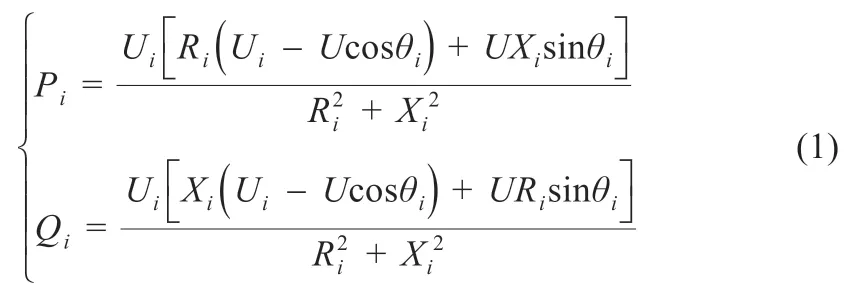
若线路等效阻抗呈感性(Xi>>Ri),则逆变器输出电压和电流之间的相角差θi≈90°,近似等效为sinθi≈θi、cosθi≈1,进而将式(1)简化为:

即逆变器输出有功Pi与相角θi有关,无功Qi和输出电压Ui有关,由于θi不易直接控制,而wi经过积分可以得到相角θi,所以对相角θi的控制通过控制角频率wi实现。联立公式(1)、(2)得到传统下垂控制表达式[10]:

式中:w*和U*分别为逆变器额定角频率和额定电压;wref和Uref分别为下垂控制计算出的参考值;mi和ni分别为有功功率和无功功率的下垂系数;Pi和Qi分别为逆变器实际输出有功功率和无功功率分别为逆变器输出额定有功功率和无功功率。
2 下垂控制的改进
2.1 电压电流双闭环
逆变器下垂控制包括LC 滤波、输出电压和电流的测量、下垂控制计算参考值以及电压电流双闭环控制等环节。其中电压电流双闭环控制流程如图2 所示,电压环为外环,采取比例积分(PI)控制,实现对电压的快速追踪,为电流环提供参考输入信号;电流环为内环,采取比例(P)控制,加快系统的反应速度,提升动态性能。
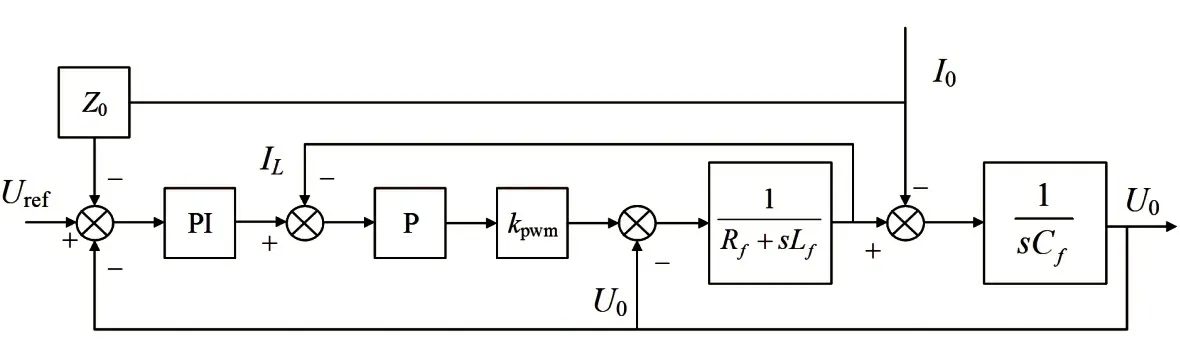
图2 电压电流双闭环控制流程
从图2 可知,参与反馈的是电感电流,是因为工频附近电容电流不稳定,系统性能会受影响。逆变器输出电压及传递函数为[11]:


式中:G(s)为电压增益,反映受控电压对电压指令Uref的跟踪功能;kup、kui为电压环的比例、积分增益,kip为电流环比例增益,kpwm为逆变器增益(取Udc/2)。
等效输出阻抗Z0(s)如式(6)所示,其值与滤波器参数和控制器参数有关。

2.2 固定虚拟电感
对于微电网和中低压配线路等效阻抗呈阻性,传统下垂控制效果下降导致功率分配失衡的问题,可以引入一个定值虚拟电感,优化线路阻感比,使等效线路阻抗呈感性。此时,生成新的电压参考值等效于原参考电压减去输出电流在虚拟感抗上产生的电压,即[12]:

其中Zv为引入的虚拟感抗,带入式(4),可以得到:


其中L0为引入的固定虚拟电感,当L0取1 mH,系统参数采用表1 中的数据时,得到线路等效阻抗的伯德曲线,如图3所示。可知在引入虚拟电感后,等效阻抗在工频处的相位约为90°,此时等效阻抗近似为感性。
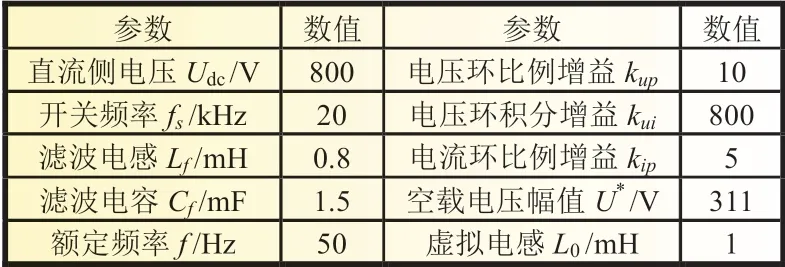
表1 逆变器下垂控制参数
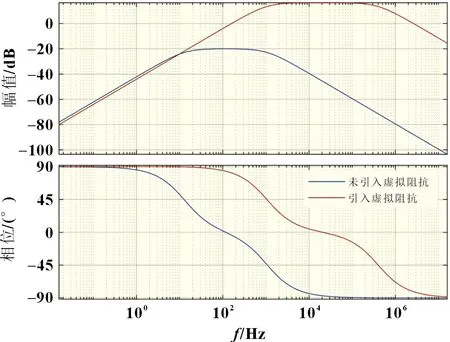
图3 引入虚拟电感前后等效输出阻抗伯德图
2.3 动态虚拟电感
引入固定虚拟电感L0,可以使线路等效阻抗呈感性,此时不考虑线路电阻,令等效阻抗Zi=jXi=jwLv。当并联逆变器输出功率合理分配时应满足以下条件[13]:

且有w1=w2、U1=U2以及θ1=θ2。稳定运行时,角频率是全局信号,逆变器角频率都相等,无论线路阻抗如何,有功功率都能够合理分配;而对于无功功率来说,要实现合理分配,除了上述条件外,还应满足:

只要根据式(11)合理设计引入的虚拟电感,就能够使无功功率均分。对此,本文根据逆变器实际输出功率以及逆变器对应参数,通过求和、积分等环节得到虚拟电感值,与已有的改进下垂控制策略相比,该方法不需馈线阻抗信息,提高功率分配精度时也简化了系统结构,原理如图4 所示。

图4 动态虚拟电感原理图
如图4 所示,首先中央控制器通过收集各逆变器输出无功功率Qi,得到系统所需的总无功功率Qtotal;其次根据每个逆变器容量,将各个逆变器需要输出的无功功率Qratio-i反馈到各个逆变器。

3 仿真分析
在Matlab/Simulink 中搭建系统仿真模型,并联逆变器通过输电线路与交流母线相连,共同为负荷供电。额定电压380 V,额定频率50 Hz;线路阻抗R1+jX1=0.2+j·0.1 Ω,R2+jX2=0.1+j·0.05 Ω,下垂系数m=4×10-6、n=3×10-4;公共负荷Load1为10 kW+8 kVar,Load2为8 kW+5 kVar;仿真时间设置为1.5 s,其中0~0.5 s,仅投入Load1,0.5~1 s 时,投入Load1和Load2,1~1.5 s,仅投入Load1。
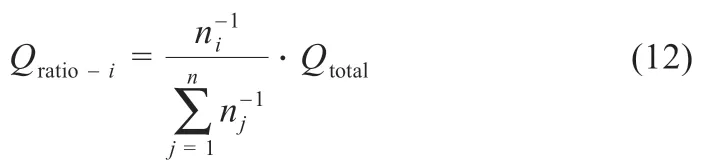
当两台逆变器并联,容量为1∶1。图5 所示为采用传统下垂控制策略时的逆变器输出功率,可知有功功率能够均分,0~0.5 s 以及1~1.5 s 输出有功均为5 kW,0.5~1 s 输出有功均为9 kW,但负荷变化时会经历0.15 s 左右的波动;无功功率分配失衡,在0~0.5 s 以及1~1.5 s 时,输出无功相差约3.7 kW,0.5~1 s 相差约5.4 kW。图6 所示为采用改进下垂控制策略时的逆变器输出功率,可知有功和无功都能实现均分,任意时刻逆变器输出有功、无功均为系统负荷的1/2,且负荷变化时,系统很快达到稳定。图7 所示为逆变器之间环流,可知传统下垂控制最大环流约2.4 A,改进策略下接近零,另外输出电压差保持在0.2 V 左右。
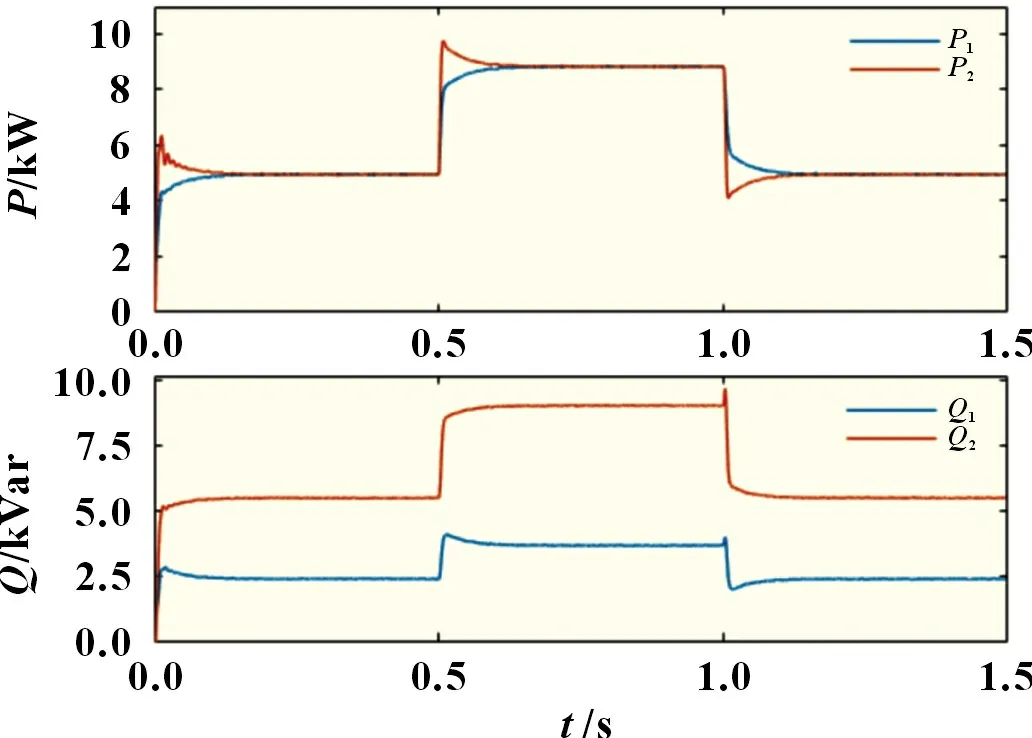
图5 容量相同时传统下垂控制逆变器输出有功、无功
图6 容量相同时改进下垂控制逆变器输出有功、无功
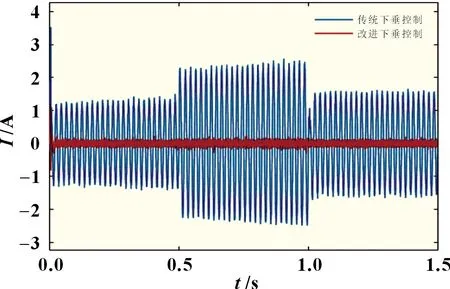
图7 逆变器之间环流
当两台逆变器并联,容量为1∶2。仿真结果如图8、图9所示,可知系统稳定运行时,逆变器输出有功和无功均满足1∶2 的分配要求;虚拟电感L1约为1.32 mH,L2约为0.67 mH,虚拟电感动态变化,消除线路阻抗的影响,提升了功率分配精度。
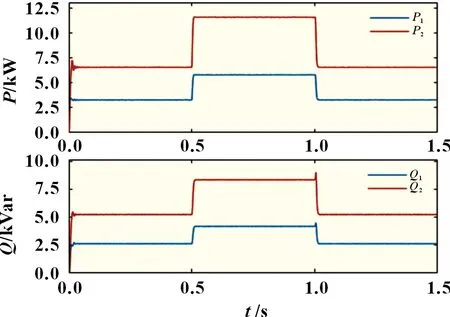
图8 容量不同时改进下垂控制逆变器输出有功、无功

图9 动态虚拟电感
此外,对于多并联逆变器,本文所提的改进策略同样具有很好的控制效果,逆变器输出有功和无功始终满足比例分配要求。仿真结果显示,本文所提控制策略能明显改善线路阻抗不匹配造成的功率分配失衡问题,减小逆变器输出电压差,抑制系统环流,结构简化的同时动态性能也有所提升。
4 结论
本文就并联逆变器功率的平均分配展开讨论,对传统下垂控制的基本原理进行分析,针对线路阻抗不匹配导致的功率分配不均的问题,提出了一种基于动态虚拟电感的改进下垂控制策略,该策略无需检测线路阻抗信息,同时提出新的求取动态电感的方法。将虚拟电感分为固定虚拟电感和动态虚拟电感,固定虚拟电感将线路等效阻抗设计为感性,动态虚拟电感提升功率分配精度。经过多种工况下的仿真分析,与传统下垂控制策略对比后验证了该控制策略的有效性。
猜你喜欢
华声文萃(2022年6期)2022-07-05
电机与控制应用(2022年4期)2022-06-27
文萃报·周五版(2022年16期)2022-04-28
电源学报(2022年1期)2022-02-25
中学生数理化·中考版(2021年10期)2021-11-22
通信电源技术(2021年9期)2021-09-23
马克思主义哲学研究(2021年2期)2021-06-05
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
中学生数理化·高二版(2016年5期)2016-05-14
