一种浮空平台备用链路视频回传方法
2022-05-25 15:46刘耀明
电视技术 2022年4期
宁 锐,刘耀明,常 皓
(1.应急管理部森林消防局,北京 100097;2.北京中兴高达通信技术有限公司,北京 100176)
0 引 言
无人机浮空平台结合宽带自组网的应用,有效地解决了森林灭火救援队与前线指挥部(以下简称前指)之间“联不上、听不清、看不见”的问题,实现了救援现场与前指之间音视频和定位信息等的多媒体通信。基于浮空平台实现的前线与前指通信,依赖于浮空平台机载自组网与浮空平台测控车上车载自组网之间的通信[1]。在实际使用中,无人机浮空平台从前指飞抵前线附近上空,实现对前线的覆盖,同时通过机载自组网与车载自组网实现联通,从而实现前线与前指的互通[2]。由于森林灭火救援作业具有临时性、突发性等特点,救援场地不固定,前指与前线之间的距离不确定,在部分场景下,前指测控车与前线的距离甚至高达80~100 km,已超过机载自组网的覆盖范围,从而导致前线与前指的通信受阻。因此,需要一种备用的手段,实现前线与前指在超远距离场景下的信息回传,保障应急场景下的通信及视频回传。
1 浮空平台分析
浮空通信中继平台以无人直升机为飞行载体,搭载宽带自组网、光电吊舱、超短波中继台以及数据链传输设备,各设备的功能如下。
(1)宽带自组网。机载自组网为自组网通信系统在空中的中继,连接前线单板背负自组网及前指测控车上的车载自组网,工作时,通过无人机搭载机载自组网在前线距地面1 500~2 000 m的高空盘旋,前线各背负自组网之间可以通过无人机进行空中中继通信,也可以与前指进行互联互通,配合单兵侦查终端,可实现前线视频、语音、定位等信息回传到前指测控车[3]。
(2)光电吊舱。机载视频采集摄像头通过无人机搭载到前线高空,可以从高空对前线全局火势进行视频采集,并通过机载数据链传输设备回传到前指测控车。
(3)超短波中继台。超短波语音中继通信,通过无人机搭载到前线高空,提供空对地的语音通信覆盖,为前线各单兵侦查终端提供大范围的空中语音通信中继。
(4)数据链传输设备。实现无人机到测控车的无线通信,传输无人机控制数据及光电吊舱视频到前指测控,并在显控系统进行显示[4]。
浮空平台各系统之间连接接口如表1所示。

表1 浮空平台各系统之间接口表
由浮空平台各系统之间的接口表可知,光电吊舱采集的视频通过数字分量串行接口(Serial Digital Interface,SDI)格式传输给机载数据链终端,由机载数据链终端将视频进行编码后回传给测控车数据链终端,而光电吊舱的控制指令与机载数据链终端的接口为双向RS-422接口。同时,机载数据链终端还有2个备用的RS-422接口及一个备用的SDI视频接口。通常,机载数据链设备的发射功率比自组网设备的发射功率大,其覆盖范围一般比机载自组网覆盖范围大,且机载数据链还承载了无人机的控制指令数据,机载数据链的最大覆盖距离决定了无人机与测控车的最大距离即无人机的作业范围。由此,前线单兵侦查终端采集的视频通过背负自组网及机载自组网传输到无人机后,除可以通过车载自组网传回测控车外,还可以借助机载数据链将视频回传到测控车,实现对宽带自组网链路的备份。当无人机与测控车的距离超出机载自组网覆盖距离时,采用机载数据链作为备用链路,能够将前线采集的视频回传到前指测控车[5]。
2 视频回传备用链路设计
前线采集的视频通过背负自组网传给机载自组网,若要通过数据链将前线采集的视频传给测控车,则需要实现机载自组网与数据链之间的互联。由浮空平台分析可知,机载数据链可提供SDI视频传输以及RS-422数据传输两种方式,同时RS-422接口还承载了无人机飞控的控制指令以及光电吊舱的控制指令,且为高优先级的服务,而留给备用RS-422接口的带宽只有12.8 kb·s-1,此带宽无法承载视频业务,因此,视频回传备用链路只能选择机载数据链的SDI接口。
对比宽带自组网设备接口与机载数据链接口可知,宽带自组网无法与机载数据链直接连接,因此需要设计一个转换模块,将前线传到机载自组网的视频转换成SDI格式,接入到机载数据链,从而实现视频的回传[6]。同时,为了将前线背负自组网的定位信息回传到前指测控车,机载自组网需要支持通过串口的方式输出前线背负自组网的定位信息给机载数据链,从而将位置信息回传到前指测控车。由于机载自组网设备的串口为RS-232接口,因此转换模块还需将RS-232电平转换成RS-422电平,以接入机载数据链。
转换模块与机载自组网及机载数据链的连接关系如图1所示。
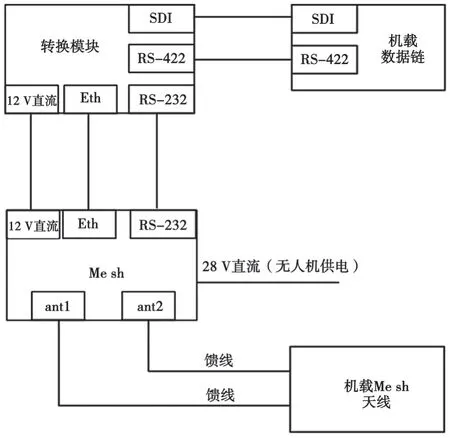
图1 转换模块与机载自组网及机载数据链连接关系
转换模块通过网线与自组网网口相连。机载自组网通过网口将前线采集的视频传给转换模块,转换模块将视频解码成SDI格式后通过SDI接口将视频传给机载数据链,从而实现视频的传输;另一方面,转换模块提供RS-232及RS-422接口,分别连接机载自组网及机载数据链,实现前线单兵背负自组网定位信息回传到前指测控车。同时,机载自组网提供12 V直流电源,为转换模块供电[7]。
3 转换模块设计
由链路设计可知,转换模块需具备回传视频解码功能以及串口转换功能,其整体架构如图2 所示。

图2 转换模块架构图
视频解码模块负责视频的解码,将网络视频格式解码成通用视频流输出给视频转换模块,支持 1 080P、720P、D1等视频分辨率解码,支持4路同时解码,支持4路同时显示及某一路单独显示。
视频转换模块将通用视频流转换成SDI格式输出,匹配光电吊舱视频接口,支持1 080P、720P、D1等分辨率的视频转换。
串口转换模块提供RS-232与RS-422接口转换以及转换模块控制信息传输功能。
控制模块提供对外网络接口,具有解码视频分辨率、解码显示视频路数控制功能。
电源模块接收外部12 V直流电输入,并为转换模块内部的控制模块、视频解码模块、视频转换模块以及串口转换模块供电。
转换模块主处理芯片采用国产高性能视频处理芯片Hi3565C,其内置双核处理器和高性能H.265/H.264视频处理引擎,具备多路高清、超高清视频处理能力,为转换模块提供高性能处理 保障。
针对光电吊舱视频SDI格式,转换模块从视频信号转换到视频信号输出,全线路采用75 Ω阻抗标准,确保信号输出规范,提高信号抗干扰能力,使SDI视频信号输出达到更稳定的状态。
结构方面,转换模块采用全铝合金壳体设计,重量轻、结构强度高、抗电磁干扰性好,对外网口、电源、串口等接口连接机器时采用航插连接器,连接稳定不松脱,完全适用于浮空平台在复杂电磁环境及高强度振动环境下使用。
4 视频回传备用链路验证
视频回传备用链路验证组网如图3所示。前线单兵侦查终端采集的视频通过前线背负自组网传到浮空平台机载自组网,机载自组网通过转换模块将视频转换成SDI格式,传给机载数据链,机载数据链将视频编码后传给车载数据链,车载数据链连接车内显控系统,最终实现单兵侦查终端采集的视频回传到前指测控车。
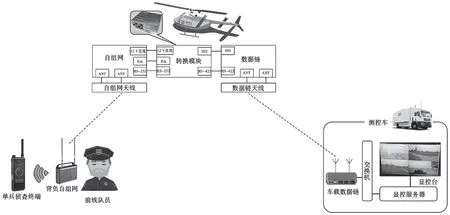
图3 视频回传备用链路网络图
转换模块进行地面模拟测试完成后,进行浮空平台装机测试。项目先后在四川成都、江西景德镇、内蒙古阿荣旗、黑龙江塔河及内蒙古根河等多地进行为期近1年的各种季节气候、各种环境下的测试,通过备用链路可以实现当前线与前指距离达 100 km时,前线视频仍可清晰、流畅地传回前方测控车,并且前线定位信息可在前指显控系统实时显示,满足浮空中继平台超远距离通信需求。
在系统装机联调测试过程中,测试人员发现前方通过备用链路回传的视频在显控系统上显示时存在间歇性闪屏问题。针对此问题,通过分段排查全链路的网络结构、网络吞吐量、视频连接阻抗匹配、视频格式及分辨率/帧率匹配等多方面因素,最终确认为转换模块输出的SDI视频帧率与机载数据链视频输入帧率不匹配导致。转换模块视频输出帧率默认为1 080P 60帧,机载数据链视频输入帧率为1 080P 25帧,导致数据链在对视频处理时出现丢帧现象。现场将转换模块视频输出分辨率配置为 1 080P 25帧,显控系统显示的视频闪屏现象消失,视频显示清晰流畅,在后续各场景下多次测试,均未出现闪屏现象,问题彻底解决。
5 结 语
基于对无人机浮空平台现有装备的分析,通过设计转换模块,实现不同视频格式及RS-232/RS-422接口的转换,从而实现前线采集的视频及定位信息通过机载数据链作为备份链路回传给前指测控车,实现前线距前指100 km超远距离场景下视频及定位信息的回传。经过地面模拟测试及实地测试验证,所设计的转换模块满足备用链路视频回传的要求。因此,结合宽带自组网、转换模块、数据链的备用链路视频回传方法,满足森林灭火救援场景下浮空平台100 km超远距离视频及定位回传的需求。
猜你喜欢
中国石油石化(2022年12期)2022-07-16
疯狂英语·新读写(2021年7期)2021-10-13
军民两用技术与产品(2021年10期)2021-03-16
中国交通信息化(2020年7期)2021-01-14
中国外汇(2019年19期)2019-11-26
北京航空航天大学学报(2019年9期)2019-10-26
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
北京航空航天大学学报(2017年3期)2017-11-23
Coco薇(2017年8期)2017-08-03