
基于无人机测绘技术的露天矿区边坡变形识别方法
2022-05-23 06:25:38覃应哲
地理信息世界 2022年1期
王 涛,王 伟,覃应哲
黑龙江省第六地质勘查院,黑龙江 佳木斯 154000
0 引 言
露天矿区开采导致临时性边坡和半永久性边坡。临时性边坡开采时间较短[1-3],允许出现小范围滑坡事故;半永久边坡使用时间较长,对安全性需求也较高,一旦发生坍塌或滑坡情况,将会发生严重事故,造成重大人员伤亡和经济损失[4-8]。因此,露天矿区边坡不稳定产生的安全隐患问题亟待解决。
针对边坡变形监测识别研究一直是众多研究者的重点。文献[9]提出使用高精度机器人作为测量工具的边坡变形观测方法,能够准确确定边坡的水平与垂直位移,但是这种测量机器人成本较高,短期内不适合推广使用。文献[10]提出使用三维电子罗盘作为测量手段的边坡变形监测方法,经常受到露天矿区地形的限制,导致测量数据准确性较低。
现有边坡变形监测识别研究方法各有利弊。露天矿区多处于高山、峡谷等地形比较复杂的地区,全站仪、罗盘等传统边坡测量手段精度虽高但是测量难度较大,不适合矿区边坡测量,不能充分获取露天矿区信息。远景测量方法尽管能够节省人力,准确获得大量观测点的中间位置,但是对于地形比较复杂的露天矿区,存在拍摄照片难度较大的困扰,而且远距离拍摄难以获得清晰的图片。比较先进的激光扫描技术通过扫描露天矿区实现三维重建,能够快速获取露天矿区的三维数据,但是数据获取的过程过于复杂,且设备价格昂贵,对监测点要求较高,实际推广使用难度较大。
近年来,信息技术、无人机遥感测绘技术被广泛应用于城市规划、三维建模、应急救灾等领域,取得可观的研究成果。无人机测绘技术是一种新兴的空间数据采集技术,在无人机上搭载数码相机实现多角度测量,将摄影测量、无人机以及计算机技术等相互融合,突破传统数据采集的各种限制,准确率高、速度快、成本低。本文使用无人机测绘技术识别露天矿区边坡变形情况,跳出地形环境等对数据采集的限制,提高了识别与获取露天矿区边坡变形数据的准确性。
1 露天矿区边坡变形识别方法
1.1 无人机测绘数据采集
本文应用无人机测绘技术进行数据采集(图1)。矿区边坡数据采集前要充分做好准备工作,详细分析待采集区域的资料内容,开展实地调研,明确需要识别的范围、精度要求、成果要求等,及时了解是否存在飞行禁区。综合目前已知数据采集情况,参考1:500地形图,设分辨率高于5.5 cm,确保数据结果具有较高精度和绝对坐标,获得高精度的数字图像[11]。
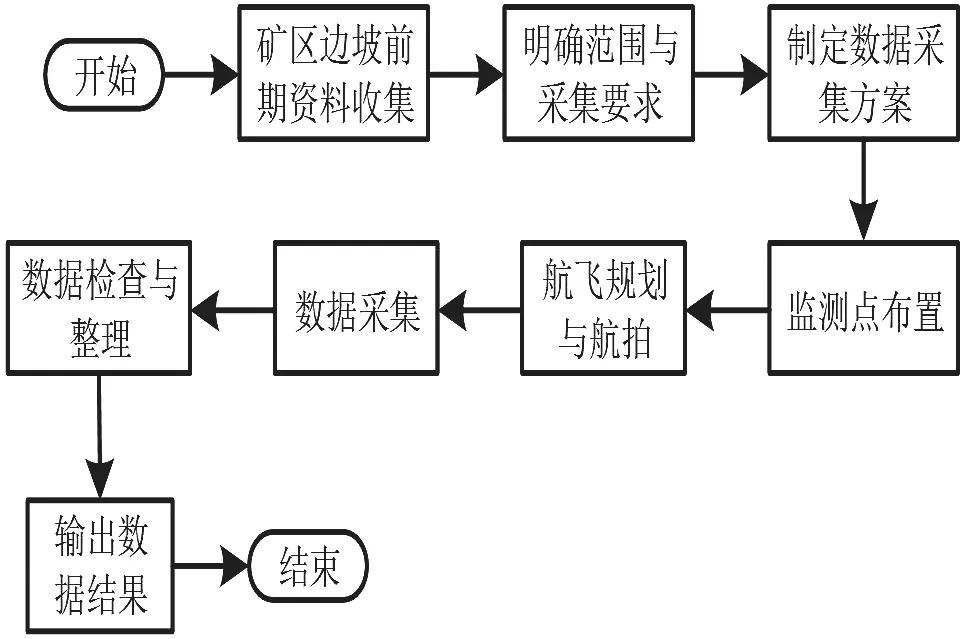
图1 无人机测绘数据采集技术流程图Fig.1 Flow chart of UAV mapping data acquisition technology
明确采集需求后,制定无人机航飞方案。无人机测绘时,采用倾斜与垂直摄影相结合的数据采集方法,设焦距为8.9 mm,像元为2.512μm,单架无人机飞行时间限定为30 min,倾斜拍摄时角度为45°,地面分辨率为0.05 m,无人机飞行航高计算公式如下:

式中,h、f分别为相对航高与相机焦距;GSD、a分别为影像地面分辨率与像元大小。综合考虑地形、航向精度和旁向,将航向和旁向分别设定为80%和75%。
无人机航飞方案制定后,应在待识别的斜坡区布置监测桩,布桩时应充分考虑无人机的飞行高度和识别效果。在图层稳定区域设置直径为45 cm的圆柱桩或边长为45 cm×45 cm的方形桩,底盘浇筑达到地面高度,使用红色油漆涂抹并做标记。监测桩安装完成后,保持稳定3~4天再开展无人机测绘[12]。
数据采集包含低空倾斜摄影与外业像控点测量两个方面。露天矿区内的特征点不明显,因此,需要无人机根据监测桩进行摄影测量,获得待识别区域的原始图像数据;针对监测桩测量得到的控制点信息主要用于后续边坡位移计算;监测桩测量得到控制点后,需要根据矿区的坡度和地形特点进行倾斜摄影,以获取边坡的数据信息。
1.2 无人机测绘图像配准
在数据采集过程中,受到光照、拍摄技术等因素影响,采集的图像存在重叠、扭曲、模糊等问题,因此需要对无人机测绘采集的图像进行配准处理。
1)特征点匹配。使用尺度不变特征变换算法从无人机测绘原始图像中依次提取边缘特征点,以欧式距离作为标准进行特征点相似度量,通过穷举匹配方法在无人机测绘原始图像内搜索待配准的特征点。
假设R1={r1,r2,...rn}和S1={s1,s2,...sn}分别为原始图像内边缘特征点集合与目标图像边缘特征点集合,每任意两个特征点相似性度量的计算公式如下:
式中,dmin、dscn分别为最近距离和次近距离;δ为给定的阈值。从无人机测绘原始图像中提取某个关键点,找出关键点和目标图像存在最近欧式距离的前两个关键点。假如最近距离除以次近距离得到比例阈值,如果这两个关键点的给定阈值结果低于比例阈值,那么可接受该对匹配点。给定阈值δ越小,匹配点数目越小,也就说明结果更加稳定[13]。
为使特征点匹配准确率更高,设计了目标函数。通过反复提取最小点集,得到目标函数参数的初始值,通过这些初始值,将所有数据分为外部点和内部点,并通过所有内部点重新求解目标函数参数,运用随机采样一致性原则提取出误匹配点。
2)特征点校正。如果无人机测绘采集的图像存在较大变形,在特征点匹配后,需要使用小面元微分校正法进行图像偏移校正。具体方法是使用上文匹配获得特征点,通过Delaunay构建三角网,使用三角网把图像划分成数个很小的面元,划分面元时要考虑到图像一次形变,以下为具体实现步骤:
匹配处理完成后,图像内的一个三角形用△abc表示,图像校正以后的三角形用△ABC表示,这两个三角形互相对应的坐标为:(xa,ya)、(xb,yb)、(xc,yc),(xA,yA)、(xB,yB)、(xC,yC),把这些坐标代入下式解算△x、△y和θ的匹配参数如下:

式中,△x为x方向的平移量;△y为y方向的平移量;θ为两坐标系旋转角度。通过解算获得△x、△y和θ的匹配参数(X,Y),使用图像差值算法,调整匹配参数,获得图像偏移的校正结果。
为进一步解决图像中存在的倾斜问题,使用空三解算方法保证图像中位置相对准确。图像偏移校正后,还需增加超过3个像控点,确保在次平差范围内,空三解算后的成果坐标系与工程应用所需坐标系保持一致。进行像控点刺点时,各像控点最少保证3张图片再开始刺点,依据上一空三结果预计出各刺点的误差,此时误差通常较大[14]。全部像控点刺点完成后,基于一次像控点的空三解算结果,完成刺点自动提取和光束网平差分析,根据平差结果,确定图像倾斜校正。
1.3 边坡变形识别
1)计算监测桩位移。以上方法两两匹配,使用无人机测绘技术获得原始图像,进而获得与监测点处于相同位置的监测桩图像特征点,通过监测点空间坐标和相机参数,计算获得特征点的空间坐标。将计算获得的各特征点设定为基准点,依序计算得出各个监测桩的空间坐标。使用目前已有特征点,将各个监测桩轮廓识别出来,根据特征点空间坐标计算获得各监测桩中心点空间坐标[15]。
通过无人机多次测绘获得各监测桩的空间坐标,各监测桩位移变化量计算公式如下:

式中,dki为第k个监测桩第i次的位移变化量;(xk1,yk1,zk1)与(xki,yki,zki)分别为第k个监测桩第1次获取的空间坐标和第k个监测桩第i次获取的空间坐标。
2)生成位移云图。经过计算,依据各监测桩的位移变化量,引入基函数差值算法,获得监测桩周围边坡位移变化量,经VTK可视化生成与监测桩位置相对应的位移云图(图2)。

图2 位移云图效果Fig.2 Displacement nephogram effect
3)边坡三维重构。使用差值算法和空三解算方法解决图像偏移和倾斜问题后,进行边坡三维模型重构。经高精度图像匹配获得较高密集度的三维点云,点云图像是无颜色信息的黑白图像,通过这些点云构成TIN网,得到白模图像。
依据空三解算后得到的各图像外方位元素,计算得出TIN网内每个三角点与三角面在图像中的具体位置,依次在图像内找寻总质量最佳、效果最合适的纹理,开展后续着色工作,最终输出具有纹理特征的边坡实景三维模型。三维模型存在数据量比较大的问题,实际分析时,需将模型分块,同时构建层次细节模型,参照计算机内存设定分块大小,最终获得被识别区域的模型效果。
4)边坡变形分析。通过分析边坡稳定性,识别出边坡的变形状态。以各边坡稳定性系数和位移系数定量评价边坡稳定性,边坡位移稳定系数计算公式如下:

式中,qd2、rd、Sd分别为均方根差、位移稳定系数与位移测量值标准差。假如某个时间段中,边坡变形状态非常稳定,未出现明显变化,此时rd趋近于1。rd与边坡稳定性成正比例关系,rd值越大,边坡越不稳定。边坡位移计算结果波动较大的情况下,qd2值也随之增大,导致的rd值也出现升高甚至趋近于1。依据位移波动结果,可知边坡的位移变形状态,但仅通过位移稳定系数分析边坡的变形状态时,误差较大,还需要结合位移变异系数td识别边坡变形情况,计算公式如下:

式中,Ed为位移测量值的数学期望,一般情况下取值不能为0;td为测量位移时各个测量值之间的相对离差。通过综合分析位移变异系数与稳定化系数,可以准确识别出边坡的变形状态。
2 实验结果
本文将佳木斯某个石灰石采矿区域作为研究对象,该地处于我国东北边陲,冬季漫长,气候寒冷,全年平均气温在零上3℃,仅有146天为无霜期。该地矿产资源丰富,包含4座石灰石矿体,总蕴藏量约为18~25万m3,矿产总量约为47.5×104t,大多矿体裸露出地表适合开采。本文研究的石灰石矿区主要出产冶金用石灰,开采面积约为965 km2,储量17×104t,初步探明可采储存量约为 528×104t。
为对比无人机测绘结果的准确性,本文同时使用高准确率机器人、三维电子罗盘作为测量工具,对研究区域边坡变形情况进行识别。这两个方法分别来自参考文献[9]和参考文献[10],对比3种方法在图像配准方面情况(图3)。
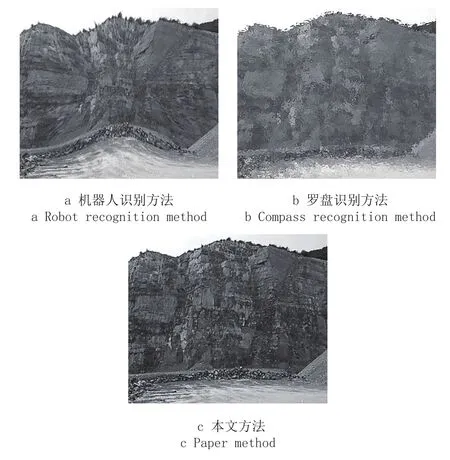
图3 图像配准结果对比Fig.3 Comparison of image registration results
从图3能够看出,机器人识别方法在图像采集方面具有较高的准确性,但是在图像配准时存在图像扭曲现象,说明配准结果不够准确;罗盘识别方法图像采集结果不够准确,图像配准时的特征点提取结果不够精准,导致处理后的图像存在模糊的情况;本文方法采集的图像足够清晰,且配准后效果良好,为后续实验打下良好基础。
本文开展实验时,在研究区域设定15个监测点,使用3种方法识别边坡变形情况(表1)。
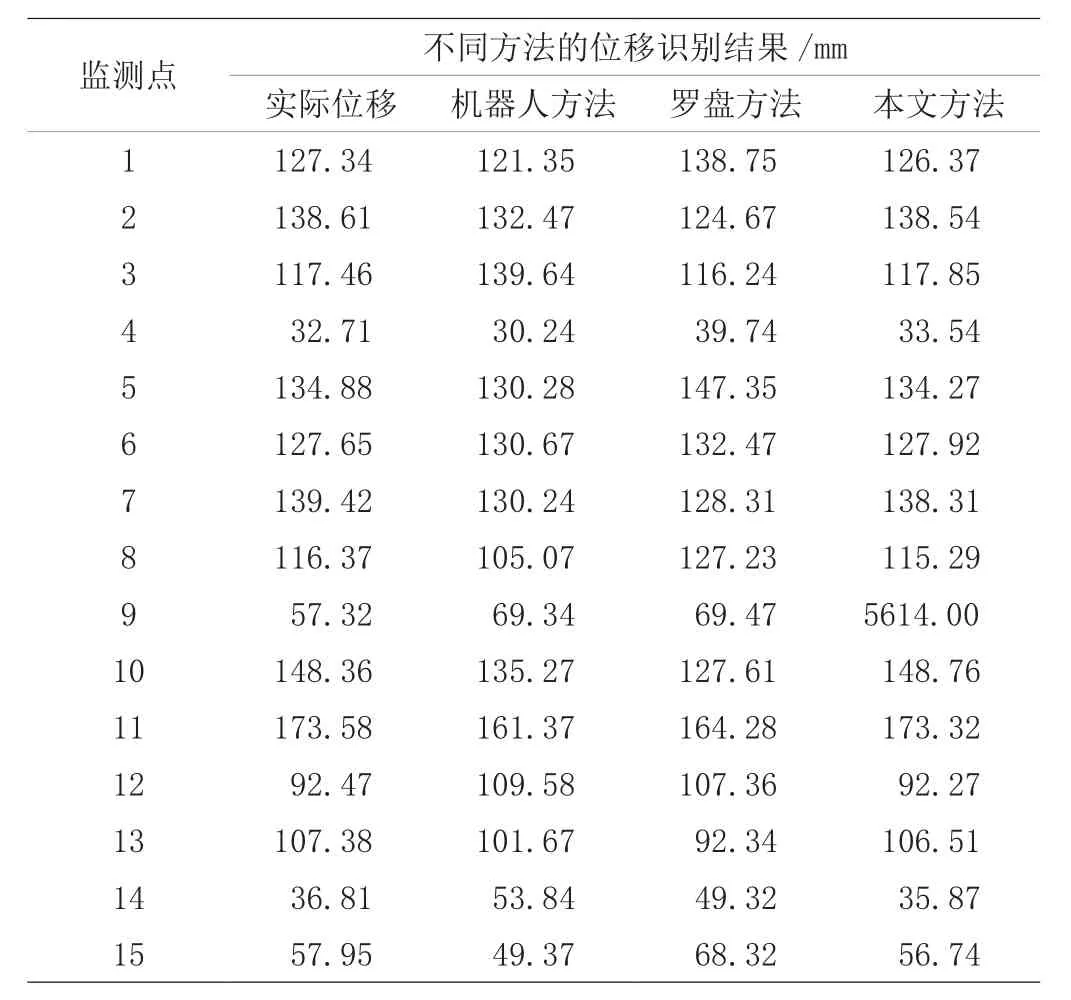
表1 边坡变形识别结果Tab.1 Identification result of slope deformation
分析表1可知,罗盘识别方法的位移识别结果与实际的位移差别较大,说明受到数据采集过程及图像配准结果的影响,识别效果较差;机器人识别方法的位移识别结果较为接近实际位移,但是有较大的提升空间;本文方法的位移识别结果与实际位移最为接近,说明使用无人机测绘技术,可以提升数据采集准确率,具有较高的识别效果。
识别边坡变形情况时,各方法都在图像配准后开展边坡三维重构。在重构过程中,模型中的颜色权重和纹理权重均为可调整的,颜色、纹理权重变化会影响边坡变形程度的识别准确率。统计本文方法在不同纹理和颜色权重下的识别准确率(表2)可知,单一颜色权重或单一纹理权重下,边坡变形程度的识别准确率都较低,尤其是单一纹理权重时,识别准确率最低;当颜色与纹理权重各占一半时,识别准确率最高。
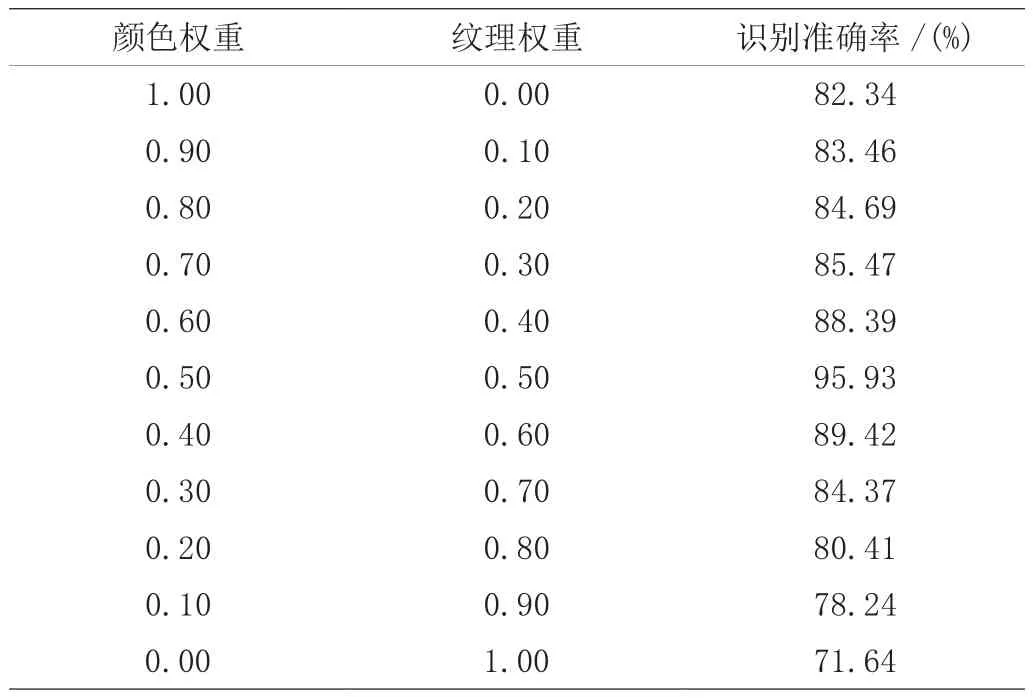
表2 本文方法在不同纹理和颜色权重下的识别准确率Tab.2 Recognition accuracy under different texture and color weights
对比3种方法在颜色与纹理权重各占0.5时,不同监测点下的边坡变相状态识别效果见表3。分析表3可知,同等条件下,本文方法在识别边坡变形情况时,各个监测点的边坡变相状态识别准确率较高,保证具有良好的识别效果,进而具有较强的实际应用性能。
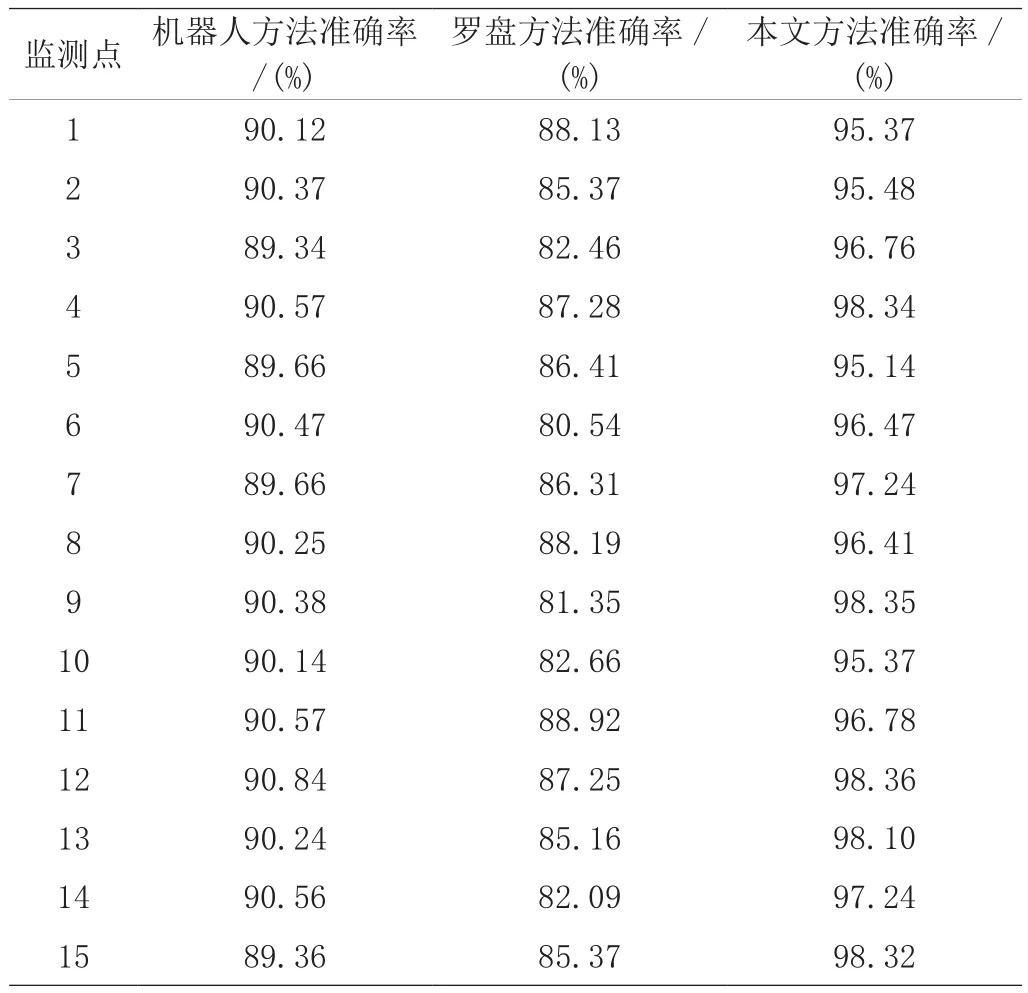
表3 边坡变形状态识别准确率对比结果Tab.3 Comparison results of accuracy rate of slope disguised state identification
3 结 论
1)本文基于无人机测绘技术,研究露天矿区边坡变形识别方法。通过无人机测绘获得高精度露天矿区图像,通过图像配准,校正图像中存在的偏倚和倾斜问题,重构露天矿区边坡的三维实景模型,
2)使用差值算法解决图像中存在的偏移问题,使用空三解算方法解决图像倾斜问题,为边坡变形识别打下良好基础,根据监测点位移状况识别出边坡变形情况。无人机测绘获得的露天矿区数据信息较清晰且准确度更高,缓解了采集成本过高、识别准确率较低等问题,在同类方法中具有绝对优势。
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30 06:10:38
健康之家(2021年19期)2021-05-23 11:17:39
电子乐园·上旬刊(2021年8期)2021-05-16 09:55:48
医学食疗与健康(2021年27期)2021-05-13 18:46:23
农业科技与信息(2021年2期)2021-03-27 07:27:38
浙江国土资源(2019年10期)2019-10-31 03:17:00
建材发展导向(2019年10期)2019-08-24 06:25:28
中国交通信息化(2018年5期)2018-08-21 03:37:40
中国公共安全(2017年7期)2017-10-13 08:18:11
电子制作(2017年9期)2017-04-17 03:01:00
