
自适应前照灯系统论述
2022-05-23 12:06李大航郑志军李运飞张启宇龚和明
汽车电器 2022年5期
李大航, 郑志军, 李运飞, 张启宇, 龚和明
(上汽大众汽车有限公司, 上海 201805)
1 AFS系统研发背景
传统的前照灯系统主要由近光灯、 远光灯、 日间行车灯 (简称日行灯)、 位置灯和前雾灯组合而成。 当车辆行驶在照明效果较好的城市道路时, 我们一般采用近光灯进行照明; 当车辆行驶在昏暗的乡村道路或者是高速公路时,我们一般采用近光灯和远光灯组合形式进行照明; 当车辆在雾天等恶劣天气中行驶时, 我们需要打开雾灯功能; 当车辆在白天行驶时, 日行灯会被打开 (ECE标准)。 但是,在我们实际的使用中, 传统的前照灯系统往往存在着很多问题, 比如, 在一些交通状况比较复杂的城市路段, 可能由于仅仅使用近光照明无法很好地看清周边的情况, 因此很多驾驶员就会把所有能打开的灯光都打开, 包括近光灯、远光灯, 甚至是雾灯, 这样就会严重影响其他驾驶员的正常驾驶, 造成很大的安全隐患。 当然, 这种传统的照明系统在车辆进行转弯时, 转弯侧会存在一个很大的照明暗区,驾驶员无法看到弯道上照明暗区的东西, 这将严重影响驾驶员在转弯时对弯道上人员、 障碍物等的判断。 车辆在雾天、 雨天等恶劣天气的状况下行驶时, 如果前照灯的光线照射到地面积水处, 光线就会被反射出去, 这样很容易照到来车驾驶员的眼睛, 造成炫目, 存在严重的驾驶安全隐患。 欧洲汽车照明研究机构曾对此做过专项调查, 调查结果显示, 欧洲驾驶员们最希望改善的是阴雨天气积水路面的照明, 排在第二位的是乡村公路的照明, 接下来依次是弯道照明、 高速公路照明和市区照明。
上述种种问题的存在, 促使汽车厂商和灯具厂商不得不考虑研发一种新型的智能前照灯系统, 以便给客户带来更好、 更智能的照明效果, 使出行更安全。 在这种环境下,自适应前照灯系统应运而生。
2 静态AFS系统的实现
到目前为止, 各大车灯供应商以及整车公司均在AFS领域内进行了广泛而深入的技术研究。 当然, 不同的厂商AFS实现的方式不尽相同, 但设计思路和原理基本类似。因此, ECE对几种典型的AFS照明模式修订在法规中。
2.1 C模式基础近光模式
C模式基础近光模式即普通的近光灯, 如图1所示。 在该模式下, AFS系统具有自动开启关闭近光灯的功能, 该功能主要是通过挡风玻璃上方的光线传感器检测外部光线的强度, 并将光线的强度信号发送给汽车的主控制器, 主控制器对前照灯发出相应的指令, 从而控制前照灯作出相应的动作。 比如, 汽车在穿越一个很长的隧道, 光线传感器检测到照明条件不足时, AFS系统会自动打开近光灯;当汽车慢慢驶出隧道口时, 随着外部环境越来越亮, 光线传感器检测到照明条件充足时, AFS系统会自动关闭近光灯功能。
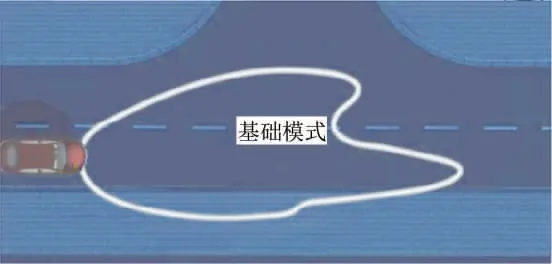
图1 基础近光模式照明
2.2 V模式城镇模式
一般情况下, 城镇道路比较复杂, 人流车流比较密集,这就要求汽车照明的范围要大。 当然, 由于城镇中路灯比较多, 光线相对比较明亮, 这种情况下, 对汽车照明距离的要求就不是很高了。
传统的照明或者基础模式的近光的照射范围一般比较狭长, 一方面会造成道路两旁的照明不足, 驾驶员无法对道路两旁的行人或其他障碍物进行正确判断; 另一方面,照射距离较远容易引起炫目, 尤其是在车流人流量比较大的城市中。 研究表明, 在两车会车时, 如果射向对面驾驶员的光强超过1000cd, 这时候对面驾驶员的眼睛就会处于一个非常严重的炫目状态, 这将严重影响驾驶员正常驾驶,发生交通事故的概率会增高。 所以AFS系统对传统的照明进行了修正, 将原有照明区域适当缩短, 同时拓宽道路两侧的照明范围, 如图2所示。
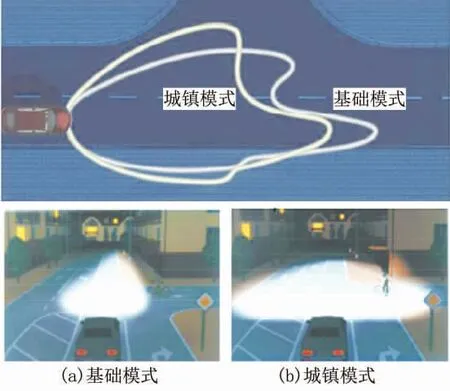
图2 AFS系统的城镇模式照明
城镇模式的控制主要是通过光线传感器来完成的。 车速一般低于60km/h (有些车辆的速度会设置为40km/h), 车速的设置主要取决于整车车身控制器的参数设置。 当光照强度达到设定的光强阈值, 车速也在规定的范围之内, 城镇模式就会自动被激活。
2.3 E模式高速模式
E模式主要应用在高速公路上, 因为车辆在高速公路上行驶的速度比较快, 所以需要的照明比普通照明照得更远。AFS系统的高速模式照明如图3所示。
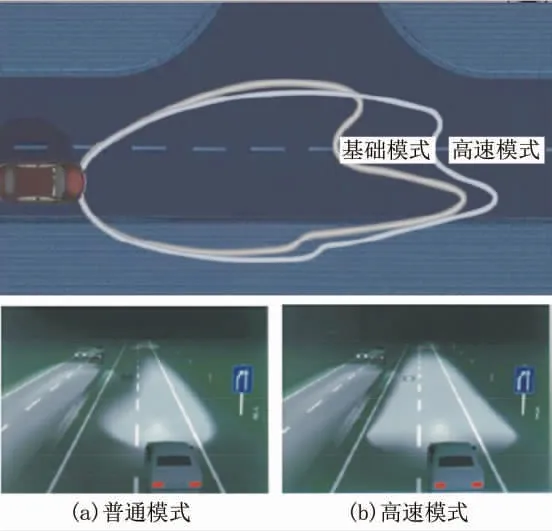
图3 AFS系统的高速模式照明
当车辆在高速公路上行驶, 并且车速高于60km/h (不同车辆的速度设置不同, 具体速度值的设置可通过修改车身控制器的参数来实现) 时, AFS系统会自动抬高近光灯的水平高度, 使光照得更远, 提高驾驶的安全性。
2.4 W模式恶劣天气模式
W模式主要应用在阴雨天气, 由于阴雨天气地面会有大量的积水, 积水会把近光灯照射到地面上的光线反射到对面来车驾驶员的眼睛里, 造成对面车辆驾驶员炫目, 影响正常驾驶, 增加了事故发生的可能性, 如图4所示。 有调查表明, 大约84%的驾驶员认为, 雨天夜晚由于地面积水反射而来的光线比对面车辆直射而来的光线更加容易造成炫目。

图4 雨天积水路面发射炫目示意图
W模式开启的条件是, 当雨量光线传感器检测到下雨时, 或者雨刮器连续工作2min (时间可根据需求设定), 传感器会将相应的信号发给AFS系统, AFS系统接收到雨天信号后会自动开启恶劣天气照明模式。 而且, 为了避免由于路面积水反射光线造成的炫目现象, W模式大大缩短了照射距离, 同时增加了左右照射范围。 一般来说, 普通近光灯的照射距离是25m, AFS系统的W模式会将近光灯的照射距离缩短到15m甚至更短, 如图5所示。
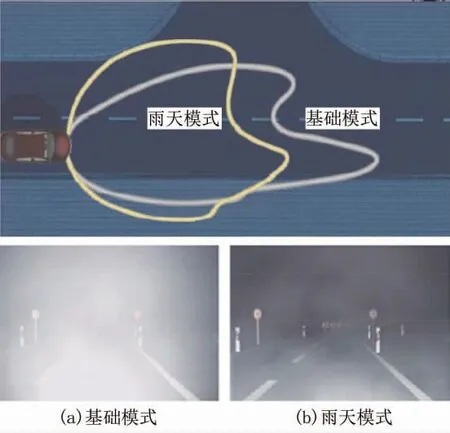
图5 AFS系统的雨天模式照明
3 动态AFS系统的实现
3.1 动态AFS系统的转弯照明
动态AFS系统的组成包括 “系统控制” (即BCM控制器)、 一个或多个 “输入和操作装置” (即AFS主控制器和AFS子控制器), 以及车辆左右侧的安装单元 (即前照灯内部的控制单元)。 动态AFS系统控制如图6所示。
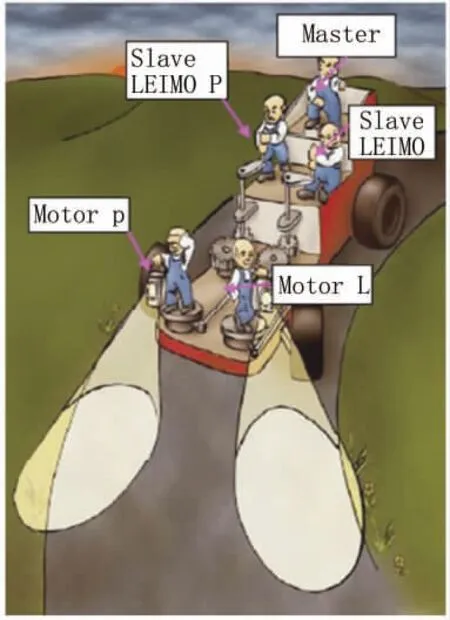
图6 动态AFS系统控制
当车辆需要转弯时, 方向盘的转角信号会发送给车身控制器, 车身控制器会将该信号传送给AFS系统, 如果AFS系统检测到方向盘转动的角度超过某个设定的值, 且此时的车速不超过30km/h, AFS系统会通过Master发出相应的指令给左右两个Slave控制器, 左右两个Slave控制器分别将转向以及需要转动的角度发给左右的Motor, 从而完成弯道照明, 如图7所示。 转动的角度一般为向内侧最大转动7°, 外侧最大转动15°。

图7 动态AFS系统转弯照明
3.2 AFS系统的MDF (Maskiertes Dauer Fernlicht) 功能
AFS系统的MDF功能主要由前部摄像头、 主控制单元以及前照灯内部的控制单元组成, 如图8所示。
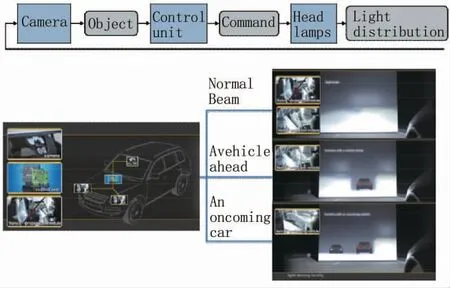
图8 MDF控制原理
MDF功能工作的过程主要是, 通过Camera检测到不同的路况信息, 将这些信息传输给中央控制单元ECU, 中央控制单元ECU会发送相应的指令给灯光控制器, 灯光控制器通过控制前照灯内部的步进电机转动, 带动相应的转毂转动, 根据转毂表面的不同形状, 投射出不同的的光型。
当前方有一辆正在行驶的车辆时, 如图9所示, 控制器会通过转毂的转动, 将前方车辆周围的光照遮挡, 避免由于前车后视镜反射光线进入驾驶员的眼睛, 同时保证周围其他地方的照明正常, 从而提高驾驶安全性。

图9 前方行驶车辆时MDF功能
当对面有来车行驶时, 如图10所示, MDF功能也会将来车周围的光线遮蔽, 避免灯光对来车驾驶员造成炫目。随着来车越来越接近, 左侧截止线会越来越低, 也就是被遮蔽的光线越来越多, 当来车驶出光线区域时, 前照灯会自动恢复到正常的照明状态。

图10 会车时MDF功能
MDF功能能够检测到来人或者其他危险物体, 前部摄像头发现前部有来人或其他物体 (不发光) 时, 会自动抬高光照, 让驾驶员能够清楚地发现来人或者危险物体, 避免事故发生。 路边物体检测如图11所示。
4 总结和展望
随着汽车灯光控制的发展, 对AFS系统的要求越来越高, 既要求在前方驾驶员区域进行有效而充分的照明, 同时又要尽一切可能减小对来车驾驶员所造成的炫目影响,还要在不同的情况下自动切换不同的模式以适应当前路况。本文针对AFS系统两个不同的方面进行了论述, 详细讲述了静态AFS系统和动态AFS系统的各种模式以及实现方式,为了能更好地实现AFS系统的价值, 给客户在每种不同的路况下都能带来更优质的照明, 静态AFS和动态AFS的混合使用, 相互取长补短, 将会成为未来AFS系统的一个方向。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中国自行车(2022年3期)2022-06-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
当代化工(2020年4期)2020-08-24
网络空间安全(2019年8期)2019-03-18
青春(2017年5期)2017-05-22
中学科技(2015年11期)2015-11-25
电影画刊(2013年3期)2013-04-25
科技传播(2012年10期)2012-06-06
