基于5G通信网络的高精度无线微震监测技术研究
2022-05-20 08:04孙学波李志福王元杰陈法兵
矿业安全与环保 2022年2期
孙学波,李志福,王元杰,陈法兵,李 岩
(1.中煤科工开采研究院有限公司,北京 100013;2.中煤科工集团沈阳研究院有限公司,辽宁 抚顺 113122)
冲击地压是目前煤矿开采过程中一个重要的研究课题。随着我国经济日益增长,对煤炭资源的需求也逐渐加大,在煤炭资源的深入开采过程中,煤岩动力灾害也随之加重。截至2019年底,在我国 18个主要产煤区中,被鉴定为冲击地压矿井的煤矿有140多个。冲击地压常导致顶板事故,从而破坏井巷,毁坏设备,污染作业环境,严重影响煤矿生产与人员的生命安全,冲击地压已成为煤矿开采过程中的重大灾害之一。
目前常用的比较典型的冲击地压治理与预防措施有矿压观察法、钻屑法、煤岩应力法、电磁辐射法、微震法、地音法等。
基于煤岩力学结构原理的矿压观察法、钻屑法、煤岩应力法的应用在一定程度上减少了冲击地压的发生,但在煤炭回采过程中,煤岩应力随开采的强度增加,再加上煤岩变化、断层、瓦斯、采空区、覆岩压力等因素的影响,冲击地压时有突发,给煤矿生产带来非常严重的灾害。可见,针对在冲击地压发生前短时间内的监测十分必要,微震法也因此得到越来越广泛的应用[1]。
微震法是基于声发射学与地震学,通过统计煤岩在开采过程中微震活动的频度与能量的大小进而对该区域发生冲击地压的危险性进行评估,根据评估结果采取相应的治理措施,以减少冲击地压灾害的发生。
进行微震预测的关键技术是对微震事件的定位。微震定位包括矿井局部危险区域与全矿井的定位,通过定位使煤矿开采人员对具有冲击危险倾向性区域的评估与判断更加精确。同时,通过对微震信号进行处理与分析,进而能够分析煤岩体的受力情况,为预防冲击地压的发生提供可靠依据[2]。
微震监测的定位算法有很多,比如:震源扫描算法(SSA)、线性定位法、Geiger定位法、牛顿迭代法等。几乎所有算法均基于监测点的位置与接收微震信号时间差来计算。比如国外较为先进的微震监测设备ARAMIS微震监测系统、ISS微震采集系统、ESG系统等,以及国内主流的KJ1160煤矿微震监测系统等,此类微震监测系统基本属于在线式监测系统,数据采集装置获取传感器信号后通过电缆或光纤上传到主计算机,主计算机再根据各个传感器的信号进行定位计算。因此各个系统的信号采集设备要装在有光纤环网或高速通信电缆的地方,且位置相对固定,这给微震系统后期移址与维护带来了一定的困难[3-4]。
由于5G网络具有较高的频点和更大的频宽,以及较低的延迟,这给数据传输带来了极大便捷,同时微震监测系统的采集点可以在5G信号覆盖的范围内自由放置,后期的升级与移址都比较方便[5]。
为此,笔者研究了基于5G通信网络的微震监测系统,采集终端采用5G通信模块接入无线网络,通信主干道的环网交换机设计为具有边界时钟的网络交换机,使整个系统支持PTP协议,保证网络的同步精度。采集终端采用24位高精度同步采样AD,操作系统采用实时操作系统FreeRTOS,数据通信采用LWIP协议,保证了系统的实时性[6-8]。
1 系统结构
该系统主要由三分量MEMS微震传感器、5G微震采集分站、5G基站、PTP环网交换机与地面计算机等构成。三分量MEMS微震传感器获取矿井现场震动信号后传递给5G微震采集分站,5G微震采集分站接收到三分量MEMS微震传感器信号后按规定的协议通过5G模块无线传输给5G基站,5G模块通过光纤经过PTP环网交换机上传到地面计算机再进行所有传感器信号处理。整个通信过程中,各5G微震采集分站通过自身的PTP协议件保证了各传感器微震信号的数字化同步。在环网路由环节,交换机具有边界时钟功能,也保证了各无线5G微震采集分站时间延迟的可控性,进而保证了整个系统的同步精度。
当地面计算机获得各传感器异常信号后,调用后台的定位与能量算法软件,得出目标位置和能量信息,为冲击地压的评估与预测提供依据。整套系统结构如图1所示。

图1 5G微震监测系统结构示意图
2 系统硬件设计
2.1 微震测量传感器的设计
该系统的传感器选用三分量MEMS微震传感器,MEMS属于微机电系统,是在微电子技术基础上发展而来的,系统融合了光刻、腐蚀、薄膜、LIGA、硅微加工、非硅微加工和精密机械加工等技术。
MEMS微震传感器的主要结构形式有变容式、压电式、压阻式、石英式及隧道式。由于测量频带与制造工艺的限制,变容式、压电式、压阻式及隧道式传感器不适合在测震中应用。而石英式微震传感器由于采用电容换能及线圈反馈的工作方式,加上该器件将所有电路及微机电结构封装于一体,所以该器件的性能指标优于常规的MEMS微震传感器,故选择的三分量MEMS微震传感器是基于石英式的微震传感器[9]。
设计的石英式传感器指标:①方向x,y,z;②灵敏度500 V/(m/s);③工作频响5~1 000 Hz(垂直);④输出信号为数字信号;⑤工作方式为三线制。
微震测量传感器的整体设计如图2所示。

图2 冲击地压测量传感器结构示意图
传感器主要由MEMS传感器芯片构成,整体结构由3个支腿支撑,同时每个支腿有一个旋钮,对传感器进行调平衡,调平衡的效果通过顶部的水准泡来观察。在安装过程中,首先找准基准线(基于平坦的水泥地面),确定x与y方位,然后通过调整支腿上的3个旋钮使传感器顶部的水准泡处于正中心位置。
2.2 5G微震分站设计
5G微震分站负责采集各三分量微震传感器震动电压信号,再对信号进行放大、滤波与AD采样。微震采集分站通过5G信号和上位机进行数据通信,把当前采样时间和AD采样值按既定协议封装成一帧数据上传到地面计算机中[10-11]。
在通信过程中,为了确保各传感器的无线数据同步采样,微震采集分站(作为时间从机)还需要与系统中的时间主机通过PTPd协议进行通信,使系统中各微震分站的采样时刻精确同步,满足微震三点定位需要。微震采集分站结构如图3所示。

图3 5G微震采集分站结构示意图
2.2.1 微震采集分站信号调理与AD采集电路设计
微震采集分站的信号输入采用差分输入,可以有效滤除前向通道中的共模干扰并降低系统本底噪声。传感器输入信号采用差分输入有两个好处:一是能够补助微小电压信号,在传统的单端系统中,微小弱信号的识别主要依赖信号线与系统信号地的一致性,一旦信号地受到噪声干扰,则信号就会受到干扰,影响系统的测量精度,信号采用差分传输,系统就避免了对信号地的依赖,减少噪声对信号地的污染;第二个好处是降低外部EMI产生的干扰,因为噪声信号几乎相同程度地影响差分信号的2根导线,而信号值取决于2根导线的电压差值,这样系统将忽略2根传输线性质相同的噪声信号,保证了原始信号的真实性[12]。
为了提高系统的采样精度,设计了传感器输入信号的驱动电路,如图4所示。THS45211DR是一款支持全差分放大器,满足本系统方案设计要求。

图4 微震分站信号调理电路图
数据采集器的采样电路选用24位精度的采样芯片ADS1278,其通过8个独立的并行ADC实现8个输入通道信号的转换,每个ADC由先进的6阶斩波Δ-Σ调制器进行数据转换。ADS1278支持高精度、高速、低功耗、低速4种工作模式,4种可选工作模式:高速模式为每秒128×103个采样点,信噪比106 dB;高精度模式为每秒52×103个采样点,信噪比111 dB;低功耗模式为每秒52×103个采样点,功耗31 mW/通道;低速模式为每秒10×103个采样点,功耗7 mW/通道[13]。
经THS45211DR放大后的差分信号接入AD采集芯片,实现模拟量到数字量的转换。
2.2.2 5G通信电路的设计
本系统需要接入5G通信网络,微震采集分站的接口选用SIM8200-M2系列通信模块。SIM8200-M2系列模块支持5G NR/LTE-FDD/LTE-TDD/HSPA+等无线通信制式,支持最高下载速率4 GiB/s和R15 5G NSA/SA的组网方式。
SIM8200-M2系列采用M.2封装,类型3052-S3-B。其AT命令与SIM7912G/SIM8300G-M2系列模块兼容,专为各种高吞吐量无线数据通信的5G应用而设计,具有高性能、高安全性和可靠性[14]。
该模块具有丰富的接口形式:
——USB2.0接口,具有高达480 Mibit/s的传输速度;
——USB3.1与SS Gen2;
——UART(U);
——SIM卡(1.8 V/3.0 V);
——以太网口;
——PCIe Gen3。
SIM8200-M2应用接口电路图如图5所示。

图5 SIM8200-M2应用接口电路图
SIM8200-M2接收无线网络信号后对主MCU进行网络同步授时,同时与MCU交互系统传感器数据,通过RJ45以太网接口进行数据通信。
2.2.3 主控制器STM32F407控制系统的设计
STM32F4是由ST(意法半导体)开发的一种高性能微控制器,其采用了90 nm的NVM工艺和ART(自适应实时存储器加速器,Adaptive Real-Time Memory AcceleratorTM)。ART技术使得程序零等待执行,提升了程序执行的效率,将Cortext-M4的性能发挥到了极致,使STM32F4系列在频率168 MHz下每秒可运行210万条指令[15]。
STM32F407主要负责采集微震传感器数据并与5G模块SIM8200-M2进行通信,和SIM8200-M2通信是通过以太网收发电路DP83848芯片,其是一款功能全、功耗低的10/100 Mibit/s单路物理器件。DP83848支持RMII接口,方便电路连接,整体接口电路图设计如图6所示。

图6 MCU与5G模块接口电路图
2.2.4 北斗卫星与网络PTP协议同步的实现
本系统中含有多个微震数据采集器,且分布在矿井的不同位置。为了实现多个微震数据采集器同步接收到同一个微震事件且与北京时间一致,通过网络PTP协议实现微震数据采集器的网络同步,通过北斗卫星系统接收标准时间实现与北京时间同步,这个标准时间可以用来和国家地震台网数据比对。整个时间协议的实现是由地面的PTP协议主机和地面北斗接收机,以及井下的微震采集器(PTP协议从机)组成。系统同步结构如图7所示。
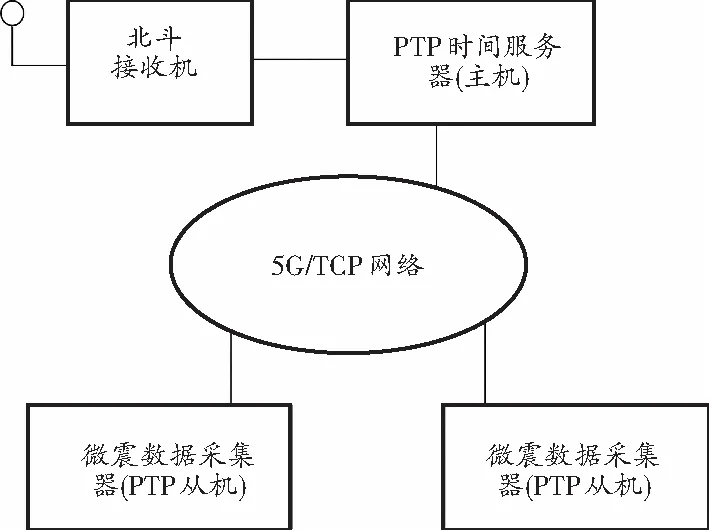
图7 北斗卫星与网络PTP协议同步系统图
卫星接收机选用北斗授时模块,北斗授时原理与GPS授时类似,北斗授时模块接收4颗或4颗以上北斗卫星系统的数据,通过接收到的数据解析出位置信息和时间信息,时间信息可以通过两种方式输出:一种是秒脉冲形式(PPS);另一种是串口协议形式,串口协议中包含具体的年、月、日、时、分、秒数据。目前北斗授时模块的精度可以达到10 ns。PTP时间服务器与系统MCU处理接收到北斗授时模块输出的时钟信息进而同步系统本地时钟,从而使系统输出的基准时间与北京标准时间同步,保证系统时间的真实性。
系统的基准时间是通过北斗授时模块来校准,分布于矿井之中不同地方的微震数据采集器的时间同步则通过网络PTP协议来完成。IEEE 1588定义了一个PTP时间同步协议,通过这个协议,对以太网内的终端(主从机)进行网络校时,理想网络环境下可以达30 ns同步精度,足以满足大部分系统的时间同步要求。PTP同步系统中的设备分为主机和若干从机,系统中有且只有一个PTP时间服务器(主机),主机时间为系统同步时钟的基准,主机再通过北斗授时模块的授时,使主机本地时间同步于北京标准时间,从而使系统中各微震数据采集器(从机)也同步于北京标准时间。
5G微震分站PTP协议同步是通过MCU处理器 (STM32F407)的内部硬件来实现的,因为STM32F407在MAC层的MII入口具备记录时间戳和调节本地PTP时钟频率的功能,整体上STM32F407支持PTPd协议[16]。
3 软件系统设计
3.1 微震采集分站嵌入式FreeRTOS操作系统
RTOS全称为 Real Time Operation System,即实时操作系统,RTOS强调的是实时性。嵌入式FreeRTOS操作系统是RTOS的一种,代码量非常小,适合在小型微处理器上使用,且是一款“开源免费”的实时操作系统,能支持许多不同硬件架构及交叉编译器。像所有操作系统一样,FreeRTOS的主要工作是执行任务处理。大部分FreeRTOS的代码都涉及优先权、调度,以及执行用户自定义任务,但又与所有其他操作系统不同,FreeRTOS是一款运行在嵌入式系统上的实时操作系统。
FreeRTOS 系统主要由BSP驱动+内核+组件组成。内核包含多任务调度、内存管理、任务间通信的功能,组件包含网络协议、外设支持、文件系统等。
相对于其他操作系统如Linux等,FreeRTOS是适用于嵌入式系统的小型实时操作系统,其调度的实时性比较好;Linux的调度采用公平性原则而不是实时性原则,所以对于实时性要求高的嵌入式系统来说,选用FreeRTOS比较适宜[17-19]。
3.2 网络LWIP通信协议
系统中主MCU通过以太网RJ45和5G通信模块进行数据交换,实现微震传感器数据的上传与网络PTP时间的接收与校准功能。为了减少网络数据通信的编程难度、提高系统的可靠性,在FreeRTOS基础上使用了LWIP网络协议,同时也在LWIP协议中移植了PTP时间同步协议,整体保证了系统的实时性、健壮性与稳定性。
LWIP 全名为 Light weight IP,LWIP一个重要特征是对运行的MCU占用内存小,减少了MCU的RAM需求,一般只要不到20 KiB的RAM和40 KiB左右的ROM就可以运行,这使得LWIP非常适合在嵌入式机器环境中应用[20]。
LWIP 的主要优点如下:支持常用网络终端应用程序,比如DHCH、DNS、TFTP与TPTP等协议,占用内存空间小,支持的协议比较完整,几乎全部支持TCP/IP中常见协议;支持多种网络编程接口,如RAW API、NETCONN API和Socket API,因为本系统使用了FreeRTOS操作系统,故网络编程接口选用了NETCONN API,接口函数主要有netconn_new()、netconn_bind()、netconn_connect()、netconn_connect()、netconn_connect()、netconn_recv()、netconn_send()。由于PTP数据报文传输采用UDP格式,需要绑定响应的接口,Event接口使用319,General接口使用320,PTP协议报文类型见表1,在LWIP中帧格式如图8所示。

表1 PTP协议的报文类型

图8 PTP数据报文在LWIP中帧格式
3.3 FreeRTOS与LWIP在STM32F407芯片上的移植
FreeRTOS主要由queue.c、tasks.c、list.c和coroutine.c几个文件组成,queue.c文件支持操作系统队列的实现,是实现计数型信号量、互斥型信号量的基础,在FreeRTOS中最重要的结构除了TCB、List就是queue了。Tasks文件实现FreeRTOS中任务的切换、调度,系统中的每一任务都有多种运行状态。系统初始化完成后,创建的任务就可以在系统中竞争一定的资源,由内核进行调度。coroutine属于协程,也是一种任务的组织形式,tasks中各任务都有自己独立的堆栈,而coroutine中各任务共享一个堆栈,所以对协程的应用有严格的限制。
FreeRTOS的移植主要是实现操作系统在STM32F407上的运行,包括如下关键移植步骤:
1)数据类型、数据结构的统一定义;
2)内核调度函数、临界区管理函数、任务优化函数的实现;
3)堆栈初始化实现,任务调度的启动,临界区进出与系统心跳时钟的实现;
4)在启动代码中修改中断向量SVC_Handle、PendSV_HandleSysTick_Handle的名称;
5)在代码编译环境中修改文件对应的路径。
经过以上修改与调整,可以实现FreeRTOS在STM32F407上稳定运行。
实现LWIP协议与FreeRTOS在STM32F407硬件上运行,首先移植LWIP协议中以太网收发芯片DP83848,实现该芯片的移植主要有2个要点:
(1)ethernetif.c的修改。该文件实现了从底层硬件驱动程序到LWIP协议的过渡,在ethernetif文件中需要根据DP83848的数据文件对如下文件进行修改:
ethernetif_init()初始化底层接口;
low_level_output()链路层发送函数;
low_level_init()网卡初始化函数;
ethernetif_input()实现接收线程。
(2)STM32F407网络驱动程序的实现。STM32F407内置了MAC层的处理能力,并且使用DMA技术强化了MAC层能力。STM32F407内置的MAC层让使用者封装字节数据为网络帧结构。MAC跟PHY通信是使用RMII或者MII接口,前者引脚使用较少,频率高,后者引脚使用较多,频率低,一般使用前者。DP83848可以使用RMII或者MII,本文使用RMII。
对网络驱动的开发,在stm32f4x7_eth.c文件中实现以太网硬件初始化、以太网硬件数据接收和发送等关键代码,通过以上代码,实现网络驱动功能。
LWIP协议在FreeRTOS中运行,是基于RTOS任务的形式来实现的,以太网接口任务接收底层硬件中断事件,同时通过信号队列传递给TCP/IP任务栈。应用程序再通过任务栈的API接口访问LWIP。
3.4 时钟同步协议PTPd协议的移植
系统中多个微震数据采集器需同步接收到同一个微震事件且与北京时间一致,通过网络PTP协议实现微震数据采集器的网络同步。PTP协议主要通过开源的IEEE 1588协议软件[17]PTPd来保障实现的。STM32F407以太网MAC层集成了IEEE 1588的硬件单元,为PTP协议的实现提供硬件基础。在FreeRTOS系统上实现PTP协议功能,首先设计STM32F407网卡硬件驱动,然后移植PTPd程序,该程序包含了最佳时钟算法程序bmc.c、协议引擎代码程序protocol.c、ptpd.c,以及一些数据定义文件等。
4 系统测试
为了测试本系统的数据同步,建立系统测试平台,如图9所示。

图9 系统测试平台结构框图
微震监测系统先采集传感器信号,然后上传到地面计算机进行数据定位分析,系统需要实现2个重要功能:一是正确获取微震信号;二是各个传感器获取信号的时间基准要一致,便于对微震事件进行定位处理。首先对测试平台本底噪声进行测试,再通过标准振动台给传感器一个正弦激励信号测试。通过实验数据观察(见图10),该系统能够正确反映信号源的特征,噪声数据误差在允许范围之内。

(a)标准振动源信号 (b)本底噪声信号
采用该系统的最终目的是监测微震信号,通过不同传感器获取具有时间差的信号进行定位,这就需要各微震分站具有相同的时间基准,以实现各分站获取的信号是处于相同时间戳的信号。系统采用的时间服务器为PTP时钟服务器,该服务器支持IEEE 1588—2008协议,同时可向下兼容IEEE 1588—2002协议,授时精度可达纳秒级,授时精度优于30 ns,5跳40%单向流量下系统授时精度优于300 ns。
5G基站选用的是中兴5G小站系列小基站产品,该产品型号丰富,可提供多种频段并支持2G、3G、4G、5G、IoT等制式单模或混模配置。
5G微震分站支持5G网络信号且可采集高频模拟电压信号,分站以高速采样率10~1 000 kHz采集2个传感器信号。
微震分站1和2的传感器分别接同一个信号发生器,当信号发生器产生同一个脉冲信号时,分别被两个微震分站获取,通过扣除采样间隔误差,在主监控器观察 2个信号的时间差,便可得出系统的同步精度。微震分站在不同采样率下测得的时间同步精度数据见表2。

表2 系统测试数据
5 结语
研究了基于5G无线通信网络的高精度微震监测技术,设计了一款支持IEEE 1588协议的无线微震监测系统,该系统通过5G网络通信模块SIM8200EA-M2进行数据通信,可实现数据的高速传输;系统同时支持PTP协议实现时间同步功能,可满足系统在分布式网络环境下的精确时间同步要求;还设计了高精度MEMS三分量微震传感器,能够实现空间立体方向上的振动信号测量。该系统在5G网络环境下,2台处于不同网络位置的5G微震分站对同一个信号进行同步采样并测试时间误差,通过多次测量并取平均值,最大精度误差不大于120 ns,表明该系统在5G网络环境下延迟小、精度高,满足冲击地压矿井微震信号智能化监测的需要。
猜你喜欢
小学科学(2022年8期)2022-09-07
世界汽车(2022年6期)2022-07-13
——2022 F1澳大利亚大奖赛
世界汽车(2022年4期)2022-05-14
舰船科学技术(2021年12期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
考试与评价·高一版(2020年6期)2020-11-02
时代英语·高一(2019年1期)2019-03-13
读者·校园版(2016年14期)2016-07-07
环球时报(2010-02-11)2010-02-11
环球时报(2009-03-18)2009-03-18