基于改进残差网络的齿轮箱故障诊断研究
2022-05-19 09:34张晓锋郝如江段泽森夏晗铎
国防交通工程与技术 2022年3期
张晓锋, 郝如江, 段泽森, 夏晗铎, 程 旺
(石家庄铁道大学机械工程学院,河北 石家庄 050043)
齿轮箱是旋转机械的关键部件,而旋转机械的机械故障约30%是由齿轮箱发生故障引起的[1]。而对机械设备进行定期的故障诊断之后,可以将事故的发生率减少75%,维修的费用也可以降低25%~50%[2]。伴随着深度学习的快速发展,科研人员逐渐将浅层的机器学习方法应用到旋转机械的故障诊断之中,常见的有支持向量机、深度置信网络、循环神经网络和卷积神经网络等故障分类方法或模型。残差网络(Residual Neural Network,ResNet)作为卷积神经网络的一种优异模型,在图像识别领域等二维信息之间应用广泛,本文对其进行改进使其具有良好的抗噪能力,以剔除具体工业环境下噪声的干扰,以利于机械故障诊断。
1 ResNet网络结构
当传统卷积神经网络较深时,模型难以直接拟合实际映射H(x),于是残差网络引入了x这一恒等映射,将问题转换为拟合残差映射F(x),只需最小化残差函数F(x)=H(x)-x来逼近实际映射,以此来解决网络在加深时特征丢失这一问题。在残差网络中,假设有L个残差块在进行堆叠连接,其中xl表示为第l个残差块的输入,那么x(l+1)就表示第l个残差块的输出,同时也是第(l+1)个残差块的数据输入。由此可推导第L个残差块的输出为:

(1)
可以发现,在残差网络中第L层的特征是各个残差块特征的累和,残差网络不断地学习每个残差块的特征,又因为训练人工神经网络常用的算法是反向传播算法,假设该神经网络的损失函数为ε,那么网络的第l个残差块梯度计算公式如式(2)所示:

(2)

2 残差网络改进
2.1 RSNB模块
通常是设置数值确定的阈值以去除冗余噪声,阈值在很多降噪中都有应用,其公式如式(3)所示,x代表输入数据,τ为阈值,即将阈值[-τ,τ]区间内的特征置为0,让距0较远的特征趋向0收缩。

(3)
本文基于深度残差网络,利用注意力机制对阈值进行改进,使网络根据数据本身自动生成相对应的阈值来消除噪声,每组数据都可以根据样本自身的重要程度不同,进行独特的特征通道加权调整[3]。该自适应阈值的生成过程如图1虚线框内所示,数据先经过权值均值池化处理,而后经过批量归一化与激活层,用sigmoid函数使输出映射到[0,1]之内,该映射缩放系数记为α,最终的阈值可以表示为α×A,则不同的样本对应不同的阈值。将自适应阈值块加入到残差网络中改进为残差收缩模块(Residual Shrinkage Network Block),称其为RSNB模块,从而达到剔除或减弱噪声的目的。

图1 RSNB模型
2.2 权值均值池化(GAP)
由于全连接层是将卷积层展开,然后对每个feature map分类,这样的参数计算量巨大,往往全连接层的参数计算量占据了网络总参数计算量的大部分,使神经网络的训练速度非常慢。为解决训练速度慢的问题将全局均值池化引入到网络中,全局平均池化是直接将每个通道的feature map做平均值处理,即一个feature map输出一个值,然后将结果输入到softmax来进行分类。在识别任务中,全局平均池化能够为最后的卷积层中的每一个特定的类别生成一个feature map(有多少个类就产生多少个feature map)。
如图2所示,GAP加入到原来的FC层,其所需要计算的参数大大减少,这很大程度的提升了网络的计算速度; GAP不需要像FC层那样大量的训练调优参数,如此避免了过拟合问题。GAP汇总了空间信息,因此对输入的空间转换更为鲁棒。为验证GAP层对网络训练时间的影响,本文在CPU版本为intel 5十代、运行环境为TensorFlow1.19 下进行实验,得到实验结果如表1所示。

图2 GAP结构

表1 训练时间对比s
通过对比,GAP层确实可以很大程度上提高模型训练的速度,因此决定在改进的残差收缩网络中加入该层来加快网络模型的训练。
2.3 改进后的残差网络结构
RSNB模块改进后的网络模型结构如图3所示,故障数据输入后先经过两个卷积层,而后输入到第一个残差收缩模块(RSNB1)中,残差收缩模块引入了批量归一化层(BN层)与ReLU激活函数。BN层可以减小训练数据的梯度差异,从而提升网络的泛化能力;ReLU激活函数增加了神经网络各层之间的非线性关系,节约大量计算,缓解过拟合现象,进而提高故障诊断效果;再将之前的Identity与之相加,再进入后续的池化层来减少网络参数,而后通过第二个残差收缩模块(RSNB2),最后通过Dense层来进行分类。
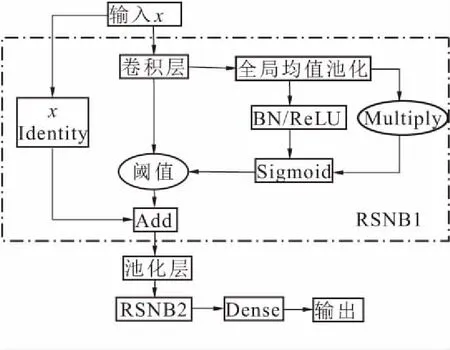
图3 改进后的残差网络结构
3 改进效果实验
3.1 实验条件
本文的实验数据来自于动力传动故障诊断综合实验台(DDS实验台)。DDS实验台主要由电机、两级传动变速箱、扭矩控制器和磁粉制动器组成。
本实验主要针对平行轴齿轮箱进行故障研究,信号采集实验将驱动电机转频设为35 Hz,信号采集频率设为12.8 kHz。本文设置了8种齿轮箱状态,包括7种故障类型与1种正常类型,具体齿轮箱零件状态如图4所示。

图4 齿轮箱零件状态
3.2 实验结果
为验证改进后网络模型的抗噪效果,分别使用目前比较先进的几种网络模型在有随机噪声和无随机噪声两种数据下进行实验,分别为CNN、ResNet和本文提出的RSNB三种网络模型。8种状态类型,每种类型选取1 536×250个样本点,共选取了1 536×2 000个点作为样本数据,其中1 536×1 600个点为训练集,1 536×400个点为测试集。将强度为-2 dB的随机噪声加入与无随机噪声状态测试相同的数据分别输入到CNN、ResNet、RSNB三个网络中,迭代次数与无噪声状态下相同。两种条件下的故障诊断准确率对比结果如表2所示。

表2 三种网络故障诊断正确率对比 %
在无噪声情况下CNN、ResNet和本文提出的RSNB表现相差不大,而在数据中加入噪声后CNN、ResNet网络的性能急剧下降,而RSNB网络可以很好的剔除噪声对网络模型的干扰。RSNB网络训练期间正确率与损失的变化如图5所示,在迭代次数达到105次左右时,分类准确率与损失值能够收敛并且保持稳定,没有发生过拟合现象,网络的分类准确率能够达到99.7%,表明所构建的网络模型在有噪声的情况下也可以保持良好的学习能力。
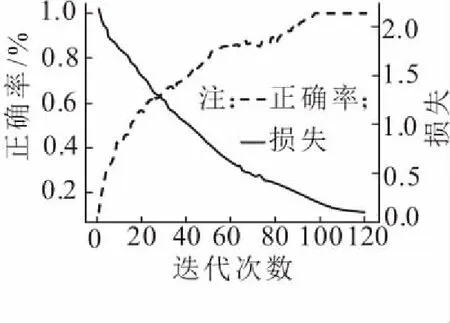
图5 RSNB训练正确率与训练损失变化
为验证RSNB的抗噪性能,测试三种网络在不同信噪比下的故障诊断准确率结果(如图6所示),发现总体而言随着数据信噪比的降低,故障诊断的效果出现下降,在信噪比为-6 dB的时候,RSNB模型的诊断精度为84%,而ResNet网络、CNN网络的故障诊断精度分别为61.1%、33.2%,低于RSNB网络的诊断精度。而当信噪比较大时,说明数据中的噪声强度对网络性能的影响变小,RSNB网络与ResNet网络都有不错的诊断效果。
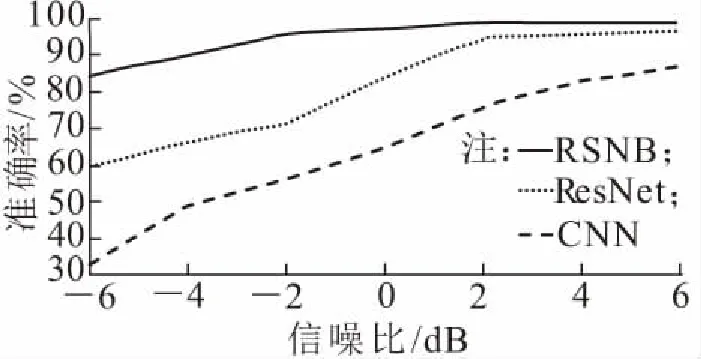
图6 不同信噪比准确率
4 结论
(1)将残差模块加入到传统CNN中进行训练,降低了在层数加深时特征丢失严重的问题,使网络可以学习到更多的数据特征,从而可以达到加深网络进而提升网络性能的目的。
(2)将注意力机制与软阈值化应用到到网络中,针对在复杂工况下的噪声问题设计自适应阈值块(RSNB)来进行处理,使神经网络根据不同的噪声特征来学习生成相应的阈值,实验结果表明自适应阈值块具有良好的降噪效果。
(3)在高强度噪声情况下,RSNB故障诊断性能明显优于其他网络模型,在中低等噪声强度下具有很高的故障诊断精度。
为了提高RSNB网络的鲁棒性,还需要采集不同实验台上的数据来进行模型的训练,并且根据不同的数据选取合适的激活函数以及网络参数,探究网络在其他类型故障诊断的应用及改进。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
交通科技与管理(2022年8期)2022-05-07
一重技术(2021年5期)2022-01-18
科学家(2021年24期)2021-04-25
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2018年10期)2018-08-04
北京航空航天大学学报(2016年6期)2016-11-16
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27