
基于BDS的毫米级基坑围墙位移监测及告警系统
2022-05-19 05:18:46潘军道蔡浩原刘振耀吴春秋张邦芾杨斌刘丰敏赵晟霖
全球定位系统 2022年2期
潘军道,蔡浩原,2,刘振耀,吴春秋,张邦芾,杨斌,刘丰敏,赵晟霖,2
( 1. 中国科学院空天信息创新研究院, 北京 100094;2. 传感技术国家重点实验室, 北京 100094;3. 国家建筑工程技术研究中心, 北京 100094;4. 建研地基基础工程有限责任公司, 北京 100094 )
0 引 言
建筑基坑安全是基坑开挖以及建筑施工的关键,基坑安全关联各种因素,贯穿整个建筑施工周期,如图1所示,在基坑开挖的施工过程中,坑内外的土压力会发生较大的改变,土压力的改变会引起基坑支护结构变形、基坑围墙沉降等危害. 周凯强等[1]对不同基坑开挖工序对基坑的影响进行了数值模拟分析,结果证实基坑围护结构水平侧移会在开挖持续进行过程中不断增加.一般情况下,在施工过程中,建筑基坑围墙的位移量、位移速率在允许范围内,理论上不会对基坑及基坑支护结构的安全产生影响.

图1 建筑基坑围墙
传统的高层建筑基坑形变监测方法[5]操作复杂,受人工操作结果一致性差、完成一次测量时间长等条件限制,传统方法存在测量误差大、测量频次低等缺点,无法满足自动化和多点同时监测的需求.
随着技术的不断进步,全球卫星导航系统(GNSS)定位技术在结构塔楼、烟囱、高层建筑和桥梁形变中得到了广泛的应用[6-8]. 郑荣跃等[9]结合工程实践和实测数据探讨了基坑水平位移和地表沉降的基本规律,建立了基坑监测过程中的预警指标体系;结合基坑的保护等级,设计了一种基于北斗卫星导航系统(BDS)的毫米级基坑围墙位移监测系统,采集解算频率为60 min/次;给出了一种自动化形变监测及告警方法.当被监测的结构水平位移和高程沉降超出阈值时,监控系统发出警报信息.
1 监测系统原理
在深基坑施工中即使采取了合理的基坑支护措施,也不能阻止支护结构和周边土体的位移、变形[2-4],
1.1 部署方案
当前对高精度位移监测的数据处理多是后处理方法[10-11],后处理方法虽然能够检测细微的位移和形变,但是不能满足监测的时效性. 针对一级基坑开挖过程中基坑围墙及支护结构需要定时检测水平位移和沉降位移问题,结合具体施工情况在基坑围墙和边坡安装基于BDS的位移监测终端,监测系统部署示意图如图2所示.
监测节点部署在基坑围墙和边坡上,节点数量视具体的基坑环境而定,主要部署在基坑围墙易发生位移和沉降的关键地方,监测节点底部通过膨胀螺钉与基坑围墙固连在一起,监测节点下侧为电池箱和天线固定结构件,上侧为GNSS测量型天线, 监测节点如图3所示.

图3 监测节点设备
1.2 系统构成
系统由基准站部分和监测点两部分构成.基准站部分包括基准站和服务器,基准站安置在距离基坑作业区周围一定距离的土方固定的位置上,基准站天空环境要求良好,无遮挡;基准站每小时将BDS观测文件和星历文件上传至服务器;监测点安装采集终端,测点分布在基坑围墙或者基坑边坡上,各个监测点同步观测卫星数据,通过4G无线网络将BDS观测文件上传至服务器,每小时1次,由服务器顺序对各个监测点数据进行短基线差分解算,对监测点的水平位移状态和沉降状态进行评估,并将解算的测点位移信息送给服务器前端显示,同时服务器对测点的位移和沉降进行成图展示,系统工作流程图如图4所示.

图4 系统工作流程图
2 形变信息的识别与告警
采用质量过程控制方法对数据进行实时检验,对解算数据检验并告警,从而完成形变信息的识别和告警.
假设监测序列服从正态分布,休哈特控制图[12]依据3倍标准差构建,通过计算形变监测量平均值µ和标准差 σ 构建异常控制限,将超出控制限的数据定义为异常数据,异常控制限的构建以 3 σ 方式构建,控制限区间为 ( µ-3σ,µ+3σ) ,则置信概率为99.73%,可以有效判别出监测序列中大的偏移数据. 如图5所示,纵轴表示监测数据,横轴表示监测数据历元.
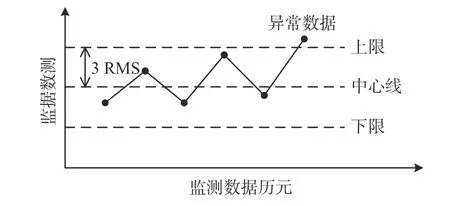
图5 休哈特控制示意图
利用形变监测量变化量的平均值 µ 和 标准差 σ 的获取形变上下限. 位移信息的识别需要对测点位置进行标定,利用测点连续一天的观测值和已知参考站的准确位置解算监测点位置序列Xi(i=1,2,···,n) ,n为样本大小,认定Xi近 似服从正态分布,Xi~N(µ0,σ) ,假设 µ0为测点的真值,上下限为 ( µ0-3σ,µ0+3σ) ,则形变监测量变化量为为测点实际监测过程中的测量值;其中参考点位置通过澳大利亚地质科学局的在线数据处理服务进行解算,直接处理为ITRF2014坐标;最终的形变测量变化量转化到本地东(E)、北(N)、天顶(U)坐标系下表示.
3 测点位置解算处理策略与算法验证
测点位置解算方法为


各个测点和参考点独立采集多频BDS数据,在数据处理部分,对每个测点和参考站之间构造双差解算方程,利用开源程序库RTKLIB[13]已有的库函数,编写BDS数据高精度位置解算程序,由位移监测告警服务调用,从而顺序解算出每个监测点在ECEF下的三维坐标,最后由位移监测告警服务进行坐标系转化,将ECEF下的坐标转化为本地E、N、U坐标[14],从而直接对测点位移进行评估和分析.
3.1 数据选取与测试
通过测试数据,在短基线条件下验证算法的正确性,数据选取澳大利亚科廷大学站点NET-R9接收机数据,选取CUT00和CUTA0两个站点基线长度为8.42 m[15]的数据;利用站点已标定的天线在ECEF坐标系下的准确位置,对位置解算程序解算的结果进行评估,测试解算程序是否具有毫米级的定位解算能力.
3.2 解算策略
用已经标定的天线位置作为基准,对解算程序解算结果做外符合精度评估,解算程序处理策略如表1所示.

表1 解算处理策略
短基线情况下,选取2020-01-01—01-02数据,小时解结果归算到E、N、U坐标系下外符合精度如图6所示.

图6 短基线外符合测试结果
由短基线数据测试结果可以得出,该解算程序在E、N、U三个方向上的误差分别可以达到1 mm、1 mm、3 mm的解算能力,可以用该解算程序进行毫米级的位移监测.
4 算例分析
4.1 数据采集
实际数据采集,实际数据测试过程中,设备部署在楼顶,模拟基坑围墙实际安装环境,其中基线长度50 m,部署节点2个,其中一个节点作为参考节点;采集节点连续工作,每天0:00—06:00、08:00—13:00、16:00—21:00这三个时间段采集数据,监测节点每小时采集一份数据上传至服务器,服务器对原始数据进行预处理,节点数据分文件夹存储,以便后续解算服务顺序对每个节点数据进行解算;每天 06:00—08:00、14:00—16:00、22:00—24:00这三个时间段休眠;参考节点和测点终端的实际天空环境,如图7所示.

图7 实际测试环境
选取2020-01-15—01-16节点数据,事后数据实际测试结果如图8所示.
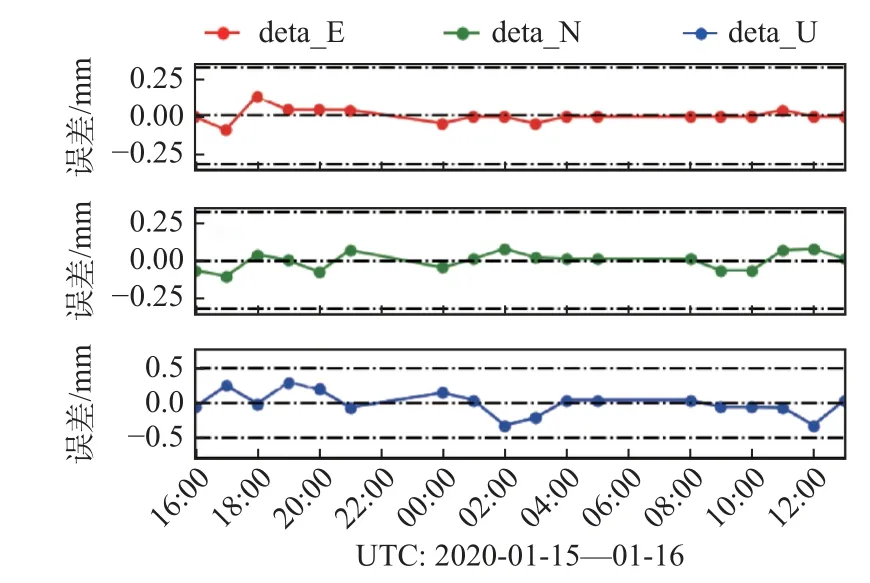
图8 实际数据事后测试结果
事后测试结果表明在E方向和N方向监测水平可以达到0.25 mm,在U方向可以达到0.5 mm.
4.2 数据结果
网页展示页面,站点状态运行结果如图9所示,图9由上至下依次为E、N、U三个方向上2021-12-01—2022-01-05动态结果图,由实际运行结果可以得出,该系统实时运行时在E方向上具备5 mm的动态监测水平,在N方向上具备4 mm的动态监测水平,在U方向上具备9 mm的动态监测水平,2021-12-17—22由于硬件调试,网页端展示结果为空.
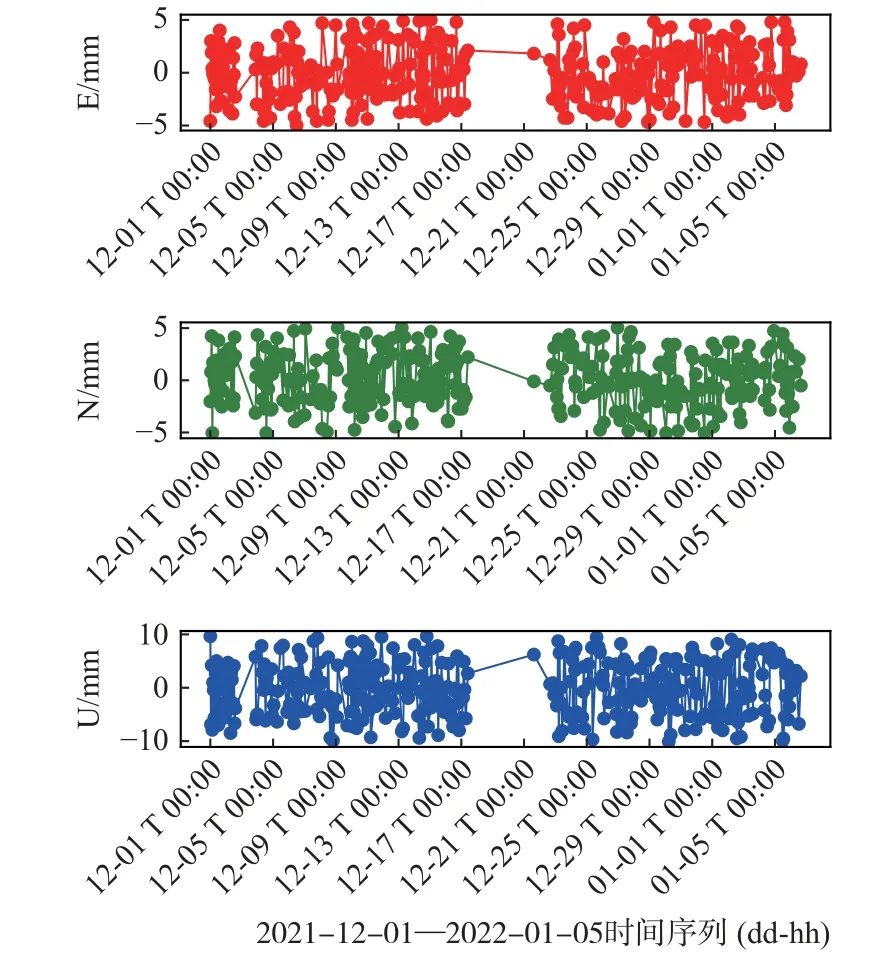
图9 系统E、N、U三方向实时运行结果图
为方便用户实时监测终端状态,系统提供了微信端公众号查看功能,可在微信小程序上随时随地查看系统结果,当E、N、U动态误差出现较大的偏差时会出现告警提示,由于目前测试中没有较大的偏差所以未出现警告提示.
4.3 数据检核
长期稳定数据不具备真实条件下形变监测能力的检验条件,因此利用光学平台对终端设备进行实际位移测试,从而达到检核系统监测能力的目的. 如图10所示,基准站采用标准的地基增强系统参考站,利用手动精密滑台对终端进行水平位移测试.

图10 水平滑台终端测试场景
对终端进行连续测试,每次测试连续1 h,由前2 h的观测数据获取终端的准确值并以此作为参考,随后每隔2 h调节一次滑台上的螺旋测微器标尺,测试结果记录如表2所示. 由水平滑台测试结果误差如图11所示可知,测试结果与实际移动相差小于3 mm.
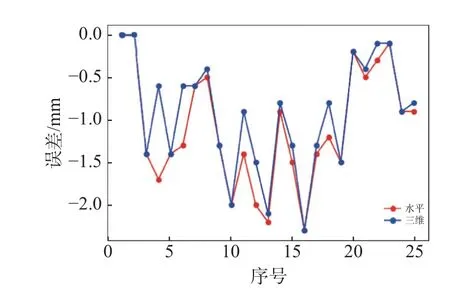
图11 水平滑台测试结果误差图
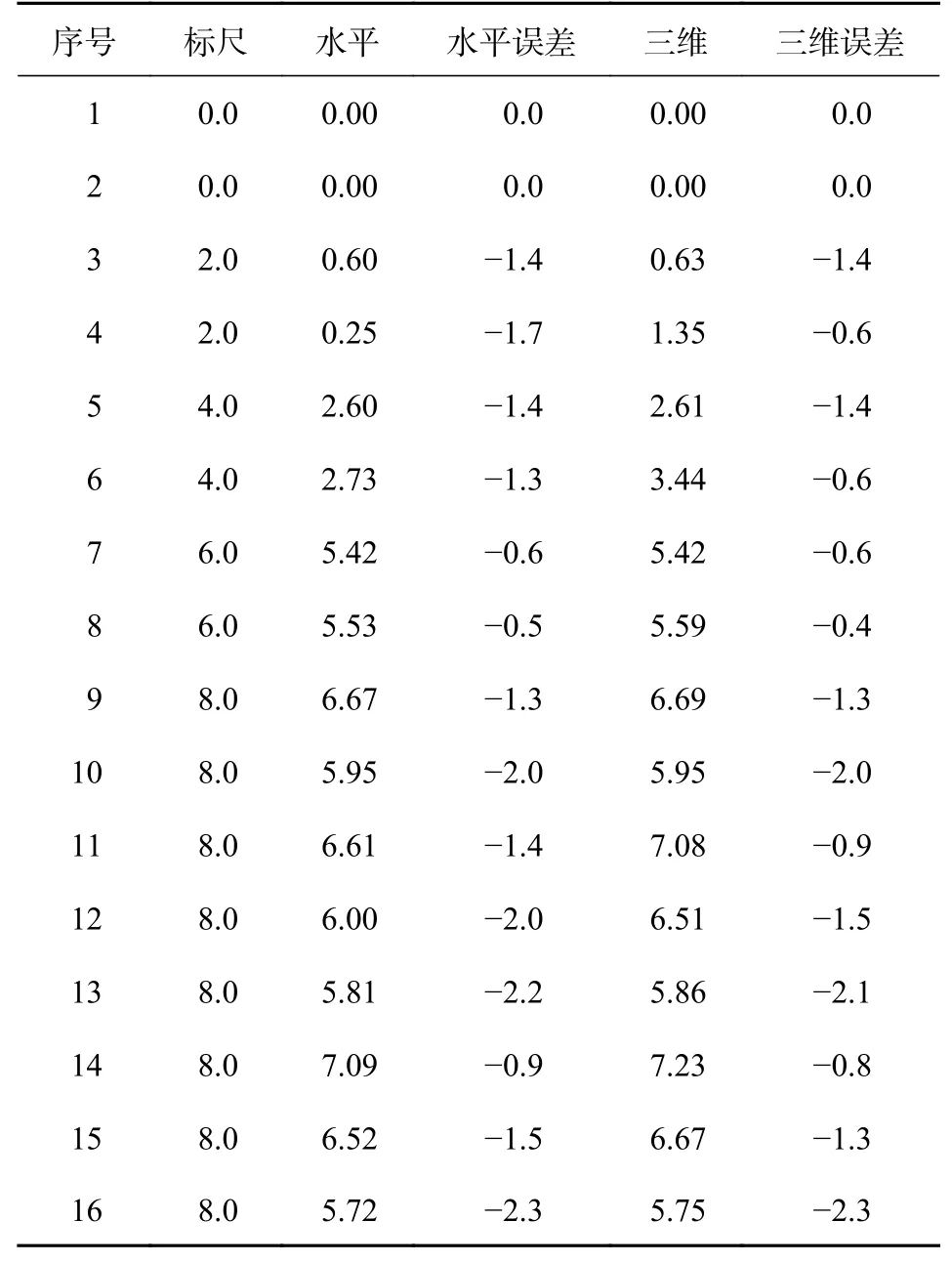
表2 移动滑台测试结果 mm
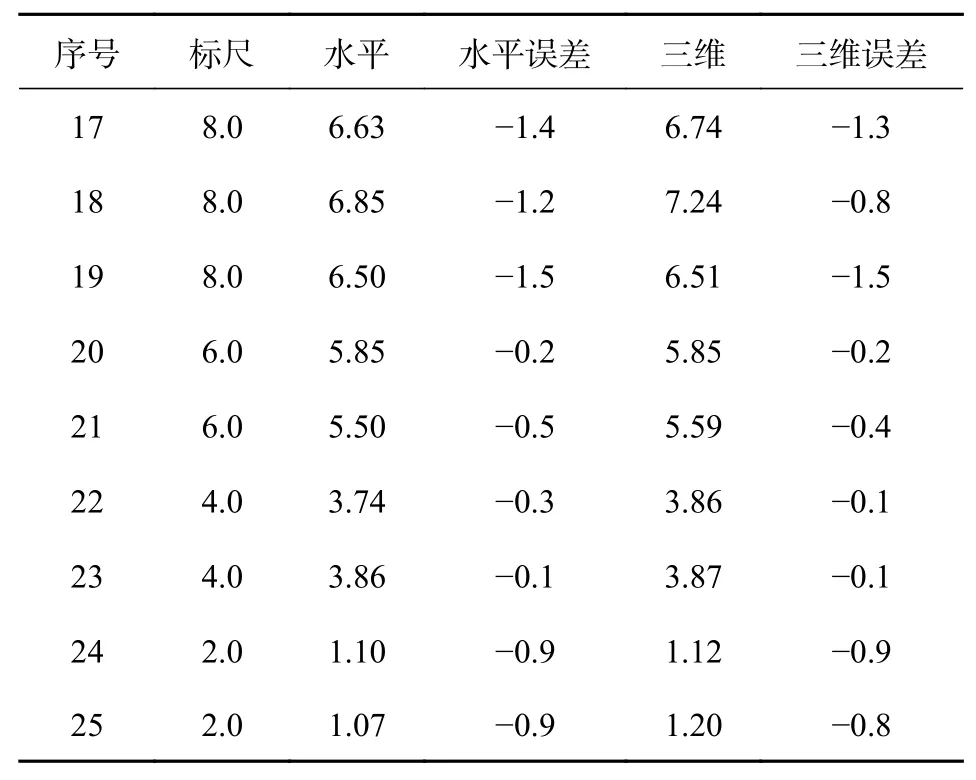
表2(续)
5 结束语
针对建筑基坑围墙及基坑边坡在建筑物施工过程中容易发生位移造成的安全隐患问题,设计了一种对基坑围墙测点的水平位移状态和沉降状态进行监测和告警的方案,给出了系统工作流程图. 在形变监测过程中利用休哈特均值控制图,构建形变阈值,在保持与预处理时置信区间一致的情况下,实现测点位移数据的无误警有效监测,同时形变监测过程中测点位移量超过阈值时在服务器前端和微信小程序上及时报警. 本文提出的方法具有方便部署和自动化处理优势,对于地壳形变、山体滑坡监测等其他领域的位移监测也存在一定的参考意义. 后续将对监测系统进行升级测试,主要集中在提高系统监测频率、降低监测节点功耗延长节点寿命及节点轻量化等工作上.
猜你喜欢
机械设计与制造(2023年2期)2023-02-27 12:40:16
中国慈善家(2022年3期)2022-06-14 10:00:32
煤气与热力(2022年4期)2022-05-23 12:44:56
散文诗世界(2022年1期)2022-01-13 13:08:43
水利水电科技进展(2021年6期)2022-01-07 02:58:02
汽车实用技术(2021年10期)2021-06-04 07:51:00
水电站设计(2020年4期)2020-07-16 08:23:48
学苑创造·A版(2017年11期)2018-01-23 21:31:09
学苑创造·A版(2016年7期)2016-07-06 17:56:15
湖南畜牧兽医(2016年3期)2016-06-05 08:37:55
