
基于格网化高精度卫星导航定位服务方法的网络RTK精度分析
2022-05-19 05:18:44吴海乐
全球定位系统 2022年2期
吴海乐
( 交信北斗科技有限公司, 北京 101318 )
0 引 言
基于全球卫星导航系统(GNSS)的连续运行参考站(CORS)服务因其高精度、高效率、实时性的优点,是当前卫星导航领域研究及工程应用的热点,为测绘、智能交通、车联网、电网、城市建设、变形监测等领域提供了高精度位置服务支撑[1-6]. 目前,工程应用中绝大部分CORS系统采用基于虚拟参考站(VRS)技术的网络实时动态定位(RTK)技术来实现区域基准站网高精度卫星导航定位服务[7-9]. 但因该技术需要在数据处理中心承担大量计算工作以及采用双向交互方式,受到网络带宽、主控站计算能力等限制[10-12]. 针对这些不足,有学者研究提出了基于格网化高精度卫星导航定位服务方法[7-8,13-14],并逐步推广到工程应用中,随着GNSS在各行业应用以及互联网大数据技术的发展,各省市CORS在升级改造中得到了诸多应用[8,15],提升了计算能力及用户交互能力.
目前,针对基于格网化高精度卫星导航定位服务方法性能指标研究主要停留在对定位结果的判断[7-8,16-17],而不同格网划分分辨率对网络RTK精度影响的研究较少. 为了研究不同格网划分分辨率对网络RTK精度影响,以及常规格网划分条件下,动态应用的网络RTK精度,本文首先介绍基于格网化高精度卫星导航定位服务方法的设计与实现,然后测试并分析了格网划分分辨率不同对网络RTK精度的影响,最后在常规格网划分条件下,选取动态场景的应用数据,分析了基于格网化高精度卫星导航定位服务方法的网络RTK动态应用精度.
1 基于格网化高精度卫星导航定位服务方法
基于格网化高精度卫星导航定位服务方法,将虚拟观测量解算与用户交互模块分开,可分布式部署,不受单个网络带宽、主控站计算能力限制,得到多方应用,提升了计算能力及用户交互能力.
1.1 基于格网化高精度卫星导航定位服务方法原理与流程
基于格网化高精度卫星导航定位服务方法是对传统VRS方法的改进[7-8],实现了用户交互模块与虚拟观测量解算模块分离,各模块可单独部署. 虚拟观测量解算模块部署在数据处理中心,接收区域基准站原始观测数据,根据预先划分的区域虚拟格网点位置信息,采用常规VRS方法分别计算区域内所有格网点的虚拟观测量. 在虚拟格网点划定后,数据处理中心计算量相对固定,资源开销变化不大,再通过单向传输的模式发送到用户交互模块. 该模式下,可设置安全的单向传输策略,保证数据处理中心基准站等数据的安全访问. 用户交互模块接收所有格网点的虚拟观测量,同用户通过双向通信的方式,根据用户概略位置判断并选择最近格网点的虚拟观测量并转发给用户[7]. 用户交互模块可根据用户量分布式部署,不受单个网络带宽、主控站计算能力限制,能够为大并发用户服务[7,9]. 综上所述,基于格网化高精度卫星导航定位服务方法改进项如表1所示.

表1 基于格网化高精度卫星导航定位服务方法改进项
基于格网化高精度卫星导航定位服务方法是对常规VRS方法的改进,该方法工作流程为:首先根据区域大小和预设的格网分辨率,划分虚拟格网点,生成格网点三维坐标;然后,数据处理中心接收并进行基准站数据预处理,选取每个虚拟格网点附近3个及以上的基准站点的数据计算虚拟格网点的虚拟观测量,生成区域增强数据信息;最后,将所有格网点的虚拟区域增强数据信息全部单向推送至用户交互模块,用户交换模块再通过移动通信网络或互联网向通过认证的终端用户推送用户请求的增强数据信息. 基于格网化高精度卫星导航定位服务方法工作流程如图1所示.

图1 基于格网化高精度卫星导航定位服务方法工作流程图
1.2 基于格网化高精度卫星导航定位服务方法设计与实现
本文基于格网化高精度卫星导航定位服务方法, 设计了高精度卫星导航定位服务软件,可提供区域高精度卫星导航定位服务,软件设计方法如下:
1)虚拟格网划分,根据区域大小和预设的格网分辨率,划分虚拟格网点. 再根据区域地形分析和高程变化,对高程变化较大的区域进行适当加密. 最后根据用户在区域内分布密度以及小区域用户精度需求,对用户分布密度较稀或精度需求较高的区域进行适当加密. 最终形成虚拟格网点划分后所有格网点的三维坐标.
2)虚拟观测量解算模块,执行基准站管理、基准站数据处理和虚拟观测量生成工作. 因基准站网观测数据和基准站坐标属于秘密数据[18],基准站管理与基准站数据处理模块部署在内网受控环境,通过专线获取基准站原始观测数据,监测各基准站实时数据流,对各基准站数据进行周跳探测、粗差探测、模糊度解算、误差分离等各项数据预处理工作. 然后,采用合适的基准站数据进行格网点虚拟观测值计算,单向推送至外网用户交互模块.
3)用户交互模块,执行用户管理与用户鉴权,正常状态的用户才能使用增强服务. 同用户交互的每个输出数据流独立线程运行,保证各用户间互无影响.通过移动通信网络或互联网向通过认证的终端用户推送距用户请求概略位置最近的虚拟格网点的增强数据信息.
基于格网化高精度卫星导航定位服务软件设计,软件运行流程如图2所示.

图2 基于格网化高精度卫星导航定位服务软件运行流程图
2 实测数据分析
为了评价格网划分分辨率不同对网络RTK精度影响,以及常规格网划分条件下,动态应用的网络RTK精度,本文进行了多项测试和分析,主要包括两方面:格网划分分辨率不同条件下,网络RTK定位精度分析;常规格网划分条件下,动态跑车场景应用精度分析.
2.1 格网划分分辨率不同对网络RTK精度影响
本文以某省作为测试区域,测试格网划分分辨率对网络RTK精度影响. 选取1个静态已知测试点,架设RTK GNSS接收机设备,型号为司南导航M300高精度定位GNSS接收机,采样频率为1 Hz,采用BDS+GPS双系统双频定位. 分别按照2′×2′、4′×4′、6′×6′、8′×8′的格网分辨率划分格网虚拟点,标记为a、b、c、d测试,每项测试运行3 h,测试点设备采用常规RTK解算方式进行定位解算. 图3为不同格网划分分辨率测试的接收机设备定位偏差序列,(a)、(b)、(c)、(d)分别为四种模式下测试定位结果同真值比较的北(N)、东(E)、天顶(U)方向的偏差. 表2列出了格网划分分辨率对网络RTK影响测试精度统计,分别为四种模式下测试定位结果的偏差在N、E、U方向的统计结果(1σ).

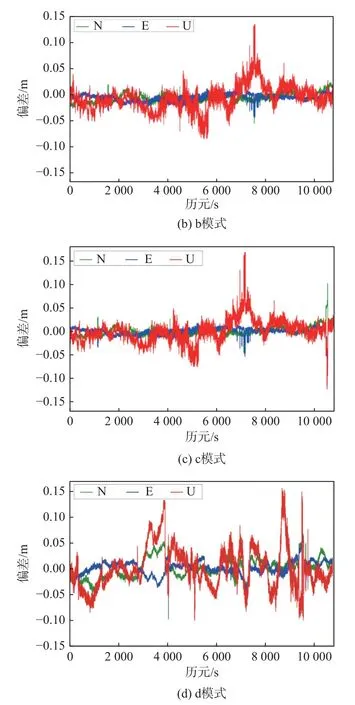
图3 不同格网划分分辨率下接收机设备定位偏差序列图
由表2和图3可知,基于格网化高精度卫星导航定位服务方法的精度为厘米级,格网划分分辨率对网络RTK有一定影响. 2′×2′和4′×4′格网划分模式下,定位残差序列除个别异常点外,几乎都在厘米级内,且精度统计相当. 随着格网划分距离增加,6′×6′和8′×8′格网划分模式下,随距离增加定位残差统计精度稍降低.

表2 格网划分分辨率对网络RTK影响测试精度统计 m
综合测试结果分析,可以选择4′×4′作为常规格网划分,满足少量相对固定的虚拟格网点观测量计算,且定位精度维持在厘米级.
2.2 动态场景
常规格网划分条件下,选取动态场景的应用数据,分析基于格网化高精度卫星导航定位服务方法的网络RTK动态应用精度.
将采集数据的RTK GNSS接收机用吸盘放在车顶,设备型号为司南导航T300 Plus GNSS接收机,采样频率为1 Hz,进行动态跑车测试,采用BDS+GPS双频双系统RTK定位方式进行测试,测试时长为30 min,GNSS天线安装如图4所示. 同时,用一台SPAN设备同时作业,作为真值. RTK GNSS接收机同SPAN设备相对位置固定,N、E、U方向为固定基线,通过两台设备基线间残差作精度测算.

图4 GNSS天线安装
跑车路线如图5所示,本次跑车在城市道路,约22 km,经过多处高架桥、隧道等路段.

图5 动态跑车测试路线图
RTK接收机采集频率为1 Hz,本次测试多处因遮挡等原因导致RTK重新初始化,有的时段为浮点解,统计得到本次测试固定解比例为94.8%. 提取固定解结果跟SPAN结果比较,基线差在N、E、U三方向的残差序列图如图6所示,动态测量结果N、E、U方向统计精度如表3所示.
由图6和表3可知,常规格网划分条件下,RTK动态定位测试水平残差序列为厘米级,高程残差序列在分米级,精度统计为水平在2 cm以内,高程在3 dm以内,固定率为94.8%,能够达到动态应用精度要求.

图6 RTK与SPAN设备动态定位测量结果偏差序列图

表3 动态测量结果精度统计 m
3 总 结
本文介绍了基于格网化高精度卫星导航定位服务方法原理与流程,设计并实现了基于格网化高精度卫星导航定位服务方法软件,然后测试分析了格网划分分辨率不同对网络RTK精度影响,最后在常规格网划分条件下,选取动态场景的应用数据,分析了基于格网化高精度卫星导航定位服务方法的网络RTK动态应用精度.
测试结果表明,随着格网划分距离增加,网络RTK精度随距离增加会降低. 其中,2′×2′和4′×4′格网划分模式下,定位残差序列除个别异常点外,几乎都在厘米级内,且精度统计相当,可以选择4′×4′作为常规格网划分,满足相对固定的虚拟格网点观测量计算,且定位精度维持在厘米级. 常规格网划分条件下,RTK动态定位水平残差序列为厘米级,高程残差序列在分米级,能够达到动态应用精度要求. 因此,基于格网化高精度卫星导航定位服务方法改进的常规VRS方法,能够支持为大并发用户服务,精度为厘米级.
本文基于静态和短距离低速动态场景对基于格网化高精度卫星导航定位服务方法精度进行了测试和分析,长距离以及复杂环境的格网化高精度卫星导航定位服务方法及性能验证是下一步需研究的问题和方向.
猜你喜欢
空间科学学报(2020年6期)2020-07-21 05:36:46
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
光学精密工程(2016年3期)2016-11-07 09:03:34
测绘科学与工程(2016年6期)2016-04-17 06:51:25
江西理工大学学报(2015年3期)2015-12-22 05:26:18
山东冶金(2015年5期)2015-12-10 03:27:41
