
电锤
2022-05-18 08:40:40陆巧男,朱伯元,孙井龙
电动工具 2022年2期
授权公告号:CN 111098412 B
授权公告日:2022.03.18
专利权人:苏州宝时得电动工具有限公司
发明人:陆巧男;朱伯元;孙井龙
电锤主要用来在混凝土、楼板、砖墙和石材上钻孔,因此广泛应用于各种领域。一般情况下,电锤在钻孔过程中需要确定其钻孔深度。目前,电锤的钻孔深度主要通过预先手动调节电锤上的机械标尺,使得电锤在钻进至预先设置的钻孔深度处停止钻进。但是,传统的机械标尺无法实时获取电锤的钻孔状态,导致相关技术中的电锤也无法基于钻孔状态实施自动控制。因此,相关技术中亟需一种可以实时获取电锤的钻孔状态,并可基于钻孔状态对电锤进行自动控制的方式。
发明专利“电锤”涉及电动工具领域,尤其涉及一种电锤。
发明内容
一种电锤,电锤包括输出头、用于驱动输出头旋转的旋转装置、用于驱动输出头轴向锤击的锤击装置、用于驱动旋转装置的旋转驱动装置、用于驱动锤击装置的锤击驱动装置、深度设置装置、深度检测装置以及控制装置,旋转驱动装置、锤击驱动装置、深度设置装置以及深度检测装置分别与控制装置电性连接;其中,深度设置装置,用于获取用户设置的目标钻孔深度;深度检测装置,用于实时获取输出头的钻孔深度;控制装置,用于根据深度检测装置实时获取的钻孔深度,控制旋转驱动装置和/或锤击驱动装置,使得输出头按照预定义的方式钻进,并在钻孔深度达到目标钻孔深度时停止钻进。
控制装置在下述中的至少一种情况下,关闭锤击驱动装置:输出头的钻孔深度大于等于目标钻孔深度;电锤无负载;输出头从钻孔中退出。
电锤还包括输出检测装置,输出检测装置与控制装置电性连接,用于检测旋转驱动装置的输出电流值、输出电流变化率、锤击驱动装置的输出电流值、输出电流变化率中的一个或多个。
控制装置用于按照下述方式确定输出头的初始钻孔深度:启动旋转驱动装置,并关闭锤击驱动装置;从输出检测装置获取旋转驱动装置的输出电流值;当输出电流值大于等于预设值时,确定输出头所处的深度为初始钻孔深度。控制装置,还用于在确定初始钻孔深度之后,开启锤击驱动装置。控制装置,还用于当从输出检测装置获取到旋转驱动装置的输出电流变化率大于等于预设输出电流变化率时,调整旋转驱动装置的旋转模式为脉冲式旋转模式。控制装置,还用于当输出头的钻孔深度大于等于目标钻孔深度且输出头停留于目标钻孔深度处的时长大于等于预设时长时,控制旋转驱动装置增大旋转装置的转速,但不会超出预设最大值。控制装置,还用于当输出头的钻孔深度与目标钻孔深度之间的差大于等于预设阈值时,控制旋转驱动装置增大旋转装置的转速,但不会超出预设最大值。
电锤还包括材质选择装置,材质选择装置与控制装置电性连接,用于获取用户选择的钻孔材质;控制装置,还用于基于输出头的参数与钻孔材质之间的匹配关系,根据材质选择装置指示的材质调整旋转驱动装置和锤击驱动装置生成与材质相匹配的输出头的参数,输出头的参数包括输出头的旋转速度和/或锤击频率。控制装置,还用于根据旋转驱动装置的输出电流值、输出电流变化率、锤击驱动装置的输出电流值、和输出电流变化率中的一种或多种,确定输出头正在钻进的材质,并基于输出头的参数与材质之间的匹配关系,根据材质调整旋转驱动装置和锤击驱动装置生成与材质相匹配的输出头的参数,输出头的参数包括输出头的旋转速度和/或锤击频率。
旋转驱动装置包括第一电机,锤击驱动装置包括第二电机,第一电机和第二电机相对设置;旋转驱动装置包括第一电机,锤击驱动装置包括第二电机,第一电机和第二电机并列设置,且第一电机的输出轴和第二电机的输出轴平行。
上述电锤,可以使用不同的驱动装置分别驱动电锤的旋转装置和锤击装置,因此可分别调整旋转装置与锤击装置的工作状态,从而使输出头具有不同的钻进方式,旋转装置驱动输出头旋转的同时,锤击装置驱动输出头轴向运动,从而同时向被加工件施加扭矩 及轴向冲击力,提高打孔效率,满足不同的工况,有效提高该电锤的打孔效率。另外,用户可以通过深度设置装置设置需要钻孔的目标钻孔深度,电锤中的深度检测装置可以实时监控 输出头的钻孔深度,使得电锤中的控制装置能够根据实时钻孔深度准确地控制电锤的钻进方式,并在钻孔深度达到目标钻孔深度时停止钻进。
实施方式:
图1 示出了电锤100。图2 示出的控制模块的结构示意图。
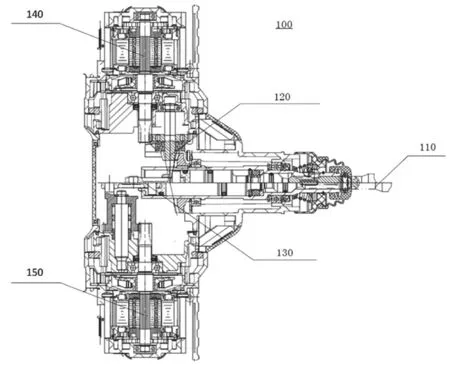
图1
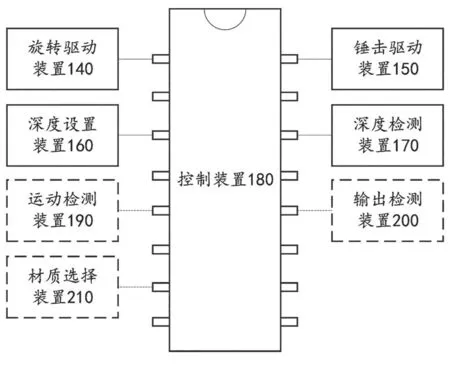
图2
电锤100 包括输出头110、用于驱动输出头110 旋转的旋转装置120、用于驱动输出头110 轴向锤击的锤击装置130、用于驱动旋转装置的旋转驱动装置140、用于驱动锤击装置的锤击驱动装置150、深度设置装置160、深度检测装置170 以及控制装置180,旋转驱动装置140、锤击驱动装置150、深度设置装置160 以及深度检测装置170 分别与控制装置180 电性连接;其中,深度设置装置160 用于获取用户设置的目标钻孔深度;深度检测装置170 用于实时获取输出头110 的钻孔深度;控制装置180 用于根据深度检测装置170 实时获取的钻孔深度,控制旋转驱动装置140 和/或锤击驱动装置150,使得输出头110 按照预定义的方式钻进,并在钻孔深度达到目标钻孔深度时停止钻进。在本申请的一个实施例中,当输出头110 的钻孔深度大于等于目标钻孔深度时,控制装置180 可以关闭锤击驱动装置150,而对于旋转驱动装置140,可以关闭,也可以不关闭,使其继续工作,对此不做限制。深度设置装置160 可以设置于电锤100 的外壳上,可以包括显示器、按钮等组成部分,当然,还可以包括触敏显示器等。用户可以通过在按钮或者触敏显示器输入需要钻孔的目标钻孔深度,例如60mm、80mm、35mm 等等。深度设置装置160 与控制模块180 电性连接。当深度设置装置160 获取到用户设置的目标钻孔深度之后,可以将目标钻孔深度发送至控制模块180。深度检测装置170 用于实时获取输出头的钻孔深度。深度检测装置170 可以包括激光传感器,通过激光传感器在钻孔内发射激光之后获取的信号确定钻孔的深度。深度检测装置170 还可以包括深度摄像头。深度检测装置170 还包括任何其他可以实时测量钻孔深度的装 置,对此不做限制。图2 示出了电锤100 中旋转驱动装置140、锤击驱动装置150、深度设置装置160、深检测装置170、控制装置180 之间的模块结构图。控制装置180 可以包括集成电路芯片、单片机、ARM 等处理器,处理器上设置有多个引脚,并可以通过引脚将旋转驱动装置140、锤击驱动装置150、深度设置装置160、深度检测装置170 分别与控制装置180 电性连接。控制装置180 可以通过调节旋转驱动装置140 的输入电压和/或输入电流控制旋转装置120 的转速,还可以通过调节锤击驱动装置150 的输入电压和/或输入电流控制锤击装置130 的锤击频率。输出头110 的钻进方式包括多种预定义方式,例如打开或者关闭输出头110 的旋转功能、锤击功能,以及调节输出头110 的旋转速度和/或锤击频率。上述电锤,可以使用不同的驱动装置分别驱动电锤的旋转装置和锤击装置,因此可分别调整旋转装置与锤击装置的工作状态,从而使输出头具有不同的钻进方式,旋转装置驱动输出头旋转的同时,锤击装置驱动输出头轴向运动,从而同时向被加工件施加扭矩及轴向冲击力,提高打孔效率,满足不同的工况,有效提高该电锤的打孔效率。另外,用户可以通过深度设置装置设置需要钻孔的目标钻孔深度,电锤中的深度检测装置可以实时监控 输出头的钻孔深度,使得电锤中的控制装置能够根据实时钻孔深度准确地控制电锤的钻进方式,并在钻孔深度达到目标钻孔深度时停止钻进。
考虑到在很多情况下需要关闭锤击装置,因此,可以设置控制装置180 在下述中的至少一种情况下,关闭锤击驱动装置150:输出头 110 的钻孔深度大于等于目标钻孔深度;电锤100 无负载;输出头110 从钻孔中退出。当输出头110的钻孔深度大于等于目标钻孔深度,若锤击装置130 还继续锤击,则可能造成钻孔深度快速变大,使得钻孔深度大于目标钻孔深度。若控制装置180 检测到电锤无负载,则可以关闭锤击驱动装置150。电锤100 中还可以包括运动检测装置190,运动检测装置190 与控制检测180 电性连接。通过运动检测装置190 可以检测输出头110 的运动方向、运动速度等运动参数。若运动检测装置190 检测到输出头110 从钻孔中退出,则控制装置180 可以关闭锤击驱动装置150,以停止电锤100 的锤击功能。电锤100 还包括输出检测装置200,输出检测装置200 与控制装置180 电性连接,用于检测旋转驱动装置140 的输出电流值、输出电流变化率、锤击驱动装置150 的输出电流值、输出电流变化率中的一个或多个。
基于此,如图3 所示,控制装置180 用于按照下述步骤确定输出头110 的初始钻孔深度:步骤301,启动旋转驱动装置140,并关闭锤击驱动装置150。步骤303,从输出检测装置200 获取旋转驱动装置140 的输出电流值。步骤305,当输出电流值大于等于预设值时,确定输出头110 所处的深度为初始钻孔深度。在确定初始钻孔深度之后,可以开启锤击驱动装置150。控制装置180 还用于当从输出检测装置200 获取到旋转驱动装置140 的输出电流变化率大于等于预设输出电流变化率时,调整旋转驱动装置140 的旋转模式为脉冲式旋转模式。

图3
当外界给电锤100 的扭矩突然增大,表现为旋转驱动装置140 的输出电流变化率大于等于预设输出电流变化率,此时,可以将旋转驱动装置140 的旋转模式调整为脉冲式旋转模式。脉冲式旋转模式可以相对于持续高速旋转模式而言,其中,高速旋转模式可以包括持续以大于某个阈值的转速旋转的模式。而脉冲式旋转模式可以在高速旋转中穿插低速旋转、停止旋转、反向旋转等多种运动方式中的至少一种。调整旋转驱动装置140 的旋转模式为脉冲式旋转模式法的目的在于避免电锤受到的瞬间持续大扭力传递给用户,造成用户受伤。另外,输出头110 还可以保持原有的锤击频率。控制装置180 还用于当输出头110 的钻孔深度大于等于目标钻孔深度且输出头110 停留于目标钻孔深度处的时长大于等于预设时长时,控制旋转驱动装置140 增大旋转装置120 的转速,但不会超出预设最大值。当钻孔完成后,钻孔中往往残留有很多灰尘杂物等,因此,可以通过增大旋转装置120 的转速,以排出钻孔中的灰尘杂物等。基于此,可以设置当控制装置180 通过深度检测装置170 检测到输出头110 的钻孔深度大于等于目标钻孔深度,并通过运动检测装置190 检测到输出头110 停留于目标钻孔深度处的时长大于 等于预设时长(如2 秒钟、3 秒钟)时,控制旋转驱动装置140 逐步增大旋转装置120 的转速,但不会超出预设最大值。控制装置180 还可以用于当输出头110 的钻孔 深度与目标钻孔深度之间的差大于等于预设阈值时,控制旋转驱动装置140 增大旋转装置120 的转速,但不会超出预设最大值。当输出头110的钻孔深度与目标钻孔深度还有较大的距离时,如(钻孔深度-目标钻孔深度)大于等于预设阈值时,可以控制旋转驱动装置140 增大旋转装置120 的转速,但不会超出预设最大值。预设阈值可以为-0.5、0、0.5 等等,当然,也可以为任何数值,对此不做限制。增大旋转装置120 的转速之后,可以提高输出头110 的钻进速度,提高钻进效率。如图2 所示,电锤100 还可以包括材质选择装置210,材质选择装置210 与控制装置180 电性连接,用于获取用户选择的钻孔材质。基于此,控制装置180 还可以用于基于输出头110 的参数与钻孔材质之间的匹配关系,根据材质选择装置210 指示的材质调整旋转驱动装置140 和锤击驱动装置150 生成与材质相匹配的输出头的参数,输出头110 的参数包括输出头110 的旋转速度和/或锤击频率。当输出头110 遇到不同的钻孔材质,可以设置不同的参数,参数包括输出头110 的旋转速度和/或锤击频率。在一个示例中,为钢板、瓷砖、混凝土、砖墙等多种材质分别设置相应的输出头参数。材质选择装置210 可以设置于电锤100 的外壳上,例如可以为旋转按钮、按键按钮等结构,用户可以通过材质选择装置210 选取所需要钻孔的材质。
控制装置180 还用于根据旋转驱动装置140 的输出电流值、输出电流变化率、锤击驱动装置150 的输出电流值、和输出电流变化率中的一种或多种,确定输出头110 正在钻进的材质,并基于输出头110 的参数与材质之间的匹配关系,根据材质调整旋转驱动装置140 和锤击驱动装置150 生成与材质相匹配的输出头110 的参数,输出头110 的参数包括输出头110 的旋转速度和/或锤击频率。由于输出头在钻进不同的材质时旋转驱动装置140 和锤击驱动装置150 的输出值不相同。基于此,控制装置180 还可以根据输出检测装置200 获取的旋转驱动装置140 的输出电流值、输出电流变化率、锤击驱动装置150 的输出电流值、和输出电流变化率中的一种或多种,确定输出头110 正在钻进的材质。旋转驱动装置140 可以包括第一电机,锤击驱动装置150 可以包括第二电机,如图1 所示,第一电机和第二电机可以相对设置,且第一电机的输出轴和第二电机的输出轴共线。
图4 是图1 中旋转装置120 的局部图,如图4 所示,旋转装置120 可以包括第一齿轮121、锥齿轮轴123、大锥齿轮125、轴套127 以及轴套双键129。在利用旋转驱动装置140 驱动旋转装置120 旋转的过程中,旋转驱动装置140 旋转带动电机齿轮141 旋转,电机齿轮141 旋转带动第一齿轮121 旋转。第一齿轮121 和锥齿轮轴123 之间通过销或者钢球或者过盈压装传递扭力,因此,锥齿轮轴123 旋转。锥齿轮轴123 旋转带动大锥齿轮125 旋转。大锥齿轮125 和轴套127 之间通过销或者钢球或者过盈压装传递扭力,因此,轴套127 旋转。轴套127 旋转带动轴套127 上的轴套双键129 旋转,轴套双键129 旋转带动输出头110 旋转。
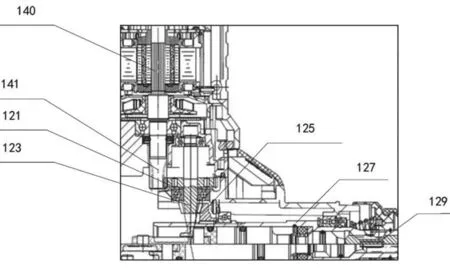
图4
图5 是图1 中锤击装置130 的局部图,如图5 所示,锤击装置130 可以包括第二齿轮131、偏心销132、连杆133、活塞134、气垫135、撞锤136、撞杆137。在利用锤击驱动装置150 驱动锤击装置130 旋转的过程中,锤击驱动装置150 旋转带动电机齿轮151 旋转,电机齿轮151 旋转带动第二齿轮131 旋转。第二齿轮131 旋转带动偏心销132 绕第二齿轮131 的轴线旋转。偏心销132 旋转带动连杆133 运动。连杆133 通过活塞销(未示出)与活塞134 连接,因此,连杆133 运动带动活塞134 在轴套127 内往复运动。活塞134 运动压缩气垫135,从而带动撞锤136 往复运动。撞锤136往复运动撞击撞杆137 往复运动。撞杆137 往复运动撞击输出头110,使得输出头110 往复运动。

图5
如图6 所示,旋转驱动装置140 包括第一电机,锤击驱动装置150 包括第二电机,第一电机和第二电机并列设置,且第一电机的输出轴和第二电机的输出轴平行。图7 是图6 中旋转装置120 的局部图,如图4 所示,旋转装置120 可以包括第一齿轮121、齿轮轴123、大齿轮125。在利用旋转驱动装置140 驱动旋转装置120 旋转的过程中,旋转驱动装置140 旋转带动电机齿轮141 旋转,电机齿轮141 旋转带动第一齿轮121 旋转。

图6

图7
第一齿轮121 和齿轮轴123 之间通过销或者钢球或者过盈压装传递扭力,因此,齿轮轴123 旋转。齿轮轴123 旋转带动大齿轮125 旋转。大齿轮125 和轴套127 之间通过销或者钢球或者过盈压装传递扭力,因此,轴套127 旋转。轴套127 旋转带动轴套127 上的轴套双键129 旋转,轴套双键129 旋转带动输出头110 旋转。
图8 是图6 中锤击装置130 的局部图,如图8 所示,锤击装置130 可以包括第二齿轮131、摆杆轴承132、气缸133、气垫134、撞锤135、撞杆136。在利用锤击驱动装置150 驱动锤击装置130 旋转的过程中,锤击驱动装置150 旋转带动电机齿轮151 旋转,电机齿轮151 旋转带动第二齿轮131 旋转。第二齿轮131 旋转带动摆杆轴承132 绕第二齿轮 131 的轴线旋转。摆杆轴承132 旋转带动气缸133 在轴套127 内往复运动,从而循环压缩气垫134,带动撞锤135往复运动。撞锤135 往复运动撞击撞杆136 往复运动。撞杆136 往复运动撞击输出头110,使得输出头110 往复运动。需要说明的是,第一电机和第二电机之间的位置关系还可以包括垂直、呈30 度角、呈60 度角等等,当然还可以包括任何角度的位置关系,对此不做限制。

图8
发明专利“电锤”还可以有其它实施方式,凡采用等同替换或等效变换形成的技术方案,均落在其要求保护的范围之内。
猜你喜欢
内燃机工程(2021年6期)2021-12-10 08:07:46
装备制造技术(2020年9期)2021-01-26 00:14:50
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
少儿科学周刊·少年版(2020年9期)2020-03-04 11:38:12
时代汽车(2019年6期)2019-07-09 23:33:04
水电与抽水蓄能(2019年1期)2019-03-08 05:17:10
中学生数理化·八年级物理人教版(2018年9期)2018-11-09 01:21:52
制造技术与机床(2017年3期)2017-06-23 08:11:52
现代工业经济和信息化(2016年4期)2016-05-17 05:35:43
Coco薇(2015年10期)2015-10-19 12:17:50
