露天矿巡检机器人设计及严寒环境下电池预热性能研究
2022-05-13 11:41郝志东
煤炭工程 2022年5期
郝志东
(神华北电胜利能源有限公司,内蒙古 锡林浩特 026015)
煤炭在我国能源布局中一直占据着主体地位,我国煤矿主要以井工矿为主,露天矿产煤量约占我国煤炭总产量的10%[1]。随着露天煤矿大型机械化开采的推进,露天煤矿生产能力强、工作环境安全等优势逐渐凸显,因此,我国露天煤矿的开采比例逐年增大[2]。我国露天煤矿分布有着典型的地域趋势,主要分布在新疆、内蒙古等北部地区,这些地区冬季温度较低,甚至能够达到-40℃,在这种严寒条件下,对机械设备尤其是电池性能提出了较为严格的要求[3-5]。
目前露天煤矿在生产中,带式输送机的状态监测方式仍以人工徒步巡检为主[6]。人工巡检主要依靠巡检人员完成对带式输送机定时定点的监测,凭借其工作经验和主观感知对其运行状态做出判断[7-9]。然而,这种方式也导致了许多问题,一方面由于带式输送机监测点多、工作量大,容易出现漏检,误检现象;另一方面带式输送机故障监测精度要求高,而巡检人员往往在事故发生后才能做出响应,无法将事故防患于未然[10-12]。
针对现场人工巡检存在的诸多问题和弊端,本文提出了巡检智能化的解决思路,用机器人自动巡检代替人工巡检,提高矿山智能化建设水平。但因现场环境特殊,最低环境气温达到-40℃,对矿用巡检机器人的供电和驱动方式提出了更高的技术要求。
1 总体方案设计
露天煤矿的地面情况较为复杂,采用陆地行驶的巡检机器人虽然灵活性较高,但是,在这种复杂地面情况不能实现高可靠性的导航和定位,因此,露天煤矿胶带巡检机器人一般是采用吊轨式及挂绳式的巡检机器人结构[13,14],本文首先对这两种巡检机器人在严寒露天矿的应用场景的优缺点及设计方案进行分析,讨论这两个机器人的适用性。
1.1 吊轨式巡检机器人
吊轨式巡检机器人系统由机器人本体、无线充电系统、工字钢轨道系统、无线通讯系统、机器人集群监控调度系统组成,如图1所示。
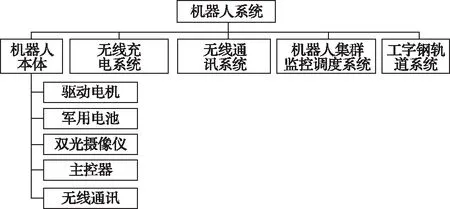
图1 吊轨式巡检机器人系统架构
机器人本体搭载军工级双光云台摄像仪、军用低温电池、主控制器、无线充电接收系统、无线通讯接收模块、驱动电机及行走机构组成,如图2所示。机器人行走机构由导向轮系、支撑轮系、和驱动轮系组成。导向轮负责机器人沿轨道行驶不偏离轨道,支撑轮负责承担机器人本体重量,驱动轮提供机器人前进的牵引力。压紧弹簧提供驱动轮与轨道间的正压力。驱动机构最大行走速度0.6m/s。最大爬坡角度为10°,可斜坡驻停。
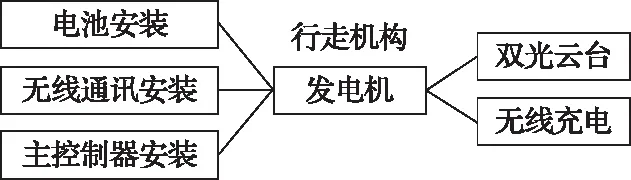
图2 机器人组成结构
当巡检胶带长度小于400m时机器人在胶带单端无线通讯安装无线充电桩,胶带长度小于800m时在胶带两端安装无线充电桩,超过800m时每间隔800m安装1个充电桩,如图3所示。另外可根据胶带实际情况进行核算。巡检机器人平均行走预估速度为0.3m/s,单台带式输送机以1000m为基准,巡检一次约1h;采用定制功率充电机充电时间1h,每天可巡检12次。可根据胶带长度进行核算。

图3 吊轨式机器人布置
1.2 挂绳式巡检机器人
挂绳式巡检机器人主要采用钢丝绳牵引方式,该系统由机器人本体、ACDC电源模块、钢丝绳牵引系统、无线通讯系统、机器人集群监控调度系统组成,如图4所示。其中机器人在巡检路径两端加装三层保护,分别用行程开关和接近开关限制机器人位置。用编码器校准位置。实现机器人实时位置感知和控制保护。

图4 吊绳式巡检机器人系统架构图
钢丝绳牵引系统由自承式钢索线缆、两个卷扬机、两个磁粉离合器、两个控制箱和两个制动器组成,如图5所示。控制箱A和控制箱B密切联动实现电机的的正向和反向控制,通过磁粉离合器实现钢丝绳的姿态张紧,制动器可实现机器人在任意位置的停止实现刹车作用。另外控制箱内安装漏电保护器,起到安全保护作用,防止短路。考虑机器人安装在露天室外,单纯的钢丝绳牵引会导致机器人晃动,甚至撞到防雨棚,该方案同样使用工字钢轨道,防止机器人剧烈晃动。

图5 吊绳式机器人布置图
巡检机器人采用挂绳器与钢丝绳相连,钢丝绳安装在导向托轮上,通过钢丝绳的移动,能够带动机械人往复运行于两个卷扬机之间,实现对输送带的巡检,如图6所示。
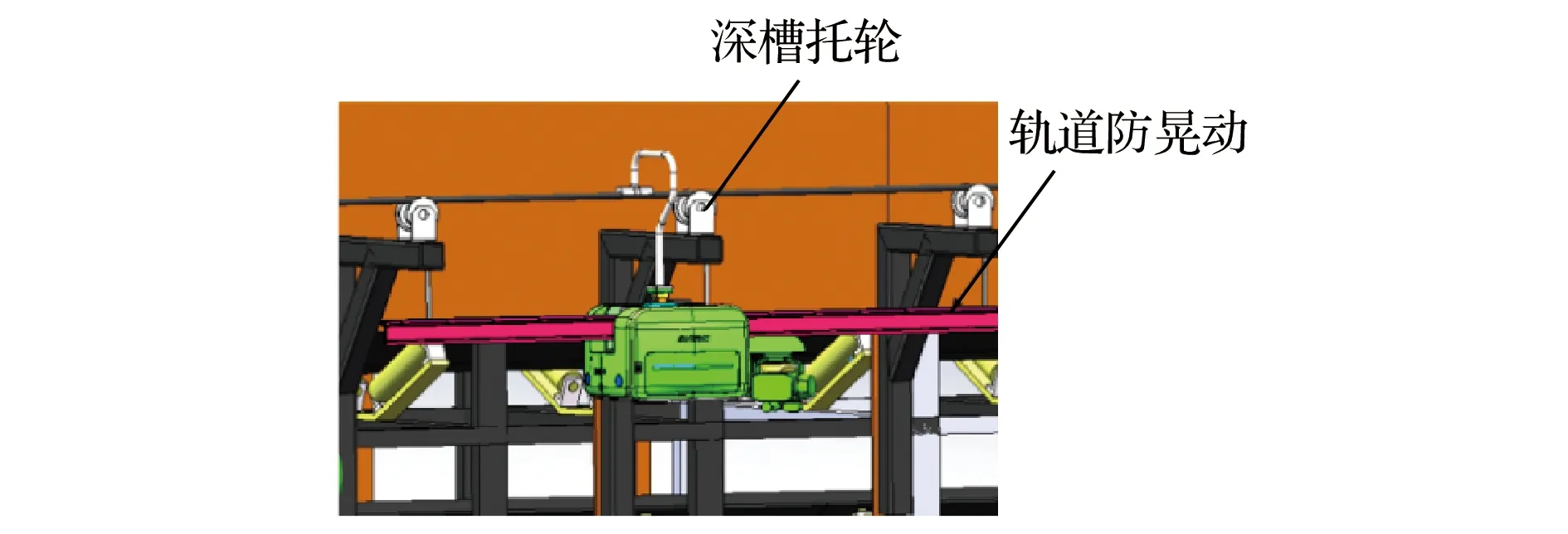
图6 吊绳式机器人安装
1.3 巡检机器人适用场景研究
1.3.1 吊轨式巡检机器人
吊轨式巡检机器人是现有煤矿广泛使用的一种机器人结构,在煤矿变电所、输送带等巡检场景都得到了应用。一般是采用工字钢或者铝型材作为机器人的行走轨道,吊轨式巡检机器人采用机器人搭载的主动驱动机构完成机器人的行驶。
优点:整体结构简单,仅需搭建工字钢轨道,并不需要额外配备驱动系统;轨道刚度高,机器人运行稳定性高,易于完成图像采集等高精度检测;轨道可以搭建环形、直角形等各种形状,缺点:电池容量需求较大,尤其是针对严寒环境,电池性能衰减严重,需要额外增加电池体积才能够满足续航要求;行驶机构的驱动能力有限,在户外寒冷状态,轨道经常会有积雪、积冰等情况,导致轨道轮打滑,无法完成巡检作业;轨道成本较高,长距离铺设的经济效益性低。
适用应用场景:煤矿井下变电所巡检、煤矿井下变电所巡检。
1.3.2 吊绳式巡检机器人
吊绳式机器人其工作原理是采用牵引式的行走方式,驱动机构采用卷扬机、矿用绞车等驱动机构,这种机器人在煤矿中目前应用较少,也仅有2家企业取得了安标认证。两种巡检机器人性能对比见表1。

表1 两种巡检机器人性能对比表
优点:机器人整体结构简单,运动可靠性高,不易出现问题;采用钢丝绳作为牵引的媒介,布设成本较低;驱动装置的驱动能力较强,能够克服积雪、积冰等情况;电池容量需求低,仅满足摄像头和传感器供电即可。
缺点:轨道刚性较低,运行过程中会有机器人晃动的问题;驱动装置占地面积较大,成本较高。
2 严寒环境下电池预热性能研究
电池是保证机器人稳定使用储能部件,电池的性能影响了机器人行驶距离、行驶速度等多项参数[15]。同时,煤矿机器人的储能装置一般是选用锂电池,低温对锂电池的性能影响较大,不仅会造成机器人续航距离变短,甚至导致机器人无法正常运行[16,17]。因此,本章节分别对锂电池的低温性能和预热低温性能展开研究,提出严寒环境的锂电池性能解决方案。
2.1 试验样品
该项目选用的电池为容量为600mA·h的锂电池作为实验对象,循环使用寿命大于1000h,正极采用钴酸锂,负极采用石墨。
2.2 试验设备
为了验证电池的低温性能,本项目采用型号为AWC2000的高低温试验箱作为实验设备,其最低测试温度能够达到-60℃,最高测试温度能够达到100℃,温升调节精度为2℃,能够满足本实验的实验要求。并在测试箱内引出多条连接线,用于与电池供电设备相连。电池的充放电机采用Arbin-BTS2000,能够实现对电池充放电的过程完成记录及动态采集。
2.3 无预热状态的电池放电性能测试
2.3.1 试验方法
电池充电温度选择恒温20℃充电,电池充电电压为0.2C,充电状态不进行监控,充满电后,调节恒温箱的温度,放电环境温度分别选择20℃、10℃、0℃、-10℃、-20℃等五档温度完成不同温度的测试,尤其是观测在低温状态的电池放电情况[18-20]。设备放电之前,需要在恒温箱中保温6h,电池放电电流选择为0.2C,放电截止电压为2.5V。
2.3.2 测试结果
不同测试温度的电池电压放电性能曲线如图7所示,不同温度的电池性能状态见表2。通过分析测试结果,能够得出,随着温度的降低,电池的放电容量呈现逐步下降的趋势,同时,在大于0℃以上,初始放电电压基本不变,基本保持在相对稳定的条件,随着测试温度的降低,初始放电电压呈现急剧下降的趋势。

图7 不同温度下电池放电性能

表2 不同温度的电池性能状态
在-2~20℃的测试区间内,以0.2C的放电电流完成实验的过程中,测试电池的容量分别为583.3、535.7、476.2、416.7、285.7 mA·h,分别占电池理论容量的97.2%、89.2%、79.4%、69.5%、47.6%。并且,在温度降低到-35℃以下时,电池无法正常使用。
通过分析表2数据能够得出,在电池低温过程中,当将温度恢复到常温状态,并不影响电池的充电容量,因此,低温造成的放电容量降低是可逆过程,并不造成电池的损坏。在低于-10℃的低温环境测试过程中,锂电池的容量及放电电压都呈现急剧下降的趋势,这是由于在寒冷的环境下,锂电池内芯的电导率下降,造成电化学极化增加,因此,随着温度的降低,电池容量、放电电压等重要性能参数均呈现下降趋势。
2.4 预热状态的电池放电性能测试
2.4.1 电池预热方法
为提高电池在低温环境的使用性能,对电池增加了预热功能,考虑到电池箱布置较为紧凑,需要考虑加热装置的稳定性和紧凑性,采用电加热膜作为电池的加热单元。电加热膜是一种柔软的加热介质,外部采用绝缘性能良好的材料表层膜,并通过高压压制工艺手段,将内部加热电阻丝压制在加热膜之间,具有导热均匀,使用安全,产品稳定性高等优点,将其布置在电池箱体的四周,能够对电池完成均匀预热。
2.4.2 电池保温方法
由于该项目设计的电池箱材料为Q235钢板焊接制成,其传热性较快,为了起到对预热电池的保温作用,需要将电池箱作保温处理。通过考察现有的保温材料,由于机器人的布置较为紧凑,电池箱内部空间有限,因此,选择合理的保温材料需要兼顾隔热性和紧凑性,项目选择的保温材料为一种特制的隔热涂层材料,导热系数为0.03W/(m·K),具有良好的隔热性能,其将这种材料涂抹在箱体上,涂抹厚度为5mm。
2.4.3 试验方法
电池充电温度选择恒温20℃充电,电池充电电压为0.2C,充电状态不进行监控,充满电后,调节恒温箱的温度,放电环境温度分别选择20℃、10℃、0℃、-10℃、-20℃等五档温度完成不同温度的测试,设备放电之前,需要在恒温箱中保温6h,然后,对电池箱内部完成预热,将电池加热到20℃,停止加热,并对电池完成电池放电测试,放电电流选择为0.2C,放电截止电压为2.5V。
2.4.4 测试结果
环境温度为-20℃时,电池预热及降温如图8所示,电池预热时间为708s,预热完成之后,电池经过2167s完成降温,之后,电池箱体内部和外部的温度基本相同,可以看到,在严寒情况下,电池箱的预热及保温性能具有良好的效果,在前期能够工作于较为适宜的温度下,能够提高电池的使用性能。

图8 电池预热及降温曲线
在电池预热状态下,不同测试温度的电池电压放电曲线如图9所示,预热状态下的电池性能状态见表3。通过分析测试结果,能够得出,虽然环境温度不同,但是由于电池的预热温度均为20℃,因此,电池的初始放电电压基本相同,随着温度的降低及放电的逐渐进行,各电池供电电压呈逐步下降的趋势,到达截止电压时,完成测试。
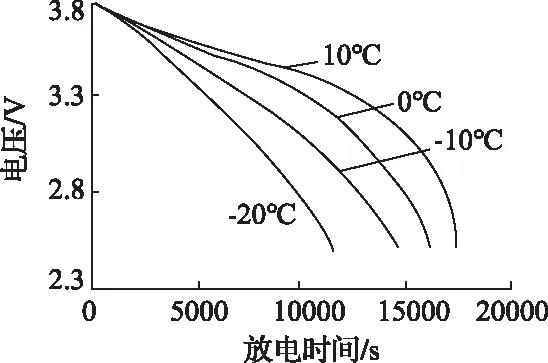
图9 预热状态下的电池放电性能

表3 预热状态下的电池性能状态
在-20~10℃的测试区间内,将电池预热到20℃之后,以0.2C的放电电流完成实验的过程中,测试电池的容量分别为571.4mA·h、523.8mA·h、488.1mA·h、381mA·h,分别占电池理论容量的95.2%、87.3%、81.4%、63.5%、47.6%。通过对比非预热状态和预热状态的电池容量,能够得出电池在放电电压、放电容量都有着显著的提升,其中,-20℃的放电容量提升了33.4%,-10℃的放电容量提升了17%,对于保证巡检机器人在严寒工况下的稳定运行具有重要的意义。
3 结 论
本文对严寒环境下露天矿带式输送机巡检机器人的结构及工作原理进行了阐述,针对吊轨式及吊绳式的巡检机器人在严寒露天矿的应用场景的优缺点及设计方案进行分析,讨论这两个机器人的适用性,确定露天煤矿长距离输送带巡检宜采用吊绳式巡检机器人,具有续航里程长、驱动能力高、运行稳定性高等优点。之后,采用实验室的高低温试验箱完成不同环境温度下的锂电池放电性能研究,尤其重点考察低温条件下的锂电池性能,实验结果表明,随着温度的降低,电池的放电容量及初始电压均呈现逐步下降的趋势,在温度降低到-35℃以下时,电池无法正常使用。为解决严寒环境巡检机器人电池续航难题,提出电池预热保温解决方案,并完成预热状态下的电池不同温度的放电性能测试研究,实验结果表明,预热状态的电池容量、放电电压都有着显著的提升。
猜你喜欢
今日农业(2022年14期)2022-09-15
军事文摘(2022年14期)2022-08-26
发明与创新·小学生(2020年4期)2020-08-14
中学生数理化·中考版(2016年10期)2016-12-22
发明与创新·小学生(2016年4期)2016-08-04
摄影世界(2015年11期)2015-11-12
微电脑世界(2009年12期)2009-12-31
物理教学探讨(2009年12期)2009-06-02
网友世界(2009年4期)2009-03-02
儿童时代·快乐苗苗(2009年12期)2009-01-20