
分布式多轮电驱动车辆回馈制动控制策略研究
2022-05-12 09:41张志坚朱学斌孙亚男禹东方李争争
机电工程技术 2022年4期
张志坚,朱学斌,李 静,孙亚男,禹东方,李争争
(泰安航天特种车有限公司,山东泰安 271000)
0 引言
全电特种车辆是一种可以装配电炮系统、电装甲系统的且将战场管理系统、火控系统和防护系统等作为节点搭接在综合信息网络系统中的,同时连接“顶层”战术网络的特种车辆。这种全电特种车辆是以电传动和全电化为基础的,能够与其他陆地与空中平台组成一个网络作战系统,进行协同作战,从而成倍的增强其战斗力[1-3]。分布式多轮电驱动特种车辆多数是一种并联式能量互补形式,可以分别由柴油机发电系统和高功率型磷酸铁锂动力电池同时或者分别为整车提供能量从而驱动车辆行驶,由于采用的是电驱动,所以能够省去一些结构复杂、重量大且空间占比较大的机械件,布置也趋向灵活简单化[4]。国外,尤其是西方国家,在上世纪末期提出了以电驱动、电炮、电装甲为典型特征的“全电化坦克”概念,并设想以“通用平台+任务模块”的模式构建新型作战系统。国外相关的特种车企业,例如美国AHED、瑞典SEP、南非CVED等已经研发出相应的一体式全电动驱动车辆[5-8];目前国内在电驱动车的电机驱动系统方面也做了很多验证性研究,其中清华大学杜荣华等[9]对分布式电驱动汽车的电驱动系统进行了研究,提出了一种电动汽车以路面附着为基础的再生制动与液压制动ABS共同作用协调的控制方法;北京理工大学孙晓坤[10]则以快速原型开发平台和自动代码生成技术为基础,搭建了分布式驱动系统的通信网络的软硬件平台,以此展开对电驱车电机驱动系统的研究。目前国内高校研究仅处于理论模型阶段,因此,公司设计了6×6分布式轮毂电机驱动电动装甲车,为分布式驱动车辆各个功能控制算法提供可以验证其可靠性和正确性的试验车辆。
本文主要通过对6×6分布式电驱车辆驱动系统工作特点的分析,根据驾驶员的操控意图,对整车多轮分布式电驱动系统的制动能量回收进行了研究。分析了车辆在不同行驶工况下,制动能量回收所采用的不同的控制方式,从而达到车辆全地形操控的目的,为后续特种电动车辆在电驱动系统的研究奠定基础。
1 再生制动理论分析
1.1 电动汽车再生制动原理
电驱动汽车的制动性顾名思义是指汽车行驶过程中在短距离内停车且能够维持行驶方向稳定性和在下长坡过程中能够维持一定车速的能力[11]。再生制动又称再生回馈制动,工作原理是在驾驶员踩制动踏板时,汽车行驶惯性产生的能量通过传动系统给到驱动电机,此时驱动电机控制器会给驱动电机一个负扭矩,驱动电机作为发电机进行工作,使驱动电机转子轴上的动能转变为电能,通过电机控制器中的逆变器的反向二极管回流到直流侧,从而给动力电池进行充电,实现制动能量的回馈利用[12]。同时产生的驱动电机反向扭矩又可以通过传动系统对驱动轮施加制动力,与机械制动共同作用达到刹车效果。这样不仅会使制动器的负担减小,而且可以通过能量的双向流动达到节能减排的目的。
再生制动系统制动力分配一般分为叠加式和协调式。叠加式顾名思义是将电机的回馈制动力直接在原本的摩擦制动力上进行叠加;协调式是优先使用电机制动力,同时调节摩擦制动力,是两者制动力在满足车辆总体制动力需求的情况下进行合理分配[13]。本文采用的是基于协调式的再生制动控制策略,在车辆进行制动时,驾驶员通过踩踏制动踏板然后获得所需的制动扭矩,此时如果再生制动扭矩满足整车所需要的制动力,则摩擦制动不参与;如果再生制动扭矩无法满足整车所需要的制动力,则不足的部分需要摩擦制动进行补偿。
1.2 6×6分布式电驱车辆回馈制动工作原理
车辆采用混合动力轮毂电机驱动方式,6个车轮分别由对应的6个轮毂电机驱动,每个电机均可独立控制。按动力模式可分为混合动力驱动即发动机-发电机和电池共同供电、电池单独驱动和发动机-发电机单独驱动3种模式。按制动方式,可分为再生制动、再生制动+能耗制动、再生制动+能耗制动+机械制动、机械驻车制动等4种制动模式。图1所示为分布式电驱车辆总体架构。
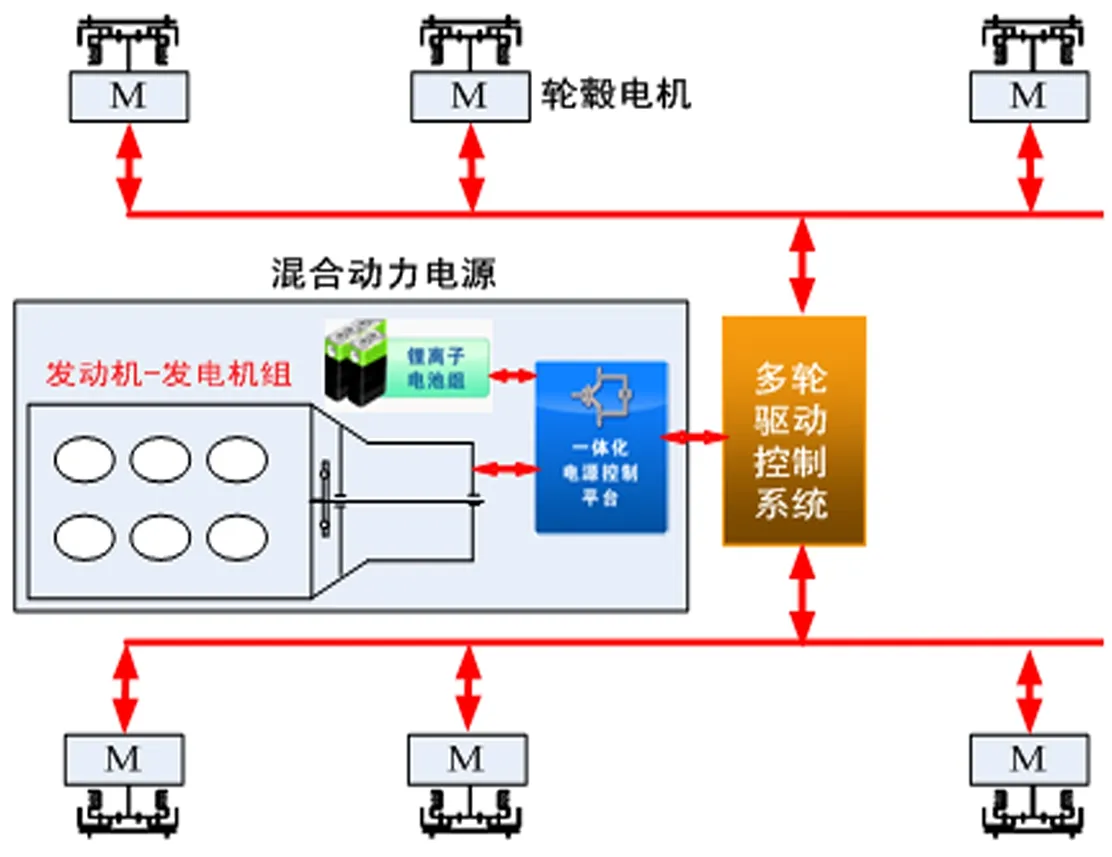
图1 分布式电驱车辆总体架构
该型号分布式电驱车辆在一般行驶工况时,动力由输出功率为405 kW发动机输出、经增速机增速降扭后驱动一台400 kW三相永磁同步发电机、可以产生530 V三相交流电;交流电经过一体化电源控制平台整流为750 V直流电、而后与750 V、60 Ah动力蓄电池共同向110 kW电机集成驱动控制器提供直流电;电机集成驱动控制器将直流电逆变为可控的交流电分别驱动6个轮毂电机;6个轮毂电机通过减速器将动力传递给对应的车轮。通过独立控制轮毂电机的驱动和制动转矩,可以实现车辆加速、制动、转向、滑行等各工况下的高机动行驶性能,并能有效地吸收再生制动能量。车辆制动时具有电机再生制动、制动电阻能耗制动和机械制动等多种模式,满足车辆正常行驶回馈制动、下长坡制动、高速紧急制动和驻车制动等多种工况要求。
2 整车电制动控制策略
该三轴车辆有3种驱动型式:6×6、6×4、6×2,整车控制器会根据不同的驱动形式,输出不同扭矩命令值,单轮扭矩命令值受限于轮毂电机的峰值扭矩,表1所示为轮毂电机和动力电池的参数。
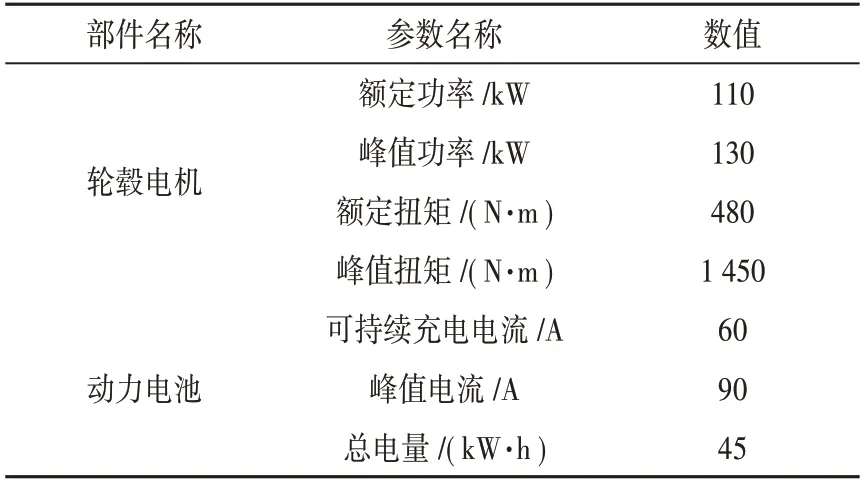
表1 轮毂电机和动力电池参数表
整车控制系统根据车辆实际使用工况分为滑行制动方式、机电混合制动方式和长坡行驶能量回馈+能耗制动方式。本文主要研究电制动的工作情况。
电机根据转速不同可以分为恒转矩区域和恒功率区域,电机限制下的轮毂制动力如下:


式中:Fmmax为电机能够提供的最大再生制动力;n为电机的转速;Tmax为电机最大转矩;PN为电机额定功率;r为车轮半径;N为电机额定转速;ig为变速器传动比;i0为主减速器传动比。
电池限制下的最大功率为:

电池最大充电功率限制下的最大电机制动力为:

式中:Imax为电池最大充电电流;Umax为电池的最大充电电压;R为电池内阻;Voc为电池的端电压。
电制动的制动能量主要与动力电池的剩余荷电量、车速、驾驶员意图即制动踏板开度、动力电池的最大充电电流以及电机转速有关。而该电驱动特种车辆电制动原则是整个车辆系统制动系统产生的回馈能量回收效率受限于当前整车动力电池的剩余电量SOC,车辆在进行制动时,动力电池能量管理系统将动力电池的SOC值发送给整车控制器,整车控制器对剩余荷电量SOC进行判断:当剩余荷电量大于0.8时,不允许进行电制动即取消制动能量回收,整车控制发送给电机控制器的电制动扭矩为0;当剩余荷电量小于0.8时,允许进行电制动,且制动能量回收受动力电池允许的最大充电电流、车速、制动踏板开度及电机转速的制约。
根据分析,整车电制动能量回收过程中会受到很多电气部件与机械部件限制,其中电机制动扭矩和电池吸收能量的限制最为重要。电机最大再生制动力越大,在制动力分配时电机制动力占的比例越大,回收的再生制动能量也就越多。
电驱动特种车辆在行驶过程中有很多的行驶工况,此时仅依靠电制动是不可行的,需要电制动和机械制动进行协调作用。车速是影响电制动和机械制动分配的关键因素,该电驱动特种车辆在电制动和机械制动协调配合时的分配原则:当车辆行驶车速在60 km/h及以上时,为了保护机械制动器,只让驱动电机参与制动,而机械制动不参与工作;当车辆行驶车速在60~5 km/h范围内时,电制动和机械制动均参与工作,电制动以允许的最大的制动强度进行工作,而制动踏板行程中电制动行程除外的剩余的部分行程对应的制动力全部由机械制动承担;当车辆行驶车速低于一定车速时,电制动几乎不参与工作,此时制动踏板行程对应的的制动力全部由机械制动承担。如图2所示为整车电制动控制流程。
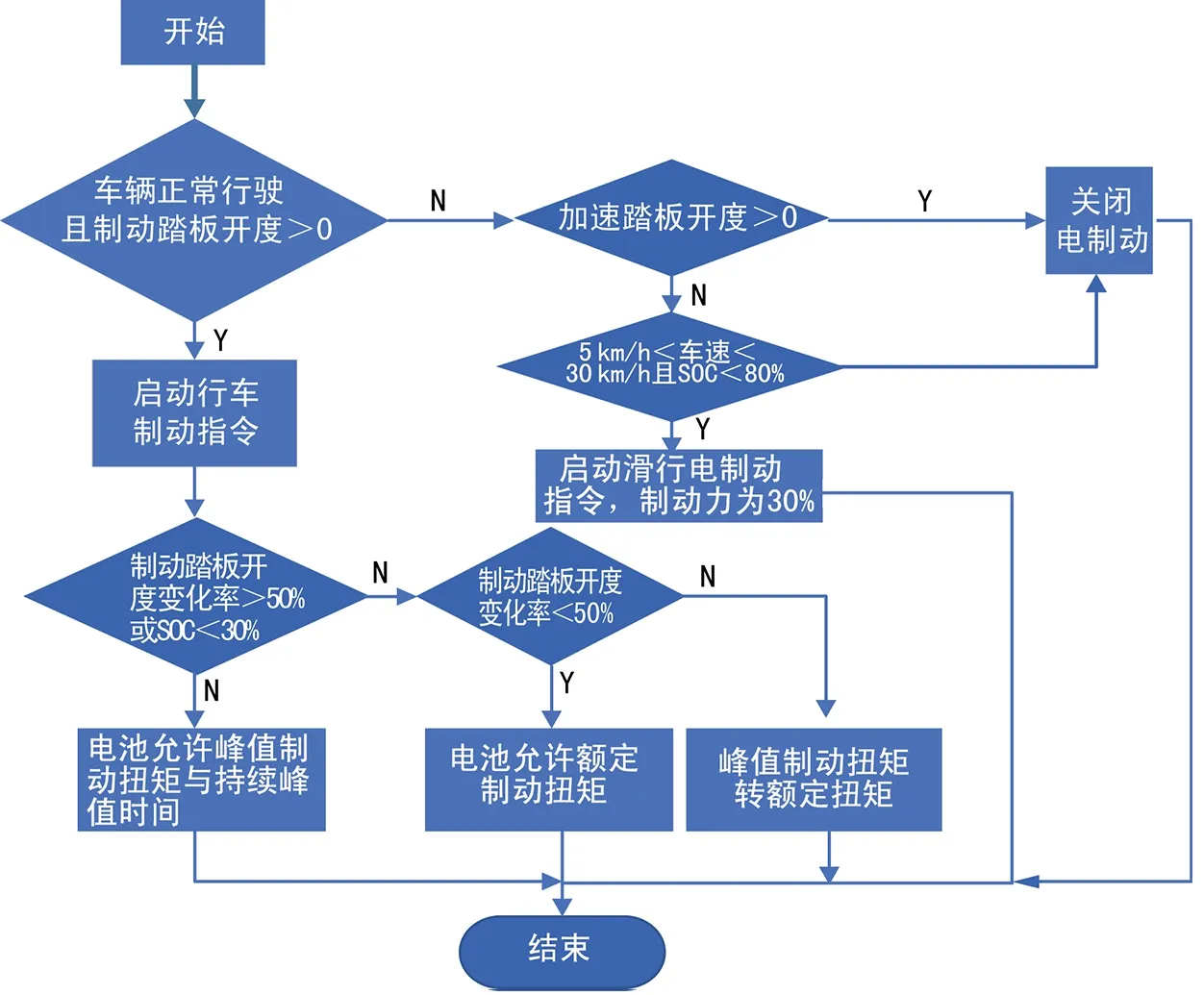
图2 整车电制动控制流程
3 整车电制动建模仿真与实验分析
根据上一章整车电制动控制策略的要求,在Matlab中搭建了整车驱动系统控制模型,使用SIMULINK和State flow状态机进行控制逻辑创建,图3所示为整车驱动系统控制模型。
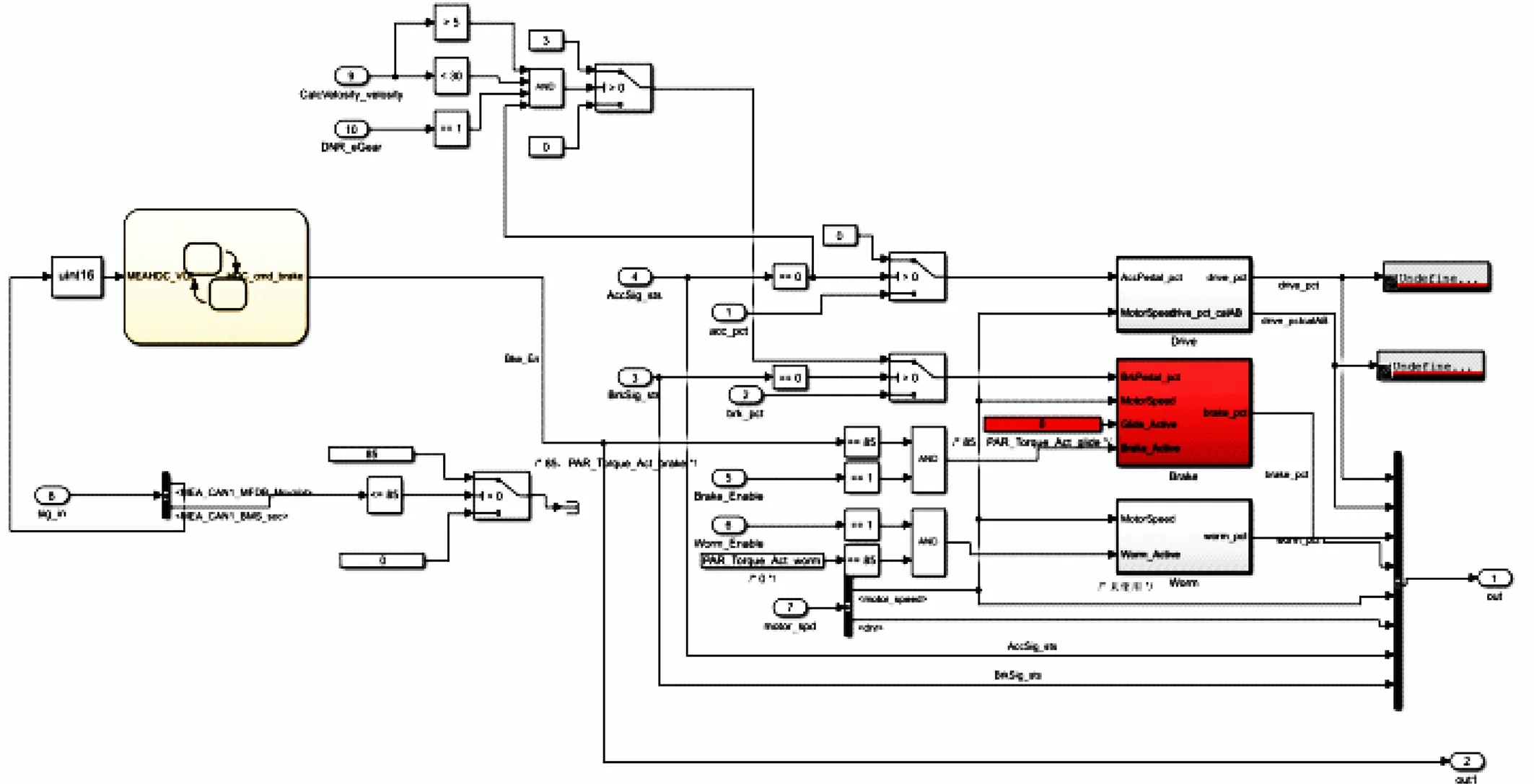
图3 整车驱动系统控制模型
图4所示为制动系统模型,电驱车辆制动扭矩输出根据当前驾驶员制动踏板开度和电机转速查表获得,图5所示为制动扭矩控制规则,制动扭矩分配表的制表根据电池输入功率和电机本体的外特性曲线得来,根据机械制动和电制动结合,符合整车制动距离的要求。
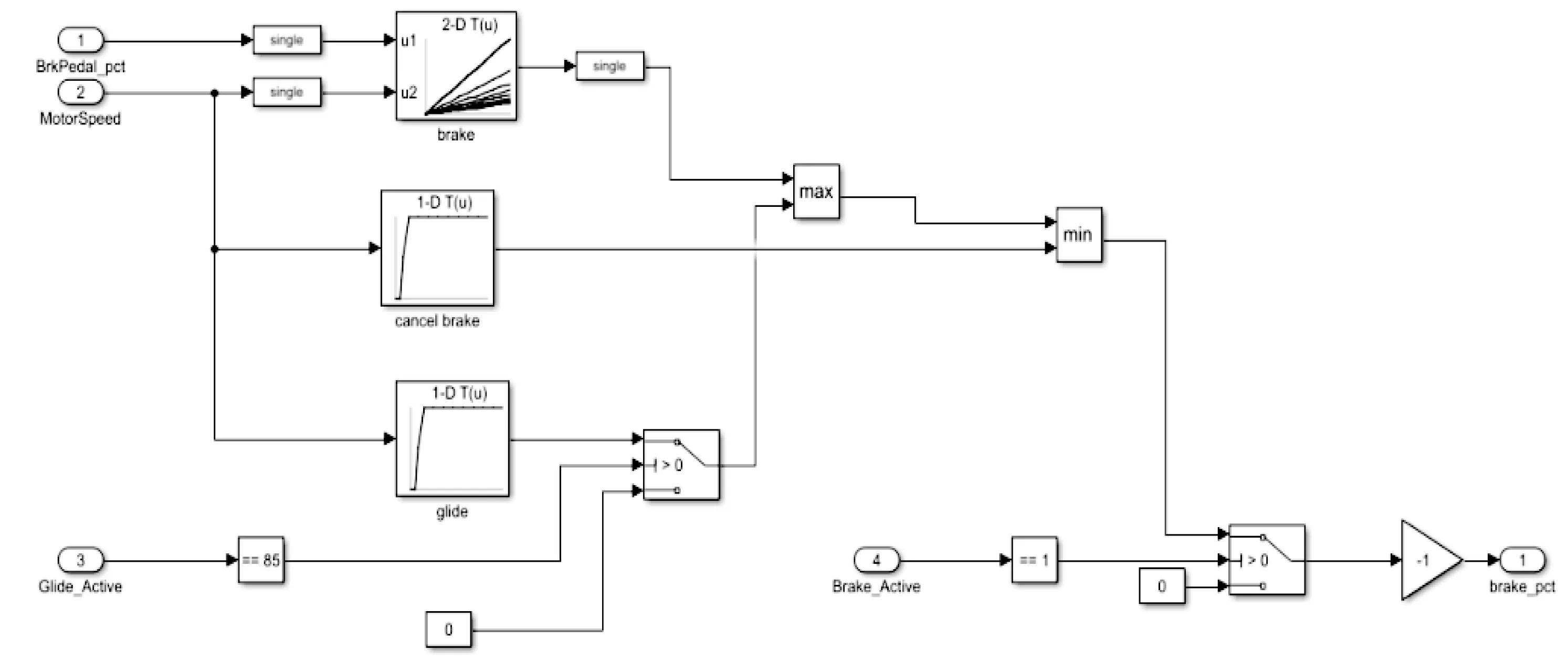
图4 制动系统模型
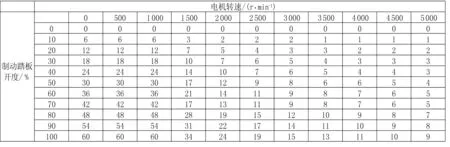
图5 制动扭矩控制规则
使用Test Harnesses进行仿真测试,进行同一转速下,制动踏板不同开度和同一开度,不同转速下,电机控制器回馈的能量仿真。图6所示为制动能量回收测试仿真图。分析可知:制动踏板开度以10%为递进数值,从制动开度0到100%情况下,电机转速为从0 r/min到5 000 r/min下,产生不同制动功率,图中数值显示的是转速在2 000 r/min情况下,电机制动回馈的电功率依次为12.6 kW到72 kW,均在电池允许的充电功率范围内。
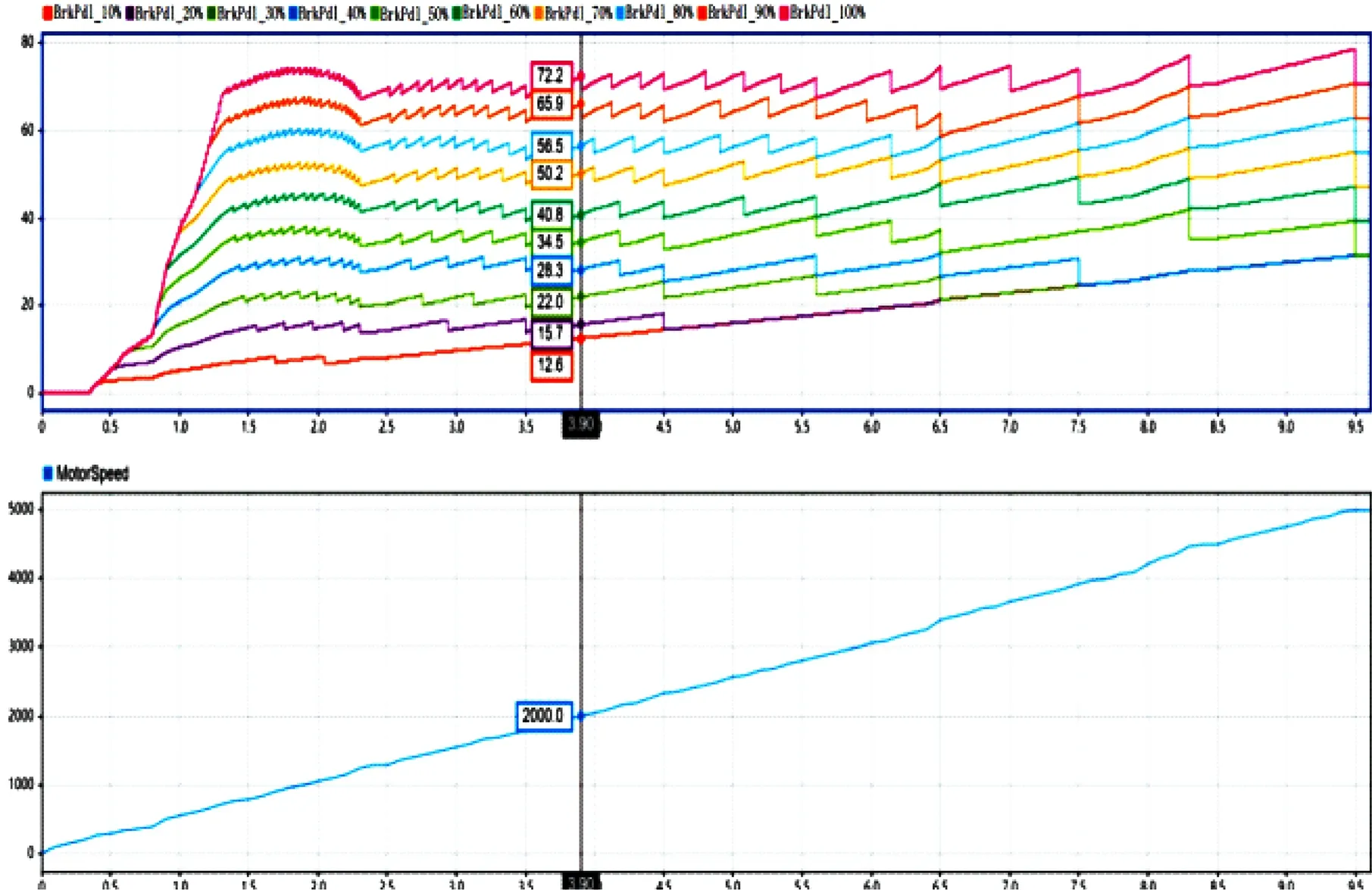
图6 制动能量回收测试仿真
将搭建的整车电驱动控制模型通过快速原型开发平台和自动代码生成技术将源代码烧录到整车控制器中,并在该6×6电驱动特种车上进行实车测试。试验测试图如图7所示。分析可知:6×6分布式电驱车辆在某山区进行了越野路面下坡电制动能量回收试验,在车辆速度为60 km/h时,进行了40%电制动测试,瞬间回馈电流达到20 A以上的电流,车速在电制动和机械制动同时作用下,可以起到刹车制动效果。
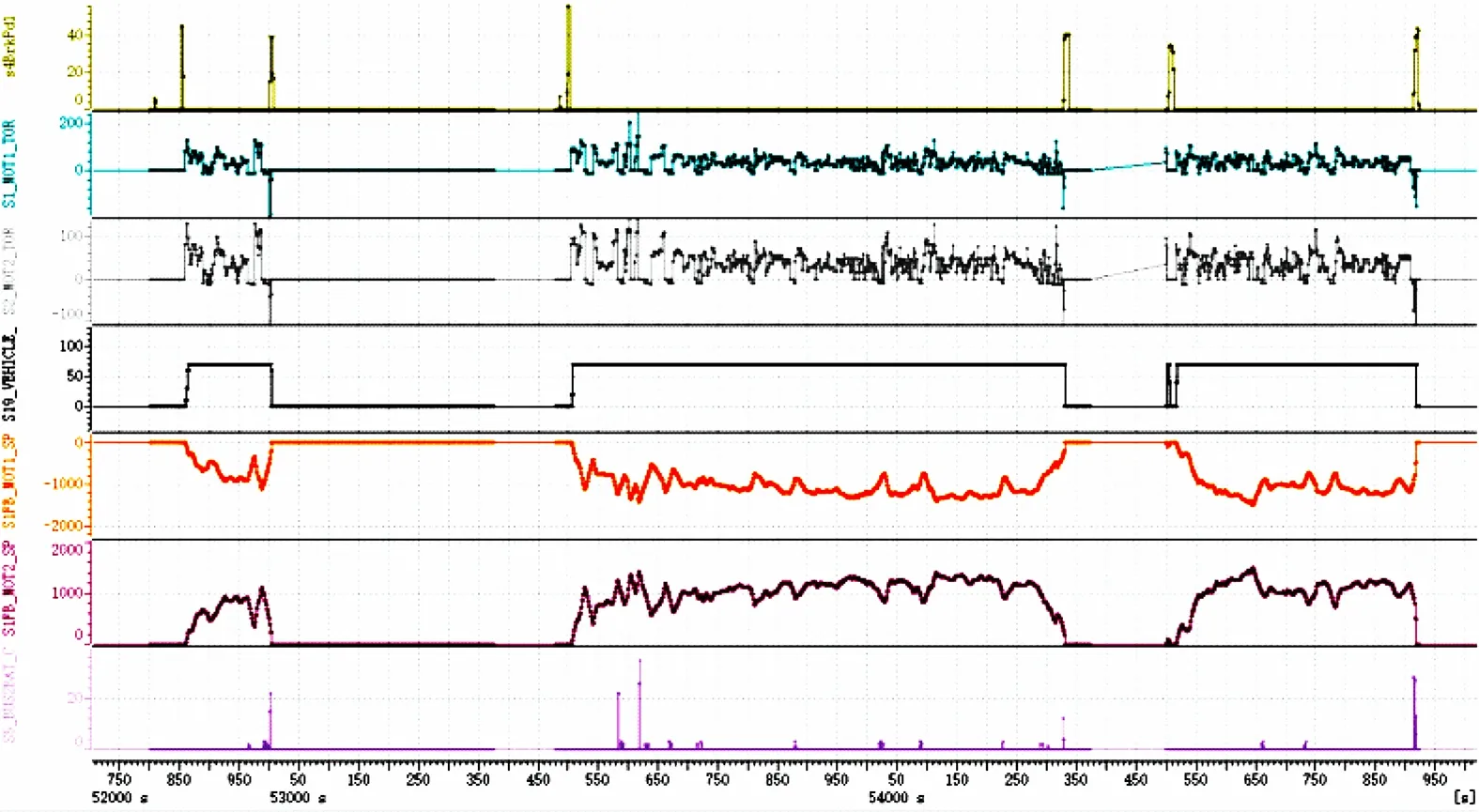
图7 实车测试试验数据
4 结束语
(1)多轮分布式电驱动特种车辆在进行电制动能量回收过程中将会有多因素的制约,这些因素包括动力电池的剩余荷电量、车速、驾驶员意图即制动踏板开度、动力电池的最大充电电流以及电机转速。其中电机的允许的最大制动强度、动力电池的剩余荷电量和允许的最大充电电流是最关键的因素。
(2)单一的电制动和机械制动都无法使车辆的制动效果达到最优,需要将电制动和机械制动进行协调配合,其中协调控制策略尤为重要,本文分析为后续分布式电驱动特种车辆制动能量回收策略的研究奠定基础。
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年2期)2022-02-21
商品与质量(2020年41期)2020-11-09
北京汽车(2018年5期)2018-11-07
消费导刊(2018年10期)2018-08-20
汽车与新动力(2018年2期)2018-05-09
三联生活周刊(2016年22期)2016-05-27
兵器装备工程学报(2015年4期)2015-07-01
客车技术与研究(2014年1期)2014-03-20
