自动驾驶的定位大法
2022-05-12 20:25李琳
汽车观察 2022年4期
李琳
云贯玉衡COO朱鸿认为,准确、安全、高效的“高精定位系统”的发展将会加快汽车产业智能化转型的进度,促进智能驾驶时代早日到来。
自动驾驶、智慧出行已被公认为汽车出行产业的未来方向。算法的迭代、纯视觉路线与多传感器融合路线成为自动驾驶产业发展过程中玩家们争论的焦点,而在感知端发挥重要作用的高精定位引擎虽然争论较少,却在自动驾驶实现过程中发挥着重要作用。
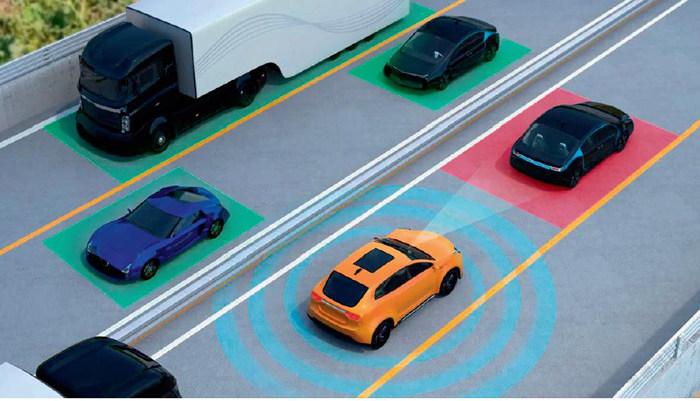
在完成自动驾驶任务的过程中,车辆需要掌握如下几个信息:我在哪(定位);我要到哪(规划);我如何到那(导航规划);我要避免碰撞(感知);我要遵守规则(理解建模)。高精定位系统参与了自动驾驶汽车感知、决策的过程,咖位可见一斑。
云贯玉衡科技有限公司就是将GNSS与IMU传感器相结合,进行多源融合定位技术创新的初创企业。目前云贯玉衡所推出的iGNSS Auto产品可以面向各类车型提供智能定位导航增值服务,这一方案也被《麻省理工科技评论》评定为2021年全球十大突破性技术。
iGNSS Auto让定位“零误差”
当前,汽车产业内使用较为广泛的高精定位技术为实时动态定位系统(RTK)。RTK技术对密集的基准站资源依赖较大,当个别基准站出现故障或数据异常时,服务区内的用户定位精度就会下降。在这些特殊情况下,惯性测量装置 (IMU)就可以协助车辆进行自主导航RTK的工作原理,就是地面基准站(如移动布局的4G基站)不断接收全球导航卫星系统(GNSS)信号,基准站将卫星定位结果与与已有精确坐标对比,计算出该区域卫星定位的综合误差。基准站将误差数据发送给附近的流动终端(即车上的RTK接收天线)。流动站收到误差数据,矫正自身定位结果,实现厘米至亚米级定位精度。而在移动网络无法覆盖的区域,如天桥、隧道、地下停车场等场所收取不到GNSS卫星信号时,RTK就无法进行精准定位。
IMU组成的惯性导航系统,可以根据当前的位置、前进的速度,方向和角度,自己建立一个坐标系,算出一个预估的位置,输出给导航地图一个经纬度位置,实现自主导航。值得注意的是,依靠预估进行定位的IMU系统在定位过程中会存在误差,且距离越远,误差越大,但通过技术突破,云贯玉衡的IMU系统已经避免了误差的存在。
云贯玉衡COO朱鸿表示:“传统的IMU会出现累积误差,但iGNSS Auto提供的是绝对位置定位,不存在误差,这是我们独有的竞争力。”根据朱鸿描述,即使在没有任何GNSS信号的情况下,iGNSS Auto的IMU传感器也可以指导车辆连续永久行驶。
除了对卫星信号依赖较强外,传统的RTK技术需要上报移动运营商平台,这就造成了用户隐私的泄露。出于保护用户隐私的目的,云贯玉衡采用了PPP-RTK技术。PPP-RTK通过对基站数据进行综合估计和建模,生成一套包含卫星钟差、轨道误差、区域电离层误差等的状态改正量,发送至流动站进行位置解算。
“PPP-RTK技术也是云贯玉衡相对于与国内竞品的一大优势。iGNSS Auto由RTK和IMU两部分组成,但这两部分都不需要获取用户位置,对用户隐私保护水平已经比肩外企巨头。”朱鸿补充道。
内功与外力皆不可少
通过iGNSS Auto的产品力,可以发现我国高精定位初创企业的核心競争力已经非常强悍,但高精定位产业的发展速度想要更上一层楼,不仅需要服务商练好内功,还需要整个产业提供帮助,形成合力。
良好的政策环境,是助力高精定位企业成长的东风。2022年1月28日,工业和信息化部正式发布《关于大众消费领域北斗推广应用的若干意见》,其中明确指出扩大车载终端北斗应用规模。鼓励车辆标配化前装北斗终端,提升北斗在车辆应用的渗透率。探索车辆北斗定位+短报文+4G/5G的一键紧急救援模式,鼓励有条件的地区、车企、服务商先试先行。
但在朱鸿看来,在政策铺路搭桥的同时,高精定位产业的发展还需要图商、车企等参与者的共同助力。
定位导航分为两部分,一部分是高精定位引擎,另一部分则是地图。定位做得再精准,如果没有地图,车辆也无法知道自己所处的位置。“但目前在地下停车场和其他室内场所,地图还是很少。”朱鸿表示,“地图厂商目前也在完善室内外一体化方案,如果他们能够进一步加快落实方案,双方尽快实现配合,对我们产品的推广起到直接推动作用。”
此外,高精定位产业的发展还需要车企的推广。“在自动驾驶技术与高级辅助驾驶技术的推广方面,传统车企比较保守,造车新势力车企虽然比较激进,但销量有限。这也一定程度影响了对高精定位产品的推广。”在朱鸿看来,拥有高级辅助驾驶技术的车企如果能够尽早向消费者提供一体化方案,将会推动高精定位产业的发展。
“伴随着汽车智能化水平的不断推进,0.1%的定位失效率都可能造成高级辅助驾驶事故的发生。准确、安全、高效的‘高精定位系统’的发展将会加快汽车产业智能化转型的进度,促进智能驾驶时代的早日到来。”朱鸿总结道。
猜你喜欢
卫星应用(2022年3期)2022-05-23
大众科学(2020年8期)2020-11-02
环球时报(2020-03-10)2020-03-10
四川党的建设(2018年20期)2018-11-02
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
杂文选刊(2018年1期)2018-01-09
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
海峡科学(2013年3期)2013-10-21