
一种基于行星轮系的翻转机构设计*
2022-05-11 06:03:34谭鸿俊汤迎红
科技与创新 2022年9期
谭鸿俊,汤迎红
(湖南工业大学科技学院,湖南 株洲 412007)
1 背景
近几年,翻转机构的应用越来越广泛,市面上大部分使用的都是大型翻转机构,但对于一些尺寸、体积较小的物体的翻转,还需要小型翻转机构。文献[1]设计了一款应用于自动化生产线上的翻转机构,实现了物体在2个水平输送带上的传递,并且从原来的竖直状态变成水平状态。翻转机构位于2个水平输送带之间,采用差动轮系传动。为提高效率,差动轮系四周均装有夹紧机构,夹紧机构在翻转1周的过程中同时自转1周,实现4个物体的位置切换,但该文献所涉及的轮系计算、结构设计介绍不是很完善。本文在文献[1]的基础上进行了改进,设计了一款基于行星轮系的翻转机构,相比于差动轮系,只有1个自由度,机构更简单合理,适合包装线、快递包裹线上等小型件的翻转。
2 整机设计布局
为实现物体在2个水平输送带上的传递,同时实现物体从竖直状态切换为水平状态,参照文献[1],翻转机构的设计布局如图1所示。
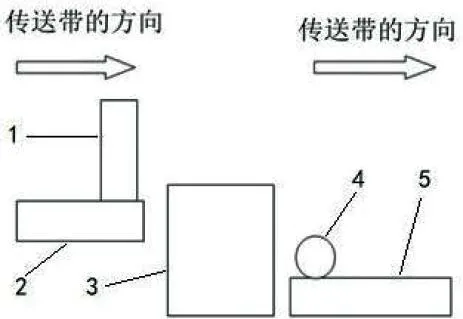
图1 翻转机构的布局
3 行星轮系设计计算
本文设计的翻转机构的主体是行星轮系,如图2所示。该行星轮系包括太阳轮1、太阳轮3、上下两平面的行星轮2、行星轮2′以及行星架H。太阳轮1固定不动,行星架H或者太阳轮3是该轮系的输入构件,行星轮2和2′是该轮系的输出构件。根据行星轮系安装条件,要求Z1=Z3且Z2=2′Z。
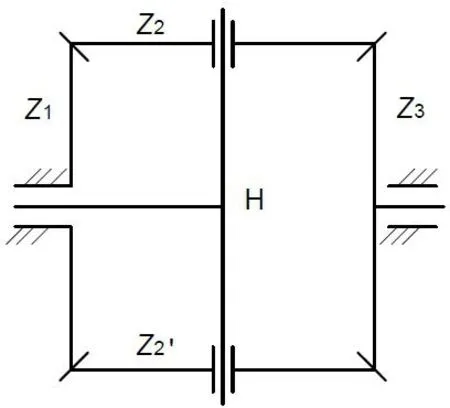
图2 翻转机构的主体
计算行星轮系传动比不同于定轴轮系,由于行星轮系运转时的轴线并不像定轴轮系那样是相对于机架固定的,而是绕着某一固定轴线运转,因此在计算行星轮系传动比时需要为整个轮系赋予一个公共角速度“-ωH”,根据相对运动原理的知识,此时转动的行星架H的角速度变为“ωH-ωH=0”,在这个转化过程中相对运动没有发生变化。此时,原周转轮系的转化轮系为一定轴轮系,其传动比便可以采用定轴轮系的知识来进行计算。由文献[2]可知,周转轮系的传动比计算公式为:
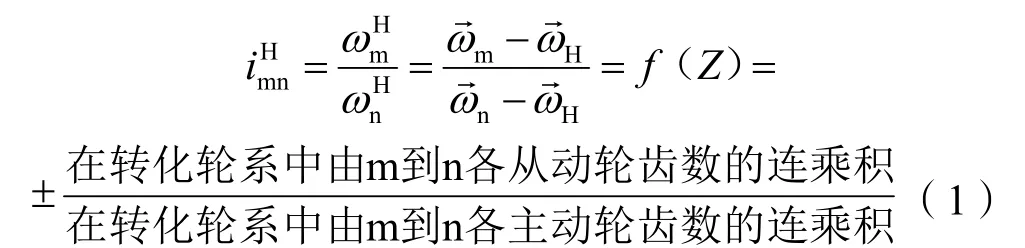
若齿轮m、齿轮n和行星架H回转轴线平行或者重合,即3个旋转矢量的方向一致时,矢量和数值上等于代数和,即
图2中,齿轮1、齿轮3和行星架H这3个构件的轴线共线,因此
图2中,齿轮1固定不动,即ω1=0,得到ω3=2ωH,即行星架转2周,中心轮3转1周。
若齿轮m、齿轮n和行星架H三者回转轴线既不平行也不重合,即3个旋转矢量的方向不一致时,矢量和不等于代数和,即
图2中,齿轮1、齿轮2和行星架H3个构件轴线既不平行也不共线,因此
行星轮2的绝对角速度ω2包括2部分,即牵连角速度ωH(行星轮2随行星架H的公转)和相对角速度(行星轮2相对行星架H的自转),如图3所示。
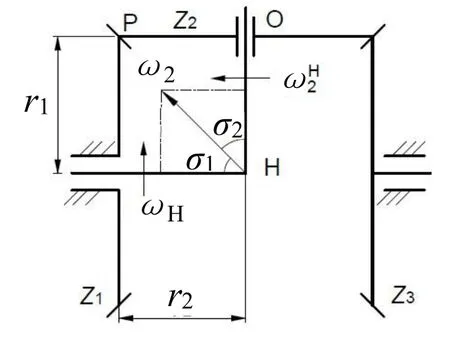
图3 行星轮系的传动比计算简图
图3中,P点为齿轮1和齿轮2的绝对瞬心,因此齿轮2在O点的速度为。行星架H在O 点速度为vHO=r1ωH。
因为O点为齿轮2和行星架H两构件的速度瞬心,因此vHO=v2O,即,得到
当r1=r2,即Z1=Z2时,δ1=δ2=45°,即行星齿轮2的自转速度H2ω等于公转速度ωH。
r1=r2,Z1=Z2,Z1=Z3,Z2=Z2′,因此要实现行星齿轮2公转1周的同时自转1周,须满足Z1=Z2=Z2′=Z3。
4 翻转机构设计
含4个行星轮的行星轮系如图4所示。为提高效率,避免干涉,在图2所示的行星轮系中增加了另一组行星轮系,包括太阳轮1′(和太阳轮1共轴,固定不动)、太阳轮3′(和太阳轮3共轴),前后端面的2个联动行星轮4和4′(图4中未画出),2组行星轮系共用十字行星架H,且Z1=Z2=Z2′=Z3,Z1′=Z3′=Z4′=Z4,4个行星轮公转1周的同时自转1周,三维模型如图5所示。
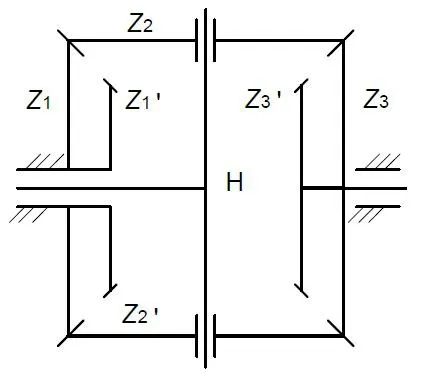
图4 含4个行星轮的行星轮系
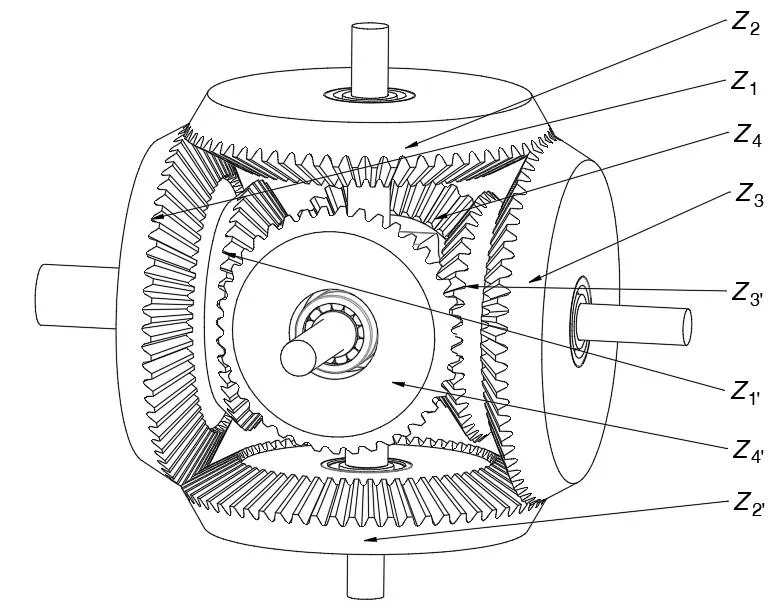
图5 2组行星轮系三维模型
设计中取Z1=Z2=Z2′=Z3=60,Z4=Z4′=Z1′=Z3′=40,输入n3=100 r/min,则nH=50 r/min,可以达到每分钟翻转200个物体的要求。
5 夹持机构的设计
4个夹持机械手分别与4个行星轮共轴固结,实现1个翻转周期内4个物体的翻转,提高翻转工作效率。夹持机构借鉴了滑槽杠杆式手部结构原理[3],如图6所示。这种手部具有结构简单、动作灵活、手指闭合角度大等特点,也可以根据被加持物的形状更换手指。但是考虑到气缸作为动力更加干净、灵活。本设计采用2个气缸作为驱动,1个气缸控制夹持机构的伸缩,1个气缸控制夹持物体。
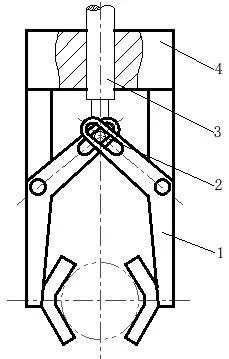
图6 滑槽杠杆式手部结构
由于机械手与输送带呈垂直分布,如果夹紧时直接翻转的话,机械手与输送带之间会有干涉,因此此时的工艺动作设计为:翻转机构停止→机械手伸出→机械手夹紧→机械手缩回→翻转机构继续旋转。夹紧机构工作时气缸控制滑块带着机械手整体向前伸出,气缸控制齿条使齿轮机械手抓紧物体,在伸缩和抓放的过程中利用步进电机进行停顿,以避免机械手和物体及皮带干涉,再将物体送至另一个传送带,后续的机械手再进入该工位以同样的过程进行工作。
6 主要零部件设计选型
要将物料夹紧,所以采用能间歇控制的电机,又因为所需转速不高,所以选用步进电机,本设计步进电机的型号为86BYG250AS-SAFSBL-0601,主要参数如表1所示。
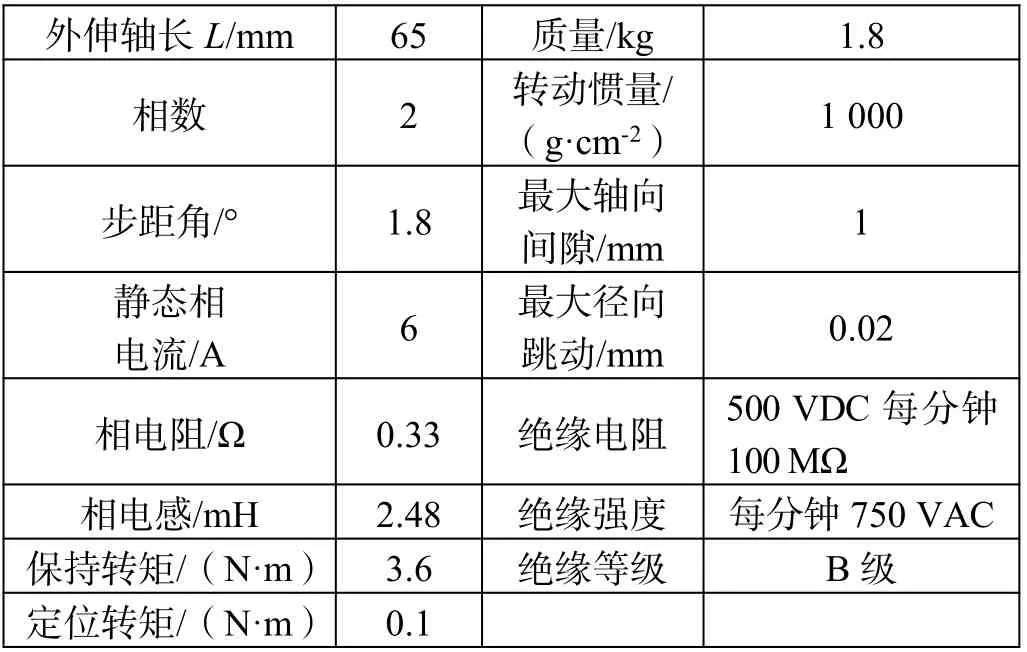
表1 步进电机型号与参数[4]
薄型气缸的型号为CTACQS-12×10-B,主要参数如表2所示。
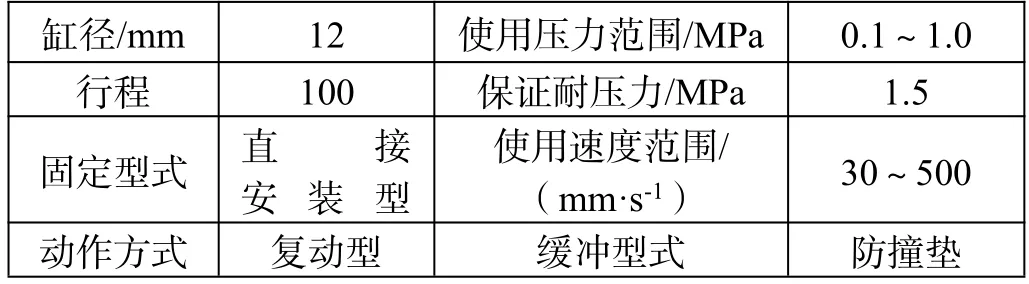
表2 薄型气缸型号与参数[5]
夹紧机构三维模型如图7所示。
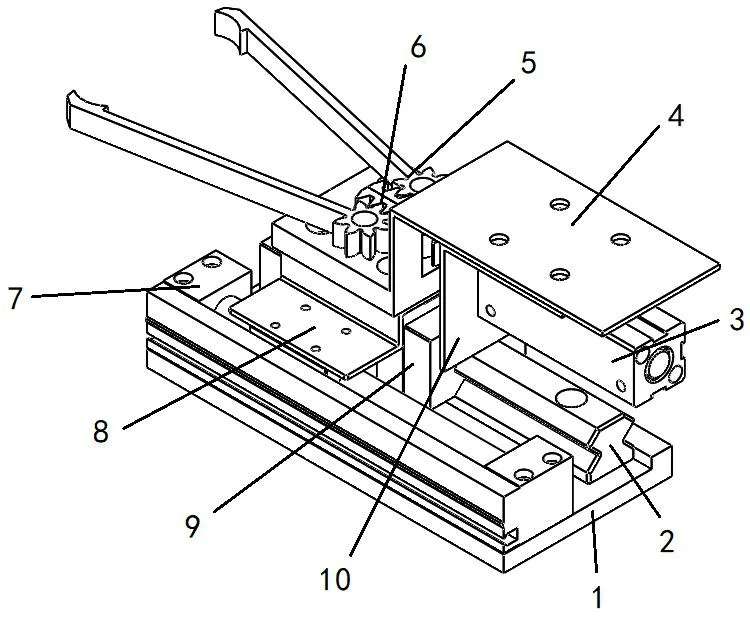
图7 夹紧机构三维模型
7 翻转机构虚拟模型
基于以上设计原理所制作的翻转机构总体三维模型如图8所示,该作品荣获了2020年全国三维数字化创新设计大赛湖南赛区特等奖、全国总决赛二等奖。
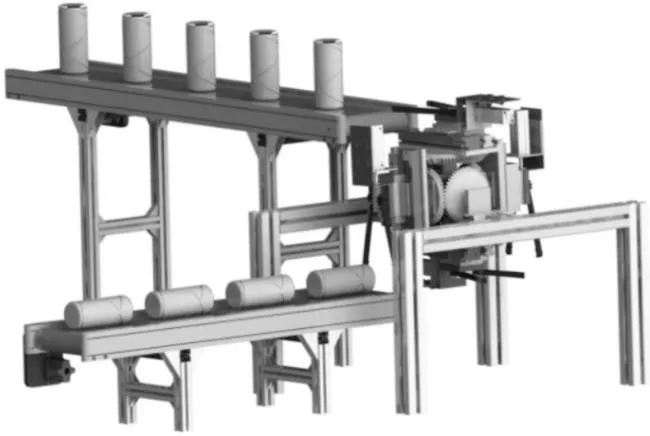
图8 翻转机构三维模型
8 结束语
行星轮翻转机构可实现中小型物体的快速平稳翻转,实现包装线、快递包裹线上等小型件的翻转。本设计是从汽车自动变速器中行星轮系的应用得到的启示,提出了一个可行性办法。4个行星轮带动4个夹持机构输出,即在1个翻转周期可完成4个对象的90°翻转,体积小、质量轻、结构紧凑、速度快,能够极大提高翻转效率。
猜你喜欢
装备制造技术(2021年5期)2021-08-14 01:45:02
机械设计与制造(2021年7期)2021-07-26 03:11:34
制造技术与机床(2017年7期)2018-01-19 02:29:51
潍坊学院学报(2017年2期)2017-04-20 08:44:17
设备管理与维修(2016年5期)2016-03-16 02:20:53
陶瓷学报(2015年4期)2015-12-17 12:45:04
橡胶工业(2015年10期)2015-08-01 09:06:02
湖南大学学报·自然科学版(2014年2期)2014-12-25 14:06:15
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:40
电视技术(2014年7期)2014-03-11 15:36:57
